

















那么对于我们这个机器人的简图,我们从哪里着手分析才合理呢?
首先,我们看一下设计任务书的内容。从任务书中知道,六个轴中有三个轴是做旋转运动的,其余作摆角运动。
结合任务书,我们看一下简图,是不是第1轴、第4轴和第六轴是做转动的,也就是说我们要检查一下我们所画的简图是不是与任务书中的要求相符合,符合了也就代表我们的设计思路与要求(客户要求)相同,可以进行下一步工作,如果不同,就得重新画简图。
从简图知道,机器人的手臂伸缩范围较大;如果把手臂全部伸直,而且我们假设地把它们看成同一钢体,这样就形成一端固定的悬臂梁。
应用力学知识体系中的有关梁的分析我们知道,要搞清悬臂梁的变形量,首先要知道梁的重量和截面惯量。
由简图知道,由于有多个关节连接,要知道截面形状和惯量不太容易,只有把所有的机构都设计完成后才会知道想求的参数。
由简图看出,第二轴担负着手臂的上下运动,而且手臂又比较长,在运动的过程中必然存在着惯性冲量,也就是说,当大臂的运动速度很慢时,惯性就很小;如果速度加快,惯性就加大,这个惯性冲量是与速度有着线性关系;怎样保持一定的速度,又不让惯性随着变化呢?大家都知道,增加阻尼,可有效消除这种关系。这样,大家就可以理解简图上两个弹簧的用意了。
即然是这样,那我们就从手腕开始设计。也说是大家所说的从上到下的设计方法。
设计手腕要考虑哪些问题呢?可以知道的是有一把焊枪,焊枪的重量不是很重,同时要有夹持焊枪的手爪。也就是说手腕在转动时的负载是不大的,选择驱动功率不大的元件就行了。
要让手腕在360度范围内转动,而且后面紧跟着又有一个上下摆动的关节;手腕又是在机器人手臂的最前端,当然总体质量不能太重。用什么样的机构最好呢?下面我们考虑几个方案:
1.如简图所示,采用行星齿轮传动。电机驱动太阳轮,行星轮绕太阳轮转动,内齿轮经行星轮减速与太阳轮反向运动,电机与太阳轮同轴安装。
2.多级齿轮减速传,电机安装于手腕一侧。
3.摆线针轮减速传动,电机与偏心轴同轴安装。
4.蜗轮蜗杆减速传动,电机有两种安装方式;一种与输出轴成90度安装,另一种与输出轴同轴线反向错位安装。
如上所述,还有很多种方式方法,到底选哪一种最好呢?这样我们就要做比较了。从上面的方案里看,第2种方法是不行的;第4种方法如果采用,手腕的结构就会很大,不利于机器人在运动时做精密定位。这样我们去除了两种方法,我们再比较一下第1种和第3种方法;
行星齿轮传动,传动比大,结构复杂,齿轮副配合有间隙,不能自锁。如果采用就得提高齿轮精度,由于是精密传动,齿轮材料也不能按常规齿轮选用材料,加工工艺相对常规齿轮相复杂的多。
摆线针轮传动,传动比大,结构复杂,传动间隙小,可以自锁。如果采用,手腕的尺寸不会太小,并且零件加工困难,精度不易保证。
比较各方面后,决定采用行星齿轮传动机械结构。行星齿轮在传动的过程中有装配间隙和机械磨损所造成的间隙;要消除这些机械间隙首先就要让齿轮副的配合间隙要小,齿轮材料经热处理后表面要耐磨,因此行星齿轮副的设计计算不能按常规行星齿轮的设计方法去计算。机器人的手腕是很灵活的关节,而且是要做正反两个方向的回转。怎么样安装电机是一个问题;行星齿轮传动机构与手腕俯仰关节连接是一个问题。
还有,手腕的运动速可能是非等速的;怎么样去控制电机?又怎么样去采集反馈信号?发出的控制信号到执行单元的过程中有没外部干扰?它来自哪里?
再有,就是手腕在运动过程中的精度;手腕在空间做相对运动,怎样去实现运动精度?影响运动精度的因素有哪些?
在设计手腕这前一定要搞清楚影响手腕的各方面的因素及内容,问题得到解答后再真正开始手腕的设计。
下面给出伺服电机的的技术参数:
型号:MSMD04ZS1V
额定输出功率:400W
额定转矩:1.3N.m最大转矩:3.8N.m
额定转速/最高转速:3000/5000rpm
电机惯量(有制动器):1.7×10-4Kg.m2
变压器容量:0.9KVA
编码器:17位(分辨率:131072).7线制增量式/绝对式。
适配驱动器型号:MBDDT2210
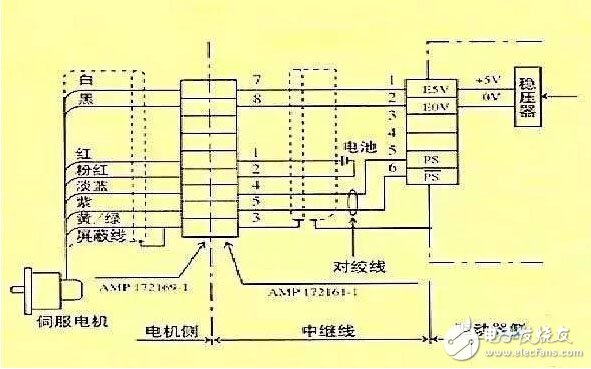
位置控制接线图:

17位增量式/绝对式编码器接线图:
即然我们选用了行星齿轮传动,那么我们就要进行行星齿轮的相关计算。
首先选定模数,由于机器人手腕部分结构要求尽量的小,输出的转矩也相应不是很大,但是,它却会在正反两个方向上存在着高速换向的可能,也就是说在换向时齿轮要克服很大的惯性力,因此,模数的选择计算要按输出转矩的数倍来计算,也就是说:在按强度计算模数时,安全系数选大些。同时由于结构的限制,尽量选用小模数。有关齿轮的计算公式大家可以查阅《齿轮设计手册》。这里我选用模数为:1m选定了模数,下面就要计算传动比,有关行星齿轮传动的计算大家可查阅《齿轮设计手册》或《机械设计手册》内的《齿轮传动部分》,里面有详细的介绍和计算范例。在此不作介绍和引用。
行星齿轮传动,必定有一个结构是浮动的,在机器人手腕部分是不是也适用呢?哪一部分做输了出?哪一部分浮动?
首先,机器人手腕做360度转动,结构又比较小,再者就是它的输出部分是要有一个法兰,用来安装夹持执行部件的。
如果让行星架浮动,行星齿轮分布在太阳轮圆周上,让它浮动时,在运转过程中它不是绕定轴转动,也就是说它不满足输出法兰的转动条件。
现在我们考虑一下让内齿转动,法兰固定在内齿轮上,这样就可以保证法兰的转动条件。
下面给出手腕的结构图,无浮动部件,内齿轮转动。










 工商网监
工商网监
用户评论(0)