` 本帖最后由 13chfang 于 2015-7-31 17:07 编辑
STM32主控,全部题目完成。最近也在参加最近国赛培训,用了三天时间把13年的倒立摆的全部题目做了出来,贡献一下源代码给各位参考~主要还是pid的参考~`
2015-07-30 16:09:33
基于STM32F407设计并制作一套简易旋转倒立摆及其控制装置。旋转倒立摆的结构如图 1 所 示。电动机 A 固定在支架 B 上,通过转轴 F 驱动旋转臂 C 旋转。摆杆 E 通过转轴 D 固定
2019-08-26 20:45:23
2015 年全国大学生电赛题——风力摆控制系统(B 题) 一、系统设计方案论证1. 预期目标1)主控芯片选择2)传感器选择3)电机选择4)连接杆选择5)驱动芯片选择6)人机交互系统1.1.2 分析
2021-07-23 06:23:18
2015全国电子设计大赛,风力摆控制系统的题目
2015-08-12 10:06:48
2015年全国电子设计竞赛 控制类题目《风力摆控制系统》
2017-09-01 09:42:26
正在做一个环形倒立摆(C51单片机控制)!!遇到问题如下 请大家指点迷津{:1:};我用的是10位绝对型倒立摆 ,有10条数据线,输出格雷码. 请问这10条数据线是否直接与单片机 IO口相连,连完之后又该如何对这组格雷码进行检测并输出二进制数!!{:21:}大神大神 请帮助一下
2014-07-28 22:03:58
目录一、倒立摆系统简介二、二级倒立摆模型构建三、二级倒立摆的线性化模型四、二级倒立摆的状态空间模型一、倒立摆系统简介倒立摆控制系统作为实验装置在控制理论领域的教学与科研工作中担任着不可或缺的角色
2021-09-01 07:14:57
国赛c题的倒立摆题目,大家是选什么材料当转轴D的?滑轮?滑轮会不会太滑,不好控制?还有什么其他好的材料用转轴的?
2013-09-05 13:54:37
什么是倒立摆?倒立摆该如何去实现呢?
2021-12-23 06:18:33
五部分组成?各部分的作用是什么? 2. 简述四类常见的微型计算机控制系统的特点及其应用领域。 3. 计算机控制系统的发展趋势是什么? 4. 操作指导、DDC和SCC系统工作原理如何?它们之间有何区别和联...
2021-09-01 06:49:33
`风力摆控制系统赛题解析及源代码开源BoXDesign参加过2015年全国大学生电子设计竞赛做风力摆控制系统的小伙伴们一定对这道题目印象深刻,不管是成功还是失败,各位肯定都是收获不少。看了网上各位
2015-10-30 20:42:51
本帖最后由 wherelse 于 2017-6-30 15:46 编辑
板子在手上也有一个多月了,在经过充分的熟悉之后,准备开始着手准备倒立摆项目了。倒立摆作为倒立摆控制系统是一个复杂
2017-06-29 15:59:40
其操作及其库函数,验证其性能,我选择了倒立摆这个经典的控制系统。项目中用到的资源: 定时器——Neutron提供最多十个由FreeRTOS接管的定时器。ADC模数转换——Neutron精度为12位
2017-07-14 17:31:27
项目名称:基于陀螺仪与ADC的旋转倒立摆试用计划:1. 开箱评测初步介绍该开发板的外设及基础功能,以及硬件配置资源,并完成点亮一个LED灯;2. 各个功能模块初步使用体验,尝试使用温湿度、气压传感器
2017-05-08 17:39:04
一级倒立摆的Simulink仿真 单级倒立摆稳定控制 直线一级倒立摆系统在忽略了空气阻力及各种摩擦之后,可抽象成小车和匀质摆杆组成的系统,如图1所示。m g杆长为 2u图1 直线一级倒立摆系统图
2021-09-01 06:45:42
前一段时间参加了电子设计大赛,做的是旋转倒立摆,在网上看了看别人的作品,大多数都是简单的一级倒立摆,现在想尝试一下做二级倒立摆。看了看该款主控芯片的资源,能满足该作品的需求,所以最终决定做二级倒立摆,恳请组委会审核!
2013-10-28 10:02:39
计算机控制技术练习题计算机控制系统有哪几部分组成?什么是DDC控制系统?简述SCC控制系统的两种结构形式。什么是集散控制系统?现场总线控制系统的特点是什么?目前流行的计算机控制系统的控制规律有哪几种
2021-09-01 08:30:08
你们做倒立摆时对倒立摆进行建模了吗?感觉数学水平不够,建模有点难。但是做倒立摆时对PID的整定不建模怎么办,就通过不断的试吗?有在搞这个的么,求经验!!
2015-07-29 18:29:44
最近小弟在做一个小车倒立摆的结构,但是电机要通过计算去选取,大佬们有什么好的建议吗?另外还想做一下机械运动仿真,因为实在是不懂,所以请问用proe能做出倒立摆结构的运动仿真吗?
2020-04-23 00:52:59
留在学校要做一个15年电赛的题目,选择了风力摆控制系统,但是没有什么基础,从头开始学起,想问问有没有人可以讲解一下。基本题目和需要器件已了解,无从下手
2017-07-09 16:54:50
在调节倒立摆时如何将精密电位器的角度值与电机的pwm调节联系起来,想通过增量式pid算法调节倒立摆。还有,pid参数调节有没有相关软件,麻烦推荐一下。O(∩_∩)O谢谢!!!
2017-07-27 10:47:46
倒立摆分析、建模与仿真引言倒立摆是机器人学中一个非常重要的模型,火箭、导弹、双足机器人、四足机器人,基本都是倒立摆的变形。问题描述关于倒立摆的问题描述如下:如图所示的倒立摆系统。摆的关节连接在一个可
2021-09-07 06:59:42
本人目前正在打算设计一个基于瑞萨M16C62P单片机的倒立摆程序。这个程序完成后的成果有点类似如下视频:http://v.youku.com/v_show/id_XMzczMjgwMTI0.html
2013-01-30 00:38:42
最近需要设计单级倒立摆,可是对此一窍不通,有知道或者设计过的的大神么?求指导!!!
2014-03-22 18:50:20
地质大学2013年全国大学生电子设计竞赛简易倒立摆解析,很不错,赞一个
2014-08-01 15:07:02
倒立摆制作全过程最近在练习pid的控制算法,就选用了2013年的电子设计国赛题目:倒立摆。首先给你们看看我的成果注意哦:倒立摆不是靠上面黄色的传感器保持平衡的,而是通过下面的电机左右扭动使得摆杆不掉
2022-01-14 07:22:02
本帖最后由 qiuzhichang 于 2015-4-12 12:56 编辑
基于固高公司运动控制卡的倒立摆完整控制程序,包括括了界面、实时曲线显示、算法等
2013-09-06 09:08:22
求基于自由摆的平板控制系统的资料,谢了
2015-08-02 08:18:02
目录物理设置创建世界框架和基本配置组装底盘和推车摆放在一对手推车连接到摆选择用于控制器和角度转换的输出为摆锤和手推车创造原型闭环设置控制器实施物理设置在本节中,我们将展示如何使用Simscape
2021-07-07 06:16:10
同时控制小车的位置,实验观测不便等问题,提出并设计了基于固高公司起摆控制、最优小车位置控制、嵌入学生摆杆偏角控制的组合式控制系统。在线仿真实验表明,组合式控制系统对直线一级倒立摆的控制有效,能满足本科自动控制原理课程没计及实验的安全、自动、直观、迅捷、可靠的要求。
2020-04-01 07:11:00
怎么用单片机很好控制倒立摆呢
2015-08-01 15:38:31
1 绪论1.1倒立摆系统简介倒立摆系统是一种很常见的又和人们的生活密切相关的系统,它深刻揭示了自然界一种基本规律,即自然不稳定的被控对象,通过控制手段可使之具有良好的稳定性。倒立摆系统是一个非线性
2021-09-15 07:23:55
做毕设,想用stc89c51做倒立摆,再网上搜了很多资料都没找到,希望哪位大侠能帮帮我{:23:}{:19:}{:22:}
2014-05-02 19:41:25
旋转倒立摆数学建模的作用和在程序中怎样体现出来的
2015-07-21 23:33:25
有木有大侠旋转倒立摆的PID算法的MATLAB仿真原理图
2013-09-06 11:06:36
我想做倒立摆,可是有好多问题不懂,有没有大神指导一下
2014-05-15 17:22:04
有谁做过基于自由摆的平板控制系统交流交流、QQ: 651339660
2013-05-14 15:12:58
模糊控制倒立摆程序
2018-10-04 10:42:46
需设计基于单片机的单级倒立摆模糊控制系统设计!望大神指导
2014-03-26 17:04:32
#具体操作写好倒立摆程序的关键是确定pid算法的程序和参数值。我根据网上查找的资料写了用stm32F407控制倒立摆的pid程序,现在我将程序分享给大家。我的程序主要是根据位置式离散pid公式pwm
2022-01-14 07:33:37
一、倒立摆系统的研究目的和意义倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。倒立摆
2021-09-01 07:04:20
简易旋转倒立摆及控制装置中如何使直流电机加快转速?
2013-09-04 16:01:18
简易旋转摆倒立控制装置报告中的摆杆状态检测,是要测什么啊?!具体点
2013-09-05 10:10:13
萌新求助,求大佬分享一级倒立摆MATLAB仿真程序
2021-11-01 07:32:44
请问一下倒立摆系统的原理是什么?
2021-10-29 07:05:38
谁做过基于自由摆的平板控制系统!!!交流交流qq:651339660
2013-07-23 21:53:43
谁有2013年的倒立摆的相关资料,最好是430主控的,能提供一个,不胜感谢啦
2015-03-09 10:46:00
想学习倒立摆,谁有程序借来学习学习
2015-06-09 08:29:17
课程设计分析题目:风力摆控制系统一、 题目要求1.基本要求2.设计要求二.设计难点三.控制方案示意思路分析硬件选择一、主控1.选择一 STC15W408AS2.选择二 STM32F103C8T6二
2021-09-13 07:01:52
设计一个受风力驱动的自由摆控制系统,其结构如图 设计一个受风力驱动的自由摆控制系统,其结构如图 1所示。 直流电机 在单片控制下,带动叶片旋转,在风力作用下,摆转动,其角度 θ 与风力大小有关。
2014-03-22 19:02:41
本文以倒立摆控制系统控制为例,介绍Borland C++ Builder 在数据采集、处理中的应用,并根据系统控制算法控制电机左右运动,从而保证倒立摆能稳定地站立在竖直位置。关键词: C
2009-06-15 09:26:31 27
27 针对单级倒立摆系统的单输入双输出、强非线性、强耦合的不稳定系统,提出了双回路PID 控制方案。通过仿真试验研究了双回路PID 多种组合控制方案的可行性,并选出最佳方案——
2009-06-17 09:34:2833 本文介绍了一种基于SPCE061A 单片机的二级倒立摆控制系统。主要阐述了状态空间法在本系统中的应用以及功能设计,并简要介绍了系统的软件设计思路。关键词:单片机; 状
2009-08-04 08:42:0925 针对倒立摆的非线性采用T-S模糊控制的方法对倒立摆进行控制,建立了倒立摆的数学模型,并用Matlab 进行了仿真,仿真结果表明该控制方法对倒立摆具有好的控制效果。关键
2009-08-10 09:39:3215 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究对象是基于研华公司数据采集卡PCI—1710—B 的倒立摆控制系统。通过对一级倒立摆系统
2009-08-15 08:13:4525 选用 LabVIEW 作为倒立摆控制系统的界面设计开发工具。为了在LabVIEW 图形化编程环境下使用倒立摆控制器Windows 环境下的动态链接库,本文将动态链接库中的函数全部转换设计为在LabV
2009-08-26 09:40:3527 提出了利用TS-PID 对单级小车倒立摆进行控制的方法,并且对TS-PID 控制器进行了简要的理论分析,最后利用matlab 的simulink 工具对该控制系统进行了仿真,其结果表明该控制方法可行
2009-08-31 08:20:2720 倒立摆控制系统是一个典型的高阶次、不稳定、多变量、非线性和强藕合控制系统。本文研究分析了单节倒立摆控制系统的数学模型,介绍了线性二次型最优调节器(LQR)的基本原
2009-09-02 16:38:2724 倒立摆系统是多变量、非线性、强耦合的控制系统。采用模糊控制理论研究二级倒立摆控制问题。运用最优控制方法设计融合函数以降低模糊控制器的维数,减少模糊控制规则数,
2010-12-29 17:29:0846 引言
倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统可以用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、智
2009-01-01 21:05:33 712
712 
1引言
跷跷板系统是一个比倒立摆系统更为复杂,更接近于实际应用的典型控制系统。它具有严重的非线性、强耦合、对干扰敏感、模型过于复杂
2010-08-13 11:31:46933 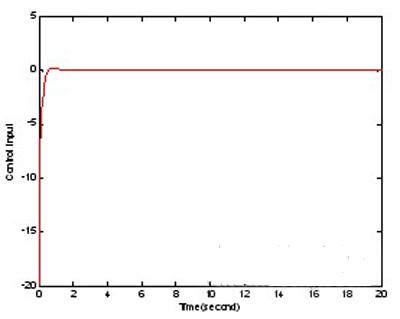
本文利用拉格朗日方程建立了直线一级倒立摆控制系统的数学模型,在此基础上分析了该系统的性能,并利用LQR控制器进行控制。结果表明,LQR控制器对该系统具有良好的控制作用
2011-03-31 10:38:327162 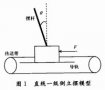
阐述了 倒立摆 实验系统及其在自动控制领域中的应用
2011-07-06 18:02:0353 针对 倒立摆 的起摆控制建立了环形单级倒立摆基于拉格朗日方程的运动方程,在此基础上提出了能量控制的概念,并将能量补偿控制应用在环形单级倒立摆系统上,仿真和实际控制结果表
2011-07-06 18:03:4967 在对 二级倒立摆 系统的动力学方程进行建模的基础上将其转化为线性定常系统的状态控制问题,提出了基于matlab的二级倒立摆控制系统
2011-07-06 18:05:25111 倒立摆 系统是一个复杂的!非线性的!不稳定的高阶系统 倒立摆的控制一直是控制理论及应用的典型课题分析了如何利用拉格朗日方程对直线柔性连接两级倒立摆系统建模采用法设计最优
2011-07-06 18:17:2242 倒立摆 系统是一个复杂的非线性系统本文建立了倒立摆的一种非线性数学模型在分析的基础上为倒立摆系统设计了一种模糊控制方案我们对一级倒立摆系统进行了控制取得了较好的效果
2011-07-06 18:19:4856 倒立摆系统是一种典型的控制系统模型,能够将实际与理论相结合,可以开发出新的控制算法来应用在系统模型之上。采用模糊控制算法研究二级倒立摆系统的控制问题,设计模糊控制
2012-08-29 15:04:08111 基于MATLAB的模糊控制倒立摆系统研究,感兴趣的可以下载看看。
2015-11-03 13:49:5836 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问
2015-12-11 11:06:5214 为进行性线控制器的设计首先需要对被控制系统进行建模.二级倒立摆系统数学模型的建立
2016-06-14 15:29:5616 本文介绍了一种简易环形倒立摆控制系统的设计实现
2016-08-23 16:27:2420 一级倒立摆的PID控制设计
2016-11-08 18:51:1664 基于变量分组模糊控制算法的倒立摆系统_魏胜男
2017-03-16 08:00:000 通过对一阶旋转倒立摆系统原理的分析,选用单片机作为控制器,直流电机作为执行器,电位器式角度传感器作为反馈环节,采用PID控制算法设计实现了一阶旋转倒立摆控制系统。实验结果表明该系统在稳定的基础上具有
2017-10-19 15:21:0957 倒立摆是典型的重上支下的系统,具有多个特点,包括不稳定性、快速多变性、耦合性等,其系统成本低廉、结构简单、便于进行实验室操作。而且倒立摆具有多种功能,能对控制系统进行检验、对机器人的行走和火箭发射
2017-11-09 14:50:5624 倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制
2017-11-27 16:36:0255222 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是控制理论发展中的一个典型问题。目前,通过倒立摆系统验证过的许多控制方法在航天、机器人以及一般工业过程领域均有着广泛的应用。如航天飞机的姿态控制
2018-02-04 11:25:280 针对存在模型参数不确定性和外部扰动的直线型二级倒立摆系统的稳摆控制问题,对如何实现倒立摆系统鲁棒稳定的同时,还保证其达到期望的最优控制性能和H性能指标的稳定性控制问题进行了研究。基于状态反馈
2018-03-06 14:11:581 摆系统控制上得到实现,而且当一种新的控制理论和方法提出以后,在不能用理论加以严格证明时,可以考虑通过倒立摆装置来验证其正确性和实用性。本文设计了基于单片机的得倒立摆控制系统,成本低廉,调试方便,能直观的观察控制效果,完成系统的调试任务,快捷的验证控制理论算法的正确与否。
2020-05-03 10:29:001255 
倒立摆作为一种典型的控制系统实验装置,具有非线性、自然不稳定等特性,常用来作为检验某种控制理论或方法是否合理的典型方案。一阶倒立摆系统能用多种理论和方法来实现其稳定控制,如PID、自适应、状态反馈、模糊控制及人工神经元网络等多种理论和方法都能在倒立摆系统控制上得到实现。
2022-02-10 11:46:563
 电子发烧友App
电子发烧友App










 工商网监
工商网监
评论