

















恒流软启动最大的障碍,就是避免进入转矩和电流振荡。通常采用闭环的pid控制实现异步电动机的恒流软起动。交流电动机是高阶、非线性、强耦合的被控对象,所以普通的pid控制难以达到理想的控制效果,从而容易造成在轻载起动过程中发生转矩和电流的振荡。模糊控制不依赖于精确的数学模型,而且集结了有经验的专家的多年的控制经验,因而可以实现较理想的控制。其原理图如图4所示。

图4 控制原理图
选取起动电流偏差e和偏差变化率ec作为模糊控制器的输入量,e和ec均为精确的输入值,要采用模糊控制技术就必须把它们转换成模糊集合的隶属函数。
把e的变化范围设定为[-6,6]区间连续变化量,使之离散化,构成含13个整数元素的离散集合:{-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6}。e是在[0,ist]之间,通过变换:e=12/ist[x-(0+ist)/2],将在[0,ist]之间变化的变量x转换为在[-6,6]之间变化的变量e。同理,可将die/dt 的区间[0,20a/s]转换为[-6,6]之间变化的量c;δu的区间[0,0.1]转换为[-6,6]之间变化的量。然后取加权平均系数β=0.9, 根据:δu=βe+(1-β)ec即可得到e和ec一一对应的模糊规则表。
在实际运行中,通过上述转换后通过查表得到δu的模糊值,然后根据反模糊规则δu=uk×0.1/12+0.5,从而得到实际的输出电压u的值,通过移相触发确定触发角α。最后当启动完成后,bang-bang控制,关闭开关变压器的开关。
4 试验及结论
根据上述设计方案,进行了试验,被控对象为1140v/85a的感应电动机,其额定转速为970r/min。采用恒流软起动控制方案时的电流电压波形由图可见,图5为直接启动时的电流曲线,空间启动冲击较大;图6为1.5倍额定电流启动电流电压曲线,电压上升平稳,电流基本无冲击,效果比较理想。比较好的解决了转矩振荡引起的电流振荡问题。

图5 直接启动的电流曲线
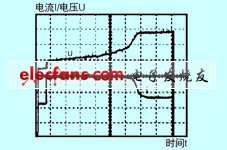
图6 1.5倍额定电流启动的电流电压曲线
5 结束语
本文首先分析了在电机启动过程中的功率因数角变化的问题,并把它作为一个参量考虑到变电压软启动中经常出现的转矩震荡和电流振荡问题。采用模糊控制算法,吸取专家经验,闭环反馈电流,有效的解决了恒流软启动中的振荡问题,得到了较理想的控制效果。









 工商网监
工商网监
用户评论
共 0 条评论