在无人机视觉系统的常规研究中,用于基于视觉的导航的视觉同步定位和映射(Visual SLAM)和视觉里程计(VO)是主要课题。
2022-07-28 11:21:42 1108
1108 传感器是数据收集,系统监测和控制反馈的重要组成部分。在运动控制应用中,传感器采用旋转或直线编码器进行位置反馈,传感器(如用于速度传感的转速计),甚至接近开关来启动或停止某些机器动作。例如在液压运动
2018-11-12 11:47:37
手机中普遍存在的消费类惯性传感器使人们对其精度普遍感到失望,因此,在推动运动物联网(IoMT)的概念方面,迄今都没有什么成效。然而,新型高性能工业传感器能支持精确的角度指向和精确的地理定位性能,同时还能达到必要的尺寸和成本效率要求,故而现在又做好了推动运动物联网发展的准备。
2020-05-18 08:32:23
的工作环境要求。 SKM-4DX引脚定义: 此惯性导航模块的优势:(1)摆脱里程计常规车载导航系统往往依靠里程计和陀螺仪的DR方案,实现汽车复杂环境下的高精度导航定位,里程计信号对于很多汽车后装市场
2020-08-13 01:29:45
了发明陀螺仪的理论研究。陀螺仪再加上加速度计,就是惯性导航的传感器部分了。这样,运动路径就和传感器可测得的加速度、角加速度这两个量联系在了一起。惯性导航就是通过测量这两个瞬时变量,在经过一系列公式运算
2020-08-14 04:39:59
谁能帮我的2012版本的labview,下个imaqvision,怎么下载,在面板上都找不到视觉与运动的那几个控件,谁能帮我解决这个问题,必有重谢!
2017-09-07 22:03:16
GPS北斗卫星+惯性组合导航模块有哪些优势呢?普通GPS北斗模块在环境复杂的城市环境中定位没有那么精确,时常出现漂移、定位慢、无法定位等情况,比如在高架桥下,在穿山隧道里面,卫星信号微弱或者完全没有
2019-07-15 04:35:55
运动,NI的视觉分析包中的功能很强大,大家可以看NI example中的例子进行学习.附件中Christopher写的Image Acquisition and Proccessing
2015-02-10 11:30:19
刚刚接触使用 Labview 做视觉与运动这个模块,谁有简单案例,可以共享下!{:23:}{:23:}
2013-04-10 19:44:02
同时安装labview 2012 和labview2014 以及VAS模块,在NI MAX中可以调用摄像头,在LB2012中可以看见视觉运动模块,但在LB2014中没有视觉运动模块,求解
2018-12-30 09:33:44
导入单轮电机的类实例化,创建对象。第二,创建一个叫base_controller的节点,然后订阅/cmd_vel(速度)主题,定义要发布的/odom(里程计)主题(里程计功能我还暂未实现,但是...
2021-09-07 06:18:44
什么是SIEMENS ppi协议?SIEMENS ppi协议在运动控制中的应用是什么?
2021-07-05 07:10:15
labview 视觉与运动视频教程谁有啊 求大神指点可以的话qq聊
2013-08-02 21:05:55
有谁知道哪位博主labview视觉与运动比较精通?
2013-08-03 09:54:06
求labview2013 视觉与运动工具包
2015-07-18 13:08:13
实现SLAM的算法。根据融合框架主要研究松耦合,松耦合中惯导运动估计和视觉运动估计系统是两个独立的模块,同时将每个模块的算法输出结果进行融合,以惯性数据为核心,视觉测量数据修正惯性测量数据的累积误差。但目前要
2023-03-19 14:45:46
、重量轻宽压供电功耗低 。 随着对武器系统性能要求的提高,因此有了线加速度计可以安装在运动物体内直接测量其加速度,进而得到速度和位置,其测量精度高,动态性能好,远比空速度计、里程计好得多。`
2020-03-06 21:22:05
什么是SFS阴影重建视觉技术?如何处理运动中目标物的检测?SFS阴影重建技术的优势是什么?
2021-06-01 06:10:16
车速里程表是由指示汽车行驶速度的车速表和记录汽车所行驶过距离的里程计组成的。目前有机械式和电子式两种。
2019-09-25 08:21:23
系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM-4DU利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。未来,SKYLAB将继续致力于高性能、高精度定位模块
2017-10-12 18:13:02
说到机器人自主定位导航解决方案及技术,大家脑海里肯定会浮现“定位”、“建图”、“避障”、“路径规划”等字眼。定位 在思岚提供的自主定位导航解决方案中,主要是通过雷达和里程计的数据来进行定位。虽然
2018-03-28 15:48:15
谁能帮帮小弟我! 十分感谢! 要求:用c语言编写一个自行车速度计和里程计! 基于芯片AT89C51,用霍尔元件测速度!用lcd1602显示最好!不要求报警!能有一个开关暂停显示!小弟的qq1252295329!!求大神高手指点一个
2013-04-16 20:01:46
proteus仿真单片机实验实训仿真文件 出租车行驶里程计数
2016-10-22 10:59:33
旋转运动。由于某些最终产品在其他形式的运动以外还须测量旋转,所以可以将陀螺仪集成到惯性测量单元(IMU)中,其中内嵌了一个多轴陀螺仪和一个多轴加速度计。利用加速度提升可用性,进行电源管理前面我们注意到
2018-11-01 11:33:50
是惯性传感器的作用主要体现在最终产品有必要检测加速度和减速度的时候。诚然,从纯科学的角度来看,确实是这样。但是,这种看法忽视了MEMS加速度计和陀螺仪日益增加的诸多用途…… 通过审视五种运动检测模式
2019-07-16 06:49:53
一、 系统设计关键部件:器件选型2 关键技术选型2.1 基于二维码+轮子里程计的机器人定位方案主流方案效果循线根据电磁线行走存在路线固定的问题纯视觉室内相似场景较多,存在重定位问题纯激光成本高,存在
2021-11-11 07:10:45
里程计工作原理是什么?汽车里程计的受扰现象有哪些?
2021-05-19 07:26:30
如何实现出租车里程计时系统设计?
2021-10-27 07:17:30
视觉惯性里程计 综述 VIO Visual Inertial Odometry msckf ROVIO ssf msf okvis ORB-VINS VINS-Mono gtsam目录里程计
2021-07-27 07:21:50
通过编码器获得轮式里程计的测量数据,车轮的转动被转换成线性位移。对于指定初始位置的运动估计,通过积分得运动增量,从而得到当前的位置信息。 · 该方法具有精度短、成本低、采样率高的优点 · 但车轮会产生打滑,定位误差会随着移动距离增加,影响长期精度 (2)惯性导航 惯性导航系统是自主的,..
2021-09-01 07:15:25
嵌入式视觉系统的优势是什么?
2021-12-27 06:38:44
怎么实现基于SOPC的运动视觉处理系统的设计?
2021-06-04 06:33:28
想要视觉与运动模块!! 求助…………
2012-11-01 15:31:36
:基于滤波器的定位算法主要有KF、SEIF、PF、EKF、UKF等。也可以使用单目视觉和里程计融合的方法。以里程计读数作为辅助信息,利用三角法计算特征点在当前机器人坐标系中的坐标位置,这里的三维坐标计算需要
2019-06-08 08:30:00
求视觉与运动模块中控件的详细介绍,谢谢,邮箱724989634@qq.com
2013-02-25 07:52:39
求labview 有关视觉与运动的视频教程网址谢谢!
2013-08-02 21:04:39
谁能帮帮小弟我! 十分感谢! 要求:用c语言编写一个自行车速度计和里程计! 基于芯片AT89C51,用霍尔元件测速度!用lcd1602显示最好!小弟的qq411694253!!求大神高手指点一个
2016-05-17 20:47:25
测量运动物体的加速度,并自动进行积分运算,获得运动物体瞬时速度和瞬时位置数据的技术。 惯性导航系统一般安装在运动物体内部,工作时不用依赖外界提供信息就能进行导航,不易受到干扰,是一种自主式导航系统
2018-03-26 11:26:37
算法类型在运动控制中常用的加减速控制算法有指数、直线、S型曲线和三角函数加减速控制算法。PS:S型曲线加减速关注度指数,近年在上升。冲击类型和加加速度解释刚性冲击:速度发生突变,加速度理论上为无穷大
2021-09-03 08:57:57
自动驾驶定位技术就是解决“我在哪儿”的问题,并且对可靠性和安全性提出了非常高的要求。除了GPS与惯性传感器外,我们通常还会使用LiDAR点云与高精地图匹配,以及视觉里程计算法等定位方法,让各种定位法
2019-05-09 04:41:09
电系统(MEMS)惯性传感器的设计在本质上对运动非常敏感,可有效检测和处理线性加速、磁航向、海拔和角速率信息。为充分利用惯性传感器的性能潜力,设计者必须熟悉总体机械系统,密切关注应用中的运动源和谐
2018-11-12 15:38:15
(Inertia navigation system,INS) 利用陀螺仪和加速度计 (统称为惯性仪表) 同时测量载体运动的角速度和线加速度,并通过计算机实时计算出载体的三维姿态、 速度、 位置等导航信息
2020-06-13 08:00:00
请问如何理解SLAM用到的传感器轮式里程计IMU、雷达、相机的工作原理?
2021-10-09 08:52:46
运用传感器融合技术来确保各种条件下的精准导引。在多个领域,基于运动的传感器成为移动应用的价值倍增器。手机中普遍存在的消费类惯性传感器使人们对其精度普遍感到失望,因此,在推动运动物联网(IoMT)的概念
2018-10-24 10:33:01
该文针对全局运动估计计算复杂度过高的问题,提出了一种基于运动矢量对消和差分原理的快速全局运动估计方法。基于不同象限运动矢量对之间存在的对称抵消特性,首先估计出
2009-11-20 15:26:59 12
12 块匹配运动估计VLSI结构研究与进展:块匹配运动估计是视频编码器中的计算量和存储访问最密集的模块,为了满足实时编码的需求常用VLSI 结构实现。本文对块匹配运动估计的VLSI 结
2009-12-14 09:49:244 为了降低全搜索运动估计算法带来的巨大计算量,提高运动估计计算速度,提出了一种新型的用于全搜索运动估计硬件结构。该硬件结构能实时地通过全搜索运动估计来搜索每个像素块
2010-07-29 16:07:4516 什么是运动估计
运动估计基本思想是将图像序列的每一帧分成许多互不重叠的宏块,并认为
2008-08-25 13:11:533353 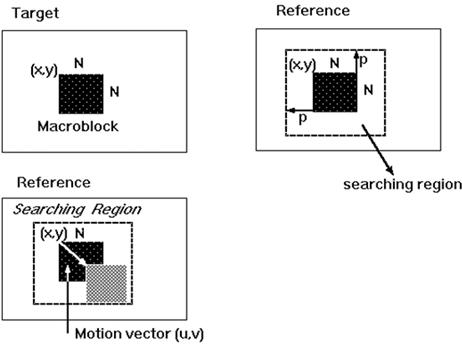
通过分析全景视觉与里程计传感器的感知模型的不确定性,提出了一种基于路标观测的 移动机器人 自定位算法. 该算法利用卡尔曼滤波器,融合多种传感器在不同观测点获取的观测数据完
2011-06-28 10:58:4641 汽车里程计数项目PCB文件
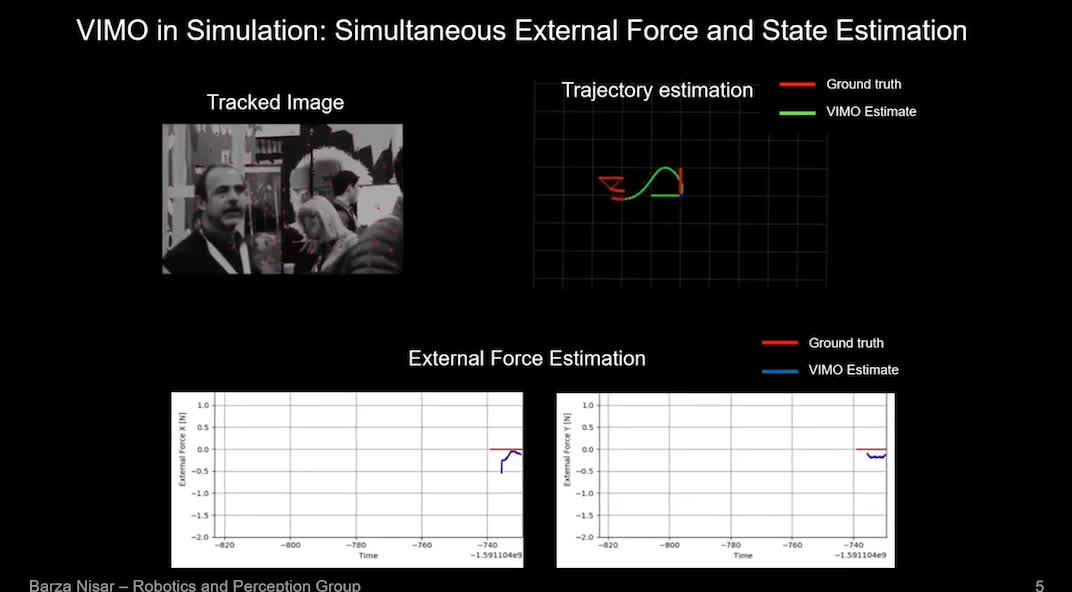
2017-02-27 16:43:517 应用跳出屏幕的限制,让它们能够以全新的方式与现实世界进行交互。 基础技术视觉惯性里程计 ARKit 使用视觉惯性里程计 (Visual Inertial Odometry, VIO) 来精准追踪周围
2017-09-25 16:08:220 针对轮式仓储物流机器人的自主定位问题,提出了一种基于视觉信标和里程计数据融合的室内定位方法。首先,通过建立相机模型巧妙地解算信标与相机之间的旋转和平移关系,获取定位信息;然后,针对信标定位方式更新
2017-11-28 10:16:420 使用几何假设和测试架构从特征轨迹产生相机运动的鲁棒估计。这就产生了我们称之为视觉测径法,即仅从视觉输入的运动估计。没有事先知道的场景或运动是必要的。视觉里程计还可以结合来自其他来源的信息,如GPS、惯性传感器
2018-12-03 08:00:001 debug,尤其是通信芯片的debug,可以有很多的方法。一个数据帧从进入到输出,可以在通路上的关键节点处设置监测如各种计数器等,可通过VIO(xilinx)定时上报实时状态。可以把VIO的各个
2019-07-19 10:19:156570 
在导航系统中,里程计(odometry)是一种利用致动器的移动数据来估算机器人位置随时间改变量的方法。例如,测量轮子转动的旋转编码器设备。里程计总是会遇到精度问题,例如轮子的打滑就会导致产生机器人移动的距离与轮子的旋转圈数不一致的问题。
2019-08-08 14:21:1325310 
本文档的主要内容详细介绍的是计算机视觉概论完成主成分分析和分类开始运动估计资料免费下载。
2019-11-29 08:00:000 随着自行车行业和电子技术的发展,自行车速度里程计技术也在不断进步和提高,不仅可以显示速度里程,还可以显示热量消耗、心跳等参数,在大家注重环境保护和运动健康的今天,速度里程计不仅可以使运动者运动适量
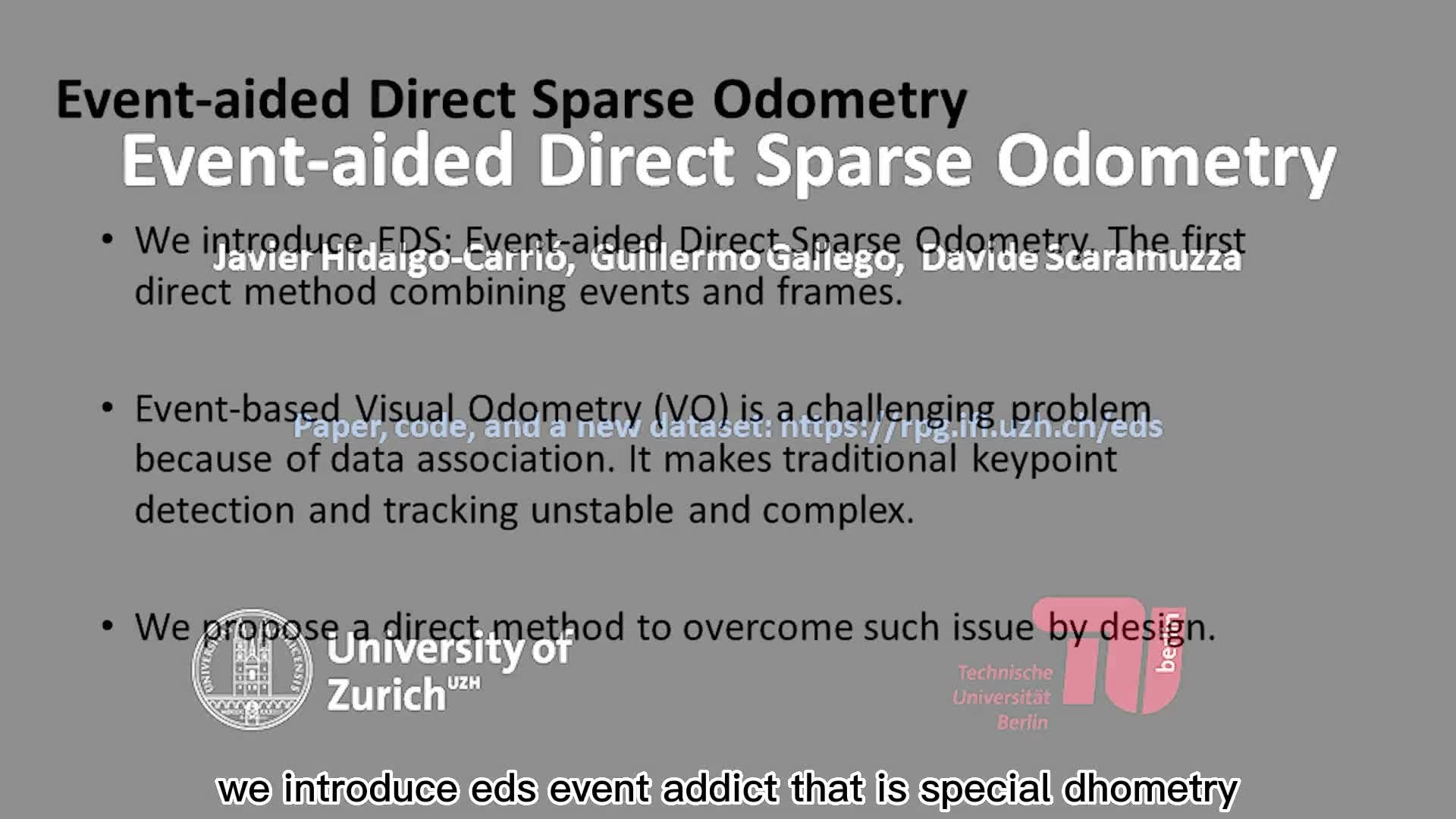
2020-05-15 08:00:007 鲁棒数据关联是视觉里程计的核心问题,图像间的对应关系为摄像机姿态和地图估计提供了约束条件。目前最先进的直接和间接方法使用短期跟踪来获得连续的帧到帧约束,而长期约束则使用循环闭包来建立。在这篇论文
2020-10-28 08:00:000 惯性是物体对速度变化的阻力,物体越重或尺寸越大,其惯性就越大。在运动控制或伺服系统中,电机和负载都有惯性,它们的惯量之比将影响系统的性能。
2020-12-14 22:49:35874 本文提出的立体视觉+惯导+激光雷达的SLAM系统,在比如隧道一些复杂场景下能够实现良好性能。VIL-SLAM通过将紧密耦合的立体视觉惯性里程计(VIO)与激光雷达建图和激光雷达增强视觉环路闭合相结合
2021-02-18 17:59:061949 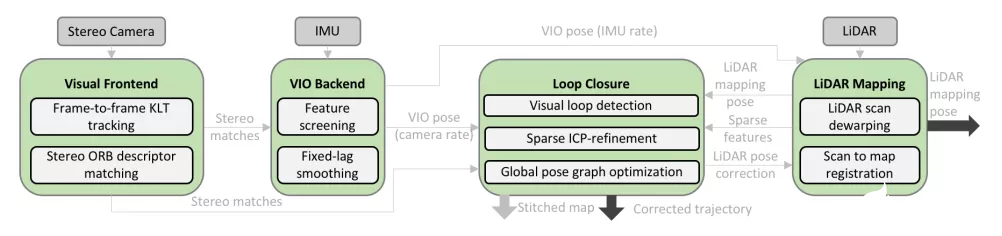
惯性是物体对速度变化的阻力,物体越重或尺寸越大,其惯性就越大。在运动控制或伺服系统中,电机和负载都有惯性,它们的惯量之比将影响系统的性能。
2021-03-18 06:09:2057 VIO-SLAM Visual-Inertial Odometry(VIO)即视觉惯性里程计,有时也叫视觉惯性系统(VINS,visual-inertial system),是融合相机和IMU数据
2021-04-07 16:57:072163 
传感器读取数据后,视觉里程计估计两个时刻的相对运动(Ego-motion),后端处理视觉里程计估计结果的累积误差,建图则根据前端与后端得到的运动轨迹来建立地图,回环检测考虑了同一场景不同时刻的图像,提供了空间上约束来消除累积误差。
2021-04-14 13:36:215668 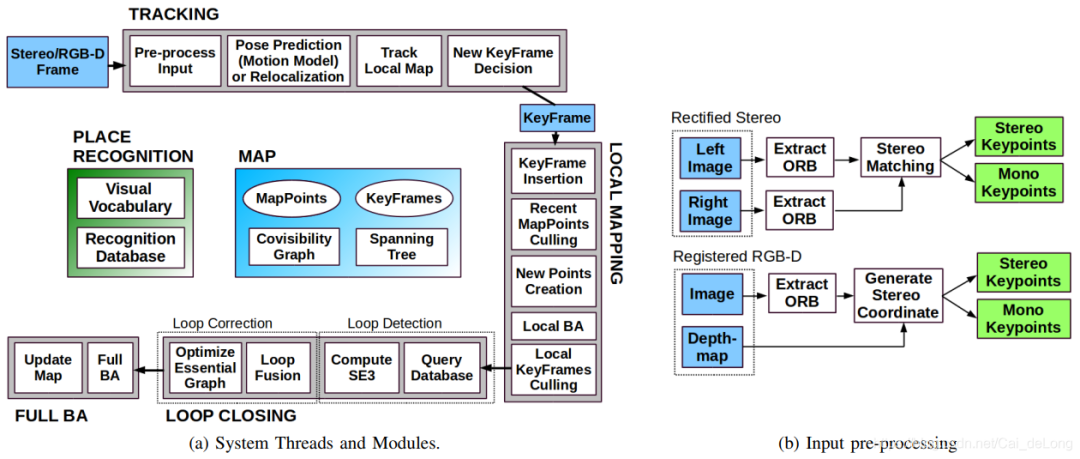
其中VO(visual odometry)指仅视觉的里程计,T表示位置和姿态。松耦合中视觉运动估计和惯导运动估计系统是两个独立的模块,将每个模块的输出结果进行融合。
2021-04-15 15:14:522287 
针对使用传统单目相机的全自动三维重建方法结果精确度差和整体结构理解缺失等问题,提出一种结合视觉惯性里程计和由运动到结构的全自动室内三维布局重建系统。首先利用视觉里程计获得关键帧图像序列和对应空位
2021-04-21 11:17:1419 针对单一RGBD摄像头SLAM时,快速移动导致跟踪失败的问题,提出了一种基于UWB、里程计和RGBD融合的室内定位方法。该方法在UWB定位的基础上,利用里程计降低UWB固有的漂移误差。使用了加权平均
2021-04-25 14:47:5414 虚拟输入输出(Virtual Input Output,VIO)核是一个可定制的IP核,它可用于实时监视和驱动内部FPGA的信号,如图所示。 可以定制VIO的输入和输出端口的数量与宽度,用于
2021-09-23 16:11:236840 
一般情况下ILA和VIO都是用在chipscope上使用,VIO可以作为在chipscope时模拟IO。
2022-06-12 15:51:541682 从全称上可以看出,该算法是一个紧耦合的雷达惯导里程计(Tightly-coupled Lidar Inertial Odometry),借助的手段就是利用GT-SAM库中的方法。
2022-09-14 10:11:011404 R3LIVE++ 由实时运行的 LiDAR 惯性里程计 (LIO) 和视觉惯性里程计 (VIO) 组成。LIO 子系统利用来自 LiDAR 的测量来重建几何结构,而 VIO 子系统同时从输入图像中恢复几何结构的辐射信息。
2022-10-17 09:34:371828 LIO-SAM 提出了一个利用GT-SAM的紧耦合激光雷达惯导里程计的框架。实现了高精度、实时的移动机器人的轨迹估计和建图。
2022-10-31 09:25:491958 本文提出了一种新的直接视觉里程计算法,利用360度相机实现鲁棒的定位和建图。本系统使用球面相机模型来处理无需校正的等距柱状图像,扩展稀疏直接法视觉里程计(DSO,direct sparse odometry),从而实现全方位感知。
2022-12-14 14:53:43512 但凡涉及到可移动的机器人的导航系统,大概率会涉及到里程计的计算,比如轮式移动机器人、无人机、无人艇,以及多足机器人等,而计算里程计的方案也有很多种,比如基于编码器合成里程计的方案、基于视觉的里程计
2023-04-19 10:17:521062 摘要:本文主要分析轮式移动机器人的通用里程计模型,并以两轮差速驱动机器人的里程计计算为案例,给出简化后的两轮差速驱动机器人里程计模型。
2023-04-19 10:16:311188 论文提出了PVO,这是一种新的全景视觉里程计框架,用于实现场景运动、几何和全景分割信息的更全面建模。
2023-05-09 16:51:581286 
现有很多LiDAR里程计都依赖于某种形式的ICP估计帧间位姿,例如CT-ICP, LOAM等。
2023-05-09 16:55:12842 
提出一种新型的视觉-LiDAR里程计和建图系统SDV-LOAM,能够综合利用相机和激光雷达的信息,实现高效、高精度的姿态估计和实时建图,且性能优于现有的相机和激光雷达系统。
2023-05-15 16:17:21433 
受简化惯性传感器系统(RISS)[23]的启发,我们开发了视觉惯性车轮里程计(VIWO)。具体而言,我们将MSCKF中的系统模型重新设计为3DRISS,而不是INS,使用里程表、3轴陀螺仪和2轴(向前和横向)加速计的单通道速度测量。
2023-06-06 14:30:42983 
打印产品为运动医学的新技术进步铺平了道路,与使用传统制造和设计相比,可以加速恢复,缩短康复时间,更快返回运动场。弹性体3D打印在运动领域的优势在制造过程中,弹性体3
2023-03-08 16:54:25367 
视觉惯性融合技术应用于机器人和自动驾驶方面。单目相机和低成本IMU成为最佳选择。因为VIO系统的高度非线性,初值对视觉惯性系统很重要,但很难获得精确的初始状态。
2023-06-21 09:22:07581 
LOG-LIO的流程接收来自3D激光雷达和惯性测量单元(IMU)的输入,如图2所示。对于新的输入扫描,我们首先使用Ring FALS来估计原始点的法线,在使用IMU测量校正畸变后,根据它们的局部几何信息,在未畸变的点云和地图之间执行关联。
2023-08-18 15:45:30465 
IMU测量可以提高视觉SLAM在某些复杂场景的鲁棒性,在于相机快速运动、动态障碍物、光线明暗变化明显、环境中纹理缺失等导致图像信息质量较差的情况下,利用IMU信息仍能得到有效的定位结果。
2023-09-07 16:57:061095 
VoxelMap++的流程如图1所示,LiDAR原始点预处理方法和基于迭代误差状态卡尔曼滤波器的状态估计方法与FASTLIO 类似。值得注意的是,本文的建图方法可以适用于其他最先进的LiDAR惯性算法,无论其基于卡尔曼滤波器还是优化。
2023-09-11 17:02:56501 
1.通信协议 里程计数据格式(19字节) 2.STM32端 /** * @brief 发送里程计数据 */ void DataTrans_Odom ( void ) { uint8_t _cnt
2023-11-16 16:48:37189 
 电子发烧友App
电子发烧友App



















 工商网监
工商网监
评论