

















上位机具备强大而快速的运算能力,因而PID 算法、模糊控制算法、人工神经网络控制算法、遗传算法等各种控制策略都可以方便地实现。这里主要采用模糊控制算法。
3.2.1 调速算法
三相异步电动机模型是一个高阶非线性强耦合多变量的模型[1],进行控制时需要考虑多方面的因素。 例如转子的电压、频率、磁通,以及转子转速和位置等参量之间互相影响存在耦合,绕组存在电磁惯性, 转子存在机电惯性,转子的电阻值会随温度而变化,负载转矩、转动惯量等有可能出现各种随机扰动等。 这些因素的影响给控制带来了困难,仅采用经典的控制方法很难达到较高的精度要求。而模糊控制算法无 需被控对象的精确数学模型,且对被控对象的参数变化不敏感,鲁棒性强。因此将变频器和异步电动机看 作一个整体,采用模糊控制算法实现速度控制。
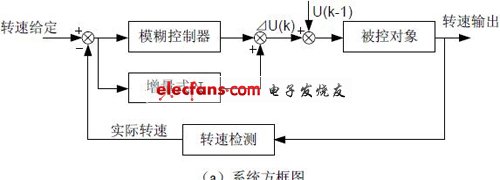
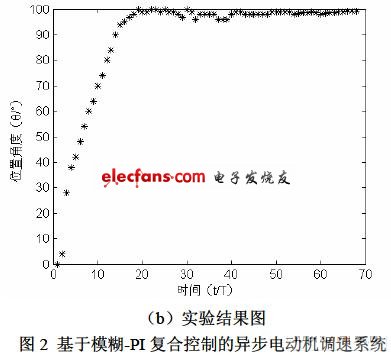
同时考虑到模糊控制器是一个有误差控制器,达到期望速度后的稳态阶段波动比较大。而采用PI控制, 当误差较小时有较高的稳态精度[2,3]。故而把增量式PI控制策略引入模糊控制器,构成模糊-PI复合控制,以 改善模糊控制器的稳态性能。基于模糊-PI复合控制的异步电动机调速系统如图2(a)所示,实验结果如图 2(b)所示(给定转速100 r/min,采样周期T=150ms,转速误差≤1.0 r/min)。
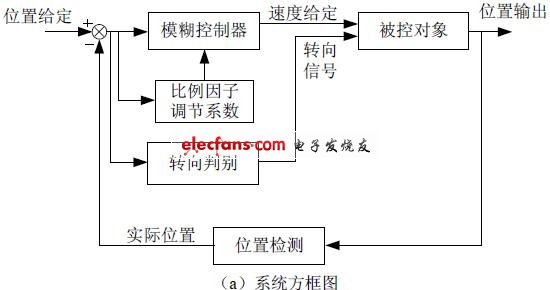

基于比例因子自调整的模糊控制系统如图 3(a)所示,实验结果如图3(b)所示(电机额定转速运 行时定位于0°,采样周期T=150ms,位置误差≤0.09°,即1 个计数脉冲的位置间隔)。
4 结语
本文基于PLC硬件平台,充分利用PLC自身资源,设计了异步电动机的速度和位置综合控制系 统。实验表明该系统达到了一定的控制精度,具有一定的实用参考价值。









 工商网监
工商网监
用户评论
共 0 条评论