

















随着目前生产自动化水平的提高,以及各种系统的需要,可编程控制器以其外部电路简单、模块化结构、可靠性高,尤其可以通过方便地编制和修改软件来实现顺序控制的功能等特点,在各行各业中得到了越来越广泛的应用。在各类数字和计算机系统中,都离不开多谐振荡器,虽然市场上有许许多多种多谐振荡器,但功能却各不相同。本文以日本三菱公司型号为FX2-24MR的可编程控制器为例进行程序设计,并仿真验证,设计了一款用可编程控制器构成的多谐振荡器。与普通振荡器相比,本设计有以下几方面优势:a.构成简单,具有通用性。改变程序和接线又可作其它用途;b.程序编写简单,易于理解和掌握;c.通过软件改变参数就可很方便地获得想要的频率和占空比。
1 设计
首先我们以一个具体工作任务为目标,看看整个多谐振荡器的设计全过程。该具体工作任务为设计一个频率为f=0.4Hz,占空比q=40%的多谐振荡器。
我们采用状态转移图SFC来实施这一工作任务。
(1)通过工作任务计算波形的周期T以及波形的高电平持续时间t1、低电平持续时间t2。周期按计算公式T=1/f=1/0.4=2.5s完成,t1和t2按占空比公式q=t1/(t1+t2)和t1+t2=T完成。将T=2.5s和q=40%代入到以上两个公式中,求解这个二元一次方程组,得到t1=1s,t2= 1.5s。
现在我们的工作任务变为要获得一个方波,它的高电平持续时间为1s,低电平持续时间为1.5S。即波形如图1所示。

(2)采用状态转移图SFC时,起始状态元件选择S0,中间状态元件选择S20。高电平持续时间继电器采用T0,低电平持续时间继电器采用T1,它们的时间参数根据规则分别设置为K10和K15。据此我们可以画出状态转移图SFC,如图2所示。
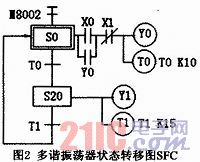
将状态转移图SFC变为可以实施的梯形图软件后,我们就可以将它写入到计算机里面去了。由图2的状态转移图得到的梯形图软件如图3所示。










 工商网监
工商网监
用户评论
共 0 条评论