相机标定中所要确定的几何模型参数分为内参和外参两种类型。相机内参的作用是确定相机从三维空间到二维图像的投影关系。相机外参的作用是确定相机坐标与世界坐标系之间相对位置关系。
2022-10-12 16:04:18 2245
2245 单目相机标定技术适用于被测表面曲率较小且需要获取实际数据的应用场合,比如食品、机械制造以及半导体等。
2023-07-21 11:32:272355 
本帖最后由 eehome 于 2013-1-5 09:47 编辑
三种常用的八位单片机性能比较
2012-08-16 19:08:14
三种常用的嵌入式操作系统——Palm OS、Windows CE、Linux;在此基础上、分析、比较这三种嵌入式操作系统,给出它们之间的异同点及各自的适用范围。1 嵌入式系统与嵌入式操作系统1.1
2021-12-22 07:36:58
三种常见的PCB错误是什么
2021-03-12 06:29:32
Teledyne e2v为系统设计师提供的定制方案处理器功耗的背景知识三种调整处理器系统功耗的方法
2021-01-01 06:04:09
三种远程测控终端(RTU)产品之间的比较
2021-05-28 06:27:08
常用的FBAR模型有哪三种?
2021-03-11 06:16:18
LoRa芯片应用:自组网透传、LoRaNET和LoRaWAN三种协议
2021-03-17 08:02:34
几篇张正友标定方法的英文原文,不少朋友看过张正友标定方法,这里提供他的英文原文。喜欢看英文文献的,以及愿意更深入理解matlab中相机标定工具箱的朋友可以参考。
2018-05-04 14:43:25
本帖最后由 一只耳朵怪 于 2018-5-25 14:55 编辑
DM6446内核有三种频率,有三种处理速度;这个速度和频率是对应的吗?由什么决定?最多可以接多少个TVP5146(单片传输速度不够)?
2018-05-25 06:47:06
FCC三种认证方式主要是针对不同类别产品。无线、射频类产品必须申请FCC ID,电脑及电脑周边产品需申请FCC DOC或ID,其它产品一般申请FCC VOC即可。三种认证方式中级别ID最高,需TCB
2015-10-22 14:11:47
HAL库中UART的三种收发方式是什么?
2022-02-18 06:33:52
HFSS三种辐射边界的区别与选择技巧是什么?
2021-05-21 06:54:59
://mp.weixin.qq.com/s/kcecV6PNE92FB8ugSoV4tw双目立体视觉系统使用两只相机同步采集图像,通过像素匹配获得深度图像,进而获取三维点云,系统结构如下。用下图来解释双目视觉的基本原理:图中所示变量为
2020-03-02 17:03:12
``【课程推荐】龙哥手把手教你学LabVIEW机器视觉设计教程请问哪位大神有Labview机器视觉相机标定的程序文件,麻烦分享一下?在下不甚感激!qq:599108466.``
2016-05-25 12:36:45
QSPI特点QSPI三种工作模式
2020-12-31 06:36:55
如何在不同的下载方式中选择STM32的启动模式呢?STM32三种BOOT启动方式的设置与应用分别是什么?
2022-01-18 07:01:55
STM32三种启动方式是什么
2021-12-15 07:16:54
STM32三种启动模式对应的存储介质是什么?
2022-01-27 07:00:03
STM32实现复位的三种常用方式问题:最近做项目碰到单片机程序运行过程中,需要根据外部输入信号,对单片机进行复位的操作。解决:目前常用的复位方式有硬件复位和两种软件复位:1、硬件复位通过给NRST
2021-08-12 07:23:06
STM32的三种Boot模式有何差异呢?如何去验证这种差异呢?
2021-11-26 07:15:38
、示例验证总结参考资料任务摘要请说明STM32的三种Boot模式的差异,并在之前第11-12周“C语言各种变量的存储地址”作业代码基础上,研究至少两种boot模式下,代码下载(烧录)运行后所在的地址位置,与理论对比验证。一、认识boot1.三种BOOT模式介绍所谓启动,一般来说就是指我
2021-12-10 07:46:37
最近在项目的时候需要判别STM32的复位类型,网上这部分资料也有许多大神进行总结。但是感觉不是特别深入,因此,小编参考参考了STM32的参考手册进行详细总结了一下。1、STM32的三种复位类型分别为
2021-08-02 06:32:00
USB设备端点有三种操作模式,包括自动验证模式、手动验证模式和Fly模式。 它们的功能是什么?
2020-12-03 06:46:02
相机标定不成功点击下一步没反应
2015-04-16 12:58:59
最近在做视觉,需要用labview做相机的标定,通过空间转换确定空间位置。视觉助手的标定只能标定内参数,没有办法做内外参数的标定,哪位大神给指导指导如何做一个标准的标定程序。
2017-04-24 16:08:44
labview视觉九点标定程序分享下,感谢各位大佬
2021-01-25 18:08:29
while的三种使用形式是什么样的?
2021-11-02 08:35:34
双目视觉的原理:由于视差原理,左右两个ccd的位置固定,若能测量空间中同一个点P在左右两个ccd中图像的位置,则根据三角原理,可以求得P点在空间中的坐标位置。可用于摄像头实现空间点的距离测量。下图
2021-09-27 16:52:18
主要内容本文提出了一种不依赖于棋盘格等辅助标定物体,实现像素级相机和激光雷达自动标定的方法。方法直接从点云中提取3D边特征,一避免遮挡问题,并且使用了精确度更高的深度连续边。文中首先指出:以下四种
2021-09-01 07:42:19
一灯双控的三种接线方法有哪些利弊
2021-03-11 07:10:04
什么是Boot模式?STM32三种Boot模式有什么差异?怎么实现STM汇编程序设计?
2021-11-29 06:04:54
本文逐一介绍三种视频数字接口的标准。
2021-06-03 06:24:31
一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。大多数人想知道的就是这三种控制方式具体根据什么来选择的?
2021-01-29 07:28:36
伺服电机的三种控制方式
2021-01-21 06:45:01
伺服有哪几种控制方式?伺服的三种控制方式具体根据什么来选择的?
2021-10-11 08:17:43
单元换算到实际单位时的大小,然后根据像素坐标计算实际坐标,那么如果我用相似三角形的原理的话,是不是可以结合它来使用而不进行相机标定求各位迷惑的和搞清楚的人都说一下你们的见解!!谢谢!!
2016-05-20 15:49:27
从不同的侧重点给出了几种拓扑,将对其进行分析比较三种拓扑有其各自的有缺点,如何来选择它们?
2021-04-07 06:05:16
刷机时用到的三种工具分别是什么?SD卡有何作用?fastboot是什么?fastboot有何作用?
2021-12-27 06:18:48
一个合适的软件架构不仅结构清晰,而且可以便于开发与维护。便于帮助开发者把握整个工程的框架三种常用的软件架构:1.顺序执行的前后台系统2.时间片轮询系统3.多任务操作系统顺序执行的前后台系统程序以变量
2022-01-07 08:29:54
UART、 I2C 和 SPI 是单片机系统中最常用的三种通信协议。1、初步介绍SPI 是一种高速的、全双工、同步通信总线,标准的 SPI 也仅仅使用 4 个引脚,常用于单片机和 EEPROM
2021-11-18 09:22:58
单片机系统中最常用的三种通信协议是什么?
2022-02-17 06:03:46
要求较高。根据双目立体视觉CCAS的原理,一般分为以下步骤:第一、相机标定。首先先对双目系统中的每一个相机进行标定,确认相机的畸变系数和内参矩阵。因为不同的相机、镜头在拍摄图像时的畸变和参数都不同,所以
2013-11-21 16:22:03
处理计算带来误差,为了消除这些误差,我们在进行3D视觉建模的过程中需要对我们使用的摄像机进行标定,获取相机内外参数,然后再根据内外参数对计算进行纠正。摄像机采集到的图像发生的畸变通常分为径向畸变和切向
2018-09-28 10:32:24
小白求助,求相机标定示例
2021-11-22 07:43:41
嵌入式三种定时器的区别在哪?嵌入式三种定时器的特点分别有哪些呢?
2021-12-27 06:49:27
蓝牙无线组网的优点是什么?常见的三种无线接入方式是什么?蓝牙无线组网原理与上网方案分享
2021-05-26 06:33:11
钢板进入两个相机的视野范围后,可测出钢板在相机视野中的长度L1、L2,再加上盲区的长度L0即为钢板长度L,即:L= L0+ L1+L2。 结语 采用工业相机对几何尺寸的测量,不仅仅限于以上三种,还可
2018-08-17 09:51:14
现在有一款相机配合远心镜头使用,产品比较小,比较精密,视野也很小,差不多也就1厘米吧,像这种情况一般怎么进行标定,是用那种比较精密的标定板吗?还有别的办法吗?论坛有视觉大神答疑解惑吗?
2020-01-03 16:58:31
LABVIEW 小白 想做一个轴承故障检测系统 需要选择轴承内圈外圈滚子三种故障计算公式算出的结果 要用枚举控件有人能给编一下吗就类似于用枚举控件选择三种不同类型的数值 可用数值常量代替
2018-04-27 16:51:41
结构光 线结构光视觉系统有着结构简单、使用灵活、受周围光照环境影响小等一系列特点,在实际中得到广泛的应用。在该技术的使用中,标定是避免不了的一个环节。线结构光的标定过程大概可以分为两个部分
2020-08-25 11:05:19
在机器视觉中,怎么标定坐标原点啊,我用的图像匹配可以标定一个坐标原点,但是在不同的图像上会有偏移,怎么才能减小偏移呢。求大家指教一下
2013-01-18 15:53:54
本帖最后由 lilin0734 于 2017-11-15 20:09 编辑
机器视觉手眼标定
2017-11-06 10:45:41
`机器视觉检测设备<span] 机器视觉检测设备采用的是工业相机分黑白相机跟彩色相机,今天思普泰克要跟大家聊聊这两种相机的成像原理。 一、<span] 曝光后
2019-12-16 16:30:56
1.机器人视觉机器人研究的核心就是:导航定位、路径规划、避障、多传感器融合。定位技术有几种,不关心,只关心视觉的。视觉技术用到“眼睛”可以分为:单目,双目,多目、RGB-D,后三种可以使图像有深度
2019-06-08 08:30:00
第三种WiFi模块是什么?有什么特点?
2021-05-14 06:49:07
嵌入式学习日记2018.11.62018.11.16理论学习阶段计算机科学导论(原书第二版)第8章 算法学到的新知识1算法的三种结构:顺序、判断(选择)和重复(循环)2常用的算法:求和、乘积、找最小
2021-11-08 07:12:04
编译的三种类型是什么?ARM_Linux制作嵌入式远程调试工具
2021-12-24 06:42:58
原理图的Grid Preset的默认情况下有三种设置,请问这三种设置有什么区别,是怎么使用的
2019-04-10 07:35:06
请群主详细解释下这三种启动方式,看了参考资料不是很明白其意!谢谢!
2019-07-17 04:35:12
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现手眼标定?
2020-05-28 14:42:35
进程类型进程的三种状态
2021-04-02 07:06:39
光学标定板应用领域宏诚光学玻璃系列标定板和陶瓷系列标定板是专为高校实验、研究单位项目研发和机器视觉集成商产品标定等等客户群体使用的常用标定工具,能够方便获得相机的标定数据。标定板作用:为校正镜头畸变
2022-09-20 08:14:32
matrox mil开发资料:CALIBRATION相机标定模块
2015-12-10 16:32:06 8
8 什么是摄相机标定?摄相机标定方法的分类?感兴趣的小伙伴们可以瞧一瞧。
2016-09-22 12:04:450 问题,、提出一种基于双目视觉的投影仪标定算法,将投影仪视为逆向相机,利用一个辅助相机捕获投影于不同位置标定平面,确立摄像机图像与标定平面之间的对应关系,然后利用极线原理得到摄像机图像与投影仪图像之间的对应关
2017-11-06 15:30:2120 我们首先介绍下计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系。以及他们之间的关系。然后介绍如何使用张正友相机标定法标定相机。摄像机标定(Camera calibration)简单来说是从世界坐标系换到图像坐标系的过程,也就是求最终的投影矩阵的过程。
2017-12-04 16:56:3517861 
针对张正友标定方法中相机内参数的求解可能陷入局部最优解的问题,考虑镜头的三阶径向畸变和二阶离心畸变,提出一种基于改进遗传算法的单目相机内参数优化标定方案。该方法可显著提高相机标定中内参数的精度,并能避免陷入局部最优。最后,实验验证了所提方案的有效性和可行性。
2018-01-05 16:11:491 目前的深度相机根据其工作原理可以分为三种:TOF相机、双相机立体视觉、结构光投射立体视觉。
2019-05-14 09:04:587615 相机标定可以说是计算机视觉/机器视觉的基础,但是初学者不易上手,本文将给读者整理一遍相机标定的逻辑,并在文末回答评论区提出的问题。分为以下内容:
2019-06-01 09:54:153969 
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2020-08-28 11:42:4610854 
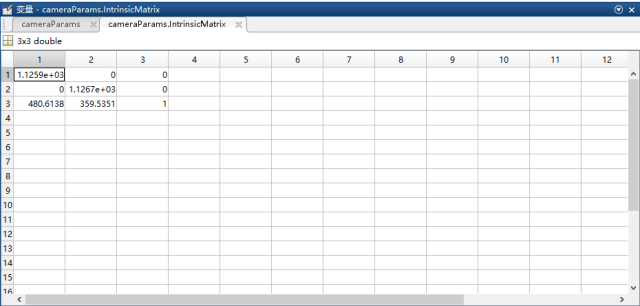
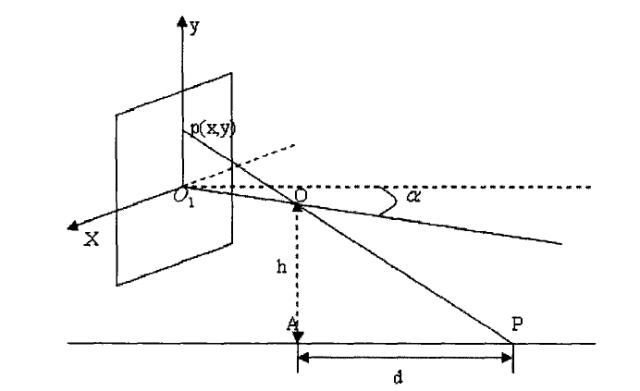
在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。
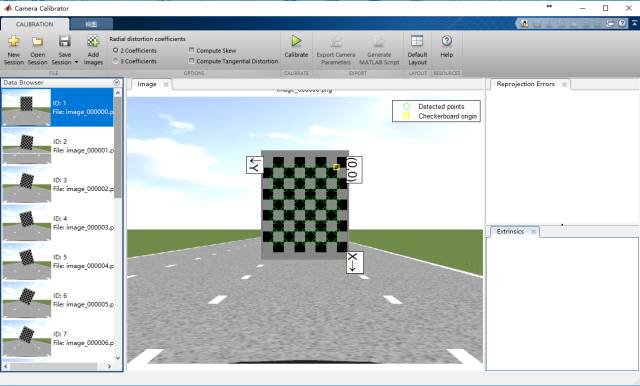
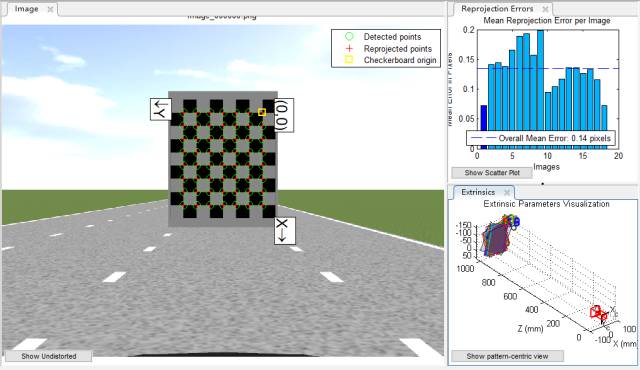
2020-08-28 15:18:0812721 采用张正友提出的基于2D平面棋盘格的摄像机标定方法,利用Matlab摄像头标定工具完成相机参数的标定。
2020-08-31 10:04:124714 
转自:微信公众号AI图像 创建标定数据模型 你可以用算子create_calib_data创建一个标定数据模型,指定相机和标定物体的数量。当用一个相机的时候,你也用一个单独的标定物体。 然后,你要做
2020-10-31 11:31:383434 
张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定
2020-12-31 10:06:195420 
相机标定在计算机视觉领域中有着至关重要的作用。绝大多数相杋标定方法假设相机为针孔模型,且需要良好聚焦的图像来保证相机內外参估计的准确性。然而,这些条件会受到相机景深的影响。在薄透镜相机模型假设
2021-04-21 15:05:5716 相机固定不动, 上往下看引导机器人移动 机器人与视觉标定理论详解 1.相机非线性校正使用标定板做非线性校正2.相机与机器人做9点标定可以使用机器人扎9个点,或者机器人抓住工件摆放9个位置,得到
2021-05-27 14:15:533251 
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2022-06-21 11:12:347612 在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,手眼标定等。
2022-08-18 15:54:375456 相机标定可以归纳为P−n−P(Perspective-n-Point)的问题,即已知三维物点坐标和对应的二维投影坐标,求解相机参数。由于镜头的畸变(径向和切向)带来非线性成像模型,一般求解方法分为两步:
2022-12-21 09:52:30857 在图像测量过程以及机器视觉应用中,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,这些几何模型参数就是相机参数。在大多数条件下这些参数必须通过实验与计算才能得到,这个求解参数的过程就称之为相机标定(或摄像机标定)。
2023-01-10 10:59:04971 此方法采用一块大标定板来统一各个相机的坐标,每个大标定板中有若干小标定板,各个小标定板间的位置关系都是已知的,各个相机都能拍摄到一个小标定板。通过各个小标定板可以标定每个相机的内部参数和外部参数,每个相机的坐标都可以转换到各个小标定板的坐标系上,从而统一各个相机的坐标。
2023-03-13 10:06:371506 该数据集包括了不同仿真环境下生成的合成数据,以及不同场景下由各类真实相机采集到的图像和视频序列。每一个数据样本均提供了准确的标定结果、相机参数、或视觉线索。
2023-04-10 10:45:38212 相机标定是通过输入带有标定patter的标定板来获得相机参数的一个过程。实际的光学成像是一套非常复杂的过程,从三维世界投影到相机中的二维图像。相机标定就是用抽象的数学模型来表示这个复杂的成像过程。
2023-06-01 14:36:46430 
相机标定是计算机视觉最基础也是至关重要的一个问题,标定的精度够不够决定了以后的校正、去畸变、配准、计算三维坐标、恢复三维模型能否进一步做下去。
2023-06-26 09:51:30312 首先,课程介绍了双目相机标定的基础知识。我了解到双目相机是由两个相机组成的系统,通过同时拍摄目标物体的两个视角来获取三维信息。
2023-07-03 14:25:061916 
在大多数条件下,这些参数必须通过实验与计算才能得到。无论是在图像测量或者机器视觉应用中,相机参数的标定都是非常关键的环节,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。
2023-08-03 09:38:04830 
张正友标定方法是一种经典的相机标定方法,目前是最受欢迎的方法之一。该方法通过一种机器学习的方法,利用大量匹配的数据点像素坐标、世界坐标,基于极大似然估计拟合得到一个最优解。
2023-08-03 10:59:12641 
常见的机器人视觉伺服中要实现像素坐标与实际坐标的转换,首先就要进行标定,对于实现视觉伺服控制,这里的标定不仅包括摄像机标定,也包括机器人系统的手眼标定。
2023-08-04 11:48:47579 
对于摄像机标定问题已提出了很多方法,摄像机标定的理论问题已得到较好的解决,对摄像机标定的研究来说,当前的研究工作应该集中在如何针对具体的实际应用问题,采用特定的简便、实用、快速、准确的标定方法。
2023-08-04 12:54:171386 
这个逼近的过程就是「相机标定」,我们用简单的数学模型来表达复杂的成像过程,并且求出成像的反过程。标定之后的相机,可以进行三维场景的重建,即深度的感知,这是计算机视觉的一大分支。
2023-10-18 17:00:07476 
正在加载...
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论