

















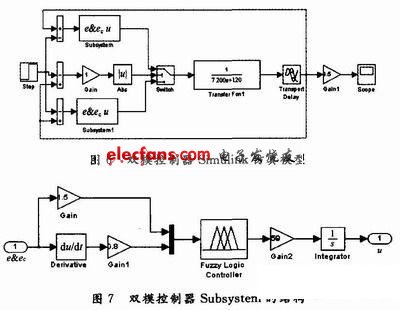
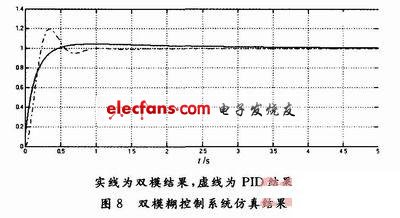
在Simulink环境下,建立模糊-PI双模控制器仿真系统结构见图6,图7,仿真结果如图8所示。双模系统稳定且消差的关键在各个参数的选择上,从仿真结果可以看出,双模糊控制系统的上升时间和最大超调量都有所减少,系统性能更好,使得控制器的性能得到较大的改善。
4 结论
本文提出的双模糊控制器当系统误差较大时,采用模糊控制器FC1进行控制,以达到快速响应,消除误差的目的,以获得良好的动态性能;当系统误差较小,采用模糊控制器FC2进行控制,从而达到极大地消除静态误差的目的,以获得较好的稳态性能。通过在Matlab/ Simu-link环境下的仿真研究可以看出,与传统的PID控制器和常规的模糊控制器相比,双模糊控制器能很好地解决前者上升时间长,超调量大的缺点,且在快速性、稳定性及准确性方面都有较大的改善。









 工商网监
工商网监
用户评论
共 0 条评论