 电子发烧友App
电子发烧友App


本项目介绍的是与之前几个项目的机器人一样,同样是采用太阳能脉动充放电控制电路。通过这些项目,我们可以再了解一种新的机器人驱动方式。

本项目机器人可以看成一个“太阳能风车”,风车转动的能量是风能,而“太阳能风车”转动的能量却是太阳能——有太阳的时候会转动,把太阳能转变为动能。本项目采用的同样是与之前几个项目一样的脉动充放电控制电路,运行的效果就是晒一会太阳充会电,然后转动一会,太阳越大转动越快;如果太阳足够火辣则可以几乎连续转动而中间没有停顿,而且这个时候会产生较大的震动,机器人整体也会发生移动,这有点类似2号蚊子的移动方式,看来作为亲戚还是有不少地方的相似的,呵呵。
1 基本原理
本项目的机器人采用太阳能电池作为电源,驱动电机带动一个转轴进行转动。
1.1 驱动原理
本项目机器人的驱动原理很简单,就是驱动电机旋转的传动方式,不过和通常的应用有点区别:一般的电机传动结构,电机是固定的,电机的轴是旋转的;而本项目的结构是正好相反,电机的轴是固定的,电机本身却是旋转的——电机的轴是固定在底座的,而电机和太阳能电池板、以及控制电路等都是和电机绑定在一起可以转动的,就是说除了一个固定的底座,其他部分都会跟着一起旋转。
1.2 机械结构
本项目采用的“电机轴固定、而电机本身旋转”的机械结构,其实效率并不如果“电机本身固定,而电机轴旋转”,毕竟这样电机转动时除了负担实际的负载之外,还要负担电机本身的重量。实际应用时一般不会采取这种方式,如果真的是作为太阳能风车,合理的方式应该是尽可能的减少驱动的负载,除了电机和控制电路等应该固定在底座不要跟着转动之外;同时还应该考虑太阳能电池板的安装角度,尽可能对着太阳以充分获得太阳能;实在不行至少应该固定太阳能电池板的安装角度,不至于说获得太阳能会那么不稳定(转到对着太阳的角度则效率高转得快,转到背着太阳的角度则效率低转得慢)。
本项目机器人之所以采用这样传动方式,主要是为了增加一个趣味性的效果,同时也作为介绍一种新驱动方式来拓宽视野而已。
此外,对于本项目机器人,让电机本身也一起转动,可以增加转动时整体的动能,让转动时产生的震动更大,而底座相对接触地面的面积尽可能小一点,就可以在转动速度比较快的时候机器人整体也会进行移动,而这个时候本项目也不再仅仅是一个固定的太阳能风车,而可以称得上是一个会移动的机器人(见视频中在灯光下快速转动时的效果),当然这个移动效果也不明显,效率也不高,所以本项目可以说有点不伦不类——低效率的太阳能风车,或低效率的移动机器人,可以说作为一种反面教材普及相关知识而已。
如果说作为移动机器人,为了让移动的效果更明显,就要增加转动时产生的震动。要产生更大的震动,除了说转动时带动更重的负载外,可以考虑用偏心轮的结构,就是说把除了电机上的其他绑定的负载(太阳能电池板、电路板等)都装在电机的一侧,而不是与电机同轴的位置,这个原理详见PVC-Robot 2号机器人的震动马达的原理(具体见: 晒太阳的蚊子·光能电机昆虫的移动原理 )。
不过,如果采用偏心轮的效果,会造成电机转动时的负载过大(转不动),在普通强度的太阳光下太阳能风车的效果就不是很好——转动太慢,转动角度太小。本项目机器人早期有一个设计版本就是属于偏心轮的结构,后来为了兼顾太阳能风车的效果(太阳不大的情况下也能转动得比较顺)所以被淘汰了。

新旧版本对比(左旧--右新)
另外,本项目如果从移动机器人来看,为了增加移动效果,还可以把底座的四只脚都装上一个小轮子,这样转动时产生的震动就可以让机器人移动的幅度更大,可以说这作为本项目机器人的扩展装备。

1.3 电路原理
本项目的电路与PVC-Robot 2号机器人项目的电路是一摸一样的,电路原理也是一摸一样的——典型的脉动充放电控制电路。
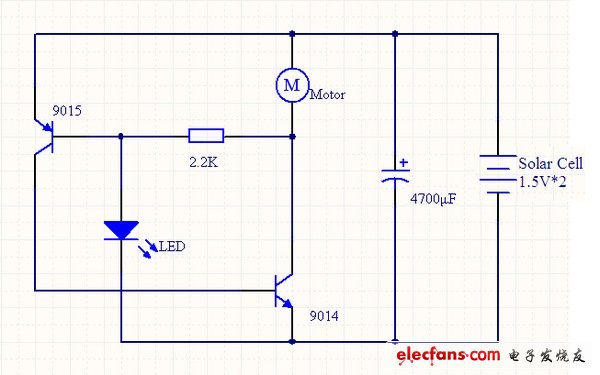
基本原理如下:
1)太阳能电池板给电解电容充电,电解电容两端的电压不断上升;
2)当电路电压达到LED二极管的导通电压(2V左右)时,LED二极管导通;
3)三极管9015的基极从导通的LED二极管获得足够的导通电压,则三极管9015导通;
4)三极管9015导通后,又使三极管9014的基极获得足够的导通电压,则三极管9014导通;
5)三极管9014导通后,电机获得电流开始转动;
6)电机转动,消耗电解电容中存储的电能,电路电压下降;
7)当电路电压下降到低于LED二极管的导通电压时,LED二极管截止;
8)虽然三极管9015的基极失去了来自LED的导通电压,但是由于此时三极管9014已经导通,导通后的电流除了提供给电机转动之外,还通过电阻分流了一部分重新回到三极管9015的基极(形成一个循环),即三极管的基极还是有足够的导通电压;
9)当电机继续转动消耗电解电容的电能时,电路电压进一步下降,则即便三极管9014导通后回流给三极管9015基极的电压也无法保证三极管9015继续导通(循环被破坏),则两个三极管都截止,电机停止转动;
10)电解电容重新充电,继续重复上面的各环节。
简单的说,即:太阳能电池对电解电容充电,当充电量达到由LED二极管设置的充电上限后,则电路开始瞬间放电提供给电机转动;虽然电机转动消耗电能使电压下降至低于LED二极管的下限,但是由于电路存在一个导通循环的机制,仍然会继续放电让电机转动,能够尽可能的把电解电容中存储的电能都消耗掉;消耗完电解电容中的电能后,重新由太阳能电池对其进行充电……如此循环往复。
也可以这样理解:太阳能电池对电解电容进行缓慢充电(太阳能电池的电流比较小),充电达到上限后对电机进行瞬间放电(电机的电流比较大);放电停止的下限比较低,可以比较彻底的把充电的电量消耗完。
在PVC-Robot 2号机器人的项目中已经对该电路原理进行了更详细的分析,这里不再重复。如果还有不清楚的,或者有兴趣继续了解的,戳这里 晒太阳的蚊子·光能电机昆虫的电路原理 。
2 准备工作
本项目需要的器材主要包括:PVC线槽、小型电机(马达)、太阳能电池、电阻、电解电容、二极管、三极管、螺丝/螺帽等。
电子电路是与前几个项目一样的太阳能脉动充放电控制电路,作为一个经典的电路基本上可以做成通用电路板,见下图,其中LED发光二级管这次选择黄色的。

以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。
主要的器材都可以从网上购买,我列出了一些淘宝上的网址,基本上我也是通过这个渠道进行采购的,供大家参考。
名称 规格 数量 采购预算/成本折算 来源 用途
| 名称 | 规格 | 数量 | 采购预算/成本折算 | 来源 | 用途 |
| PVC线槽 | 2.5CM宽度 | 1段 | 4元 / 0.5元 | 实体五金店 | 主要结构材料 |
| 小电机 | 微型马达 | 1个 | 3元 | 淘宝:morehave | 动力 |
| 太阳能电池 | 1.5V | 2片 | 2.2元 | 淘宝:zhiqiang588 | 电源 |
| 电阻 | 2.2K | 1个 | 8元 / 0.03元 | 淘宝:jxpjihao | 电子元件 |
| 电解电容 | 4700uf | 1个 | 0.4元 | 淘宝:东莞创博电子 | 电子元件 |
| 二极管 | LED发光二极管(红/黄/绿) | 1个 | 0.08元 | 淘宝:lc工作室 | 电子元件 |
| 三极管 | 9014、9015各1个 | 2个 | 4.5元 / 0.15元 | 淘宝:jxpjihao | 电子元件 |
| 电路板 | 电路板/实验板/万用板/洞洞板 | 1块 | 1.5元 | 淘宝:lm750811 | |
| 齿轮 | 模数M0.3,70T(轴径1mm) | 1个 | 2元 | 淘宝:morehave | 底座 |
| M1.2*5螺丝 | 1.2mm直径,长5mm | 4颗 | 4元/0.16元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M2*6螺丝 | 2mm直径,长6mm,平头 | 1颗 | 2元/0.02元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M1.2螺母 | 1.2mm内径 | 4个 | 15元/0.6元 | 淘宝:微型螺丝小王 | 固定PVC材料 |
| M2螺母 | 2mm内径 | 1颗 | 2元/0.02元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| 合计 | 48.68元/10.66元 |
3 制作过程
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
3.1 电路焊接
本项目机器人的控制电路与PVC-2号机器人项目是一样的,关于电路焊接的说明这不再重复,具体请参考 晒太阳的蚊子·光能电机昆虫的电路焊接 。

这是“电路板正面布局图”(无焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):

这是“电路板底面布局图”(有焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
3.2 四足底座
用剪刀把PVC线槽裁剪成如下的形状和尺寸,即两组双足支架。

把两组支架叠在一起,中间打一个孔,并把齿轮按下图所示装好。

这里之所以用这个齿轮,一方面是这个齿轮的孔径是1mm正好可以装上我们选择的轴径为1mm的电机;另一方面可以比较方便的把底座的两组四足支架固定在一起。
把两组支架用502胶水贴在齿轮上,并且把支架的前端剪小一点,并且用尖嘴钳折成如下图所示的样子。

3.3 太阳能电池
把两片太阳能电池板用双面胶布贴在一块PVC方条上,并且在方条中心打一个孔供M2*6的螺丝固定用。
因为太阳能电池板的背面有电极,所以只能对没有电极的一端进行固定,同时用金属线把两片太阳能电池板的正负电极焊接在一起,即把太阳能电池串联起来。


3.4 安装电机
用PVC线槽剪一个长方条,对比电机的长度和电路板的尺寸,折成如下图所示形状的支架。

把电机如下图所示用透明胶固定在长方条支架上。注意电机的轴要穿过方条支架上的小孔,同时方条支架的另一端用M1.2*5mm的螺丝如图所示固定好。

3.5 整机组装
把电路板通过M1.2*5mm的螺丝螺母安装到支架上,因为电路板的主要重量是电解电容,为了保证转动时摆动不要太大,注意电解电容应该与电机在同一个中心轴上。

把太阳能电池板的固定方条用M2*6的螺丝螺母安装到支架上。

把电机的轴插入底座的齿轮的孔中,整体组装在一起。


3.6 整机调试
完成整机组装后,需要进行调试。
首先,调试机械结构。可以在没有阳光的情况下,即在电路没有接通的时候,把机器人放置在水平的桌面上(底座着地),然后用手拨动太阳能电池板,手动让转轴转动起来,看看转轴是否能够转动得比较平滑,一般手工拨动可以让转轴转动几圈。如果发现转轴比较卡,转动不平滑,可以检查太阳能电池板支架的中心是否正好在电机转轴的中心线上,或者检查电路板的电解电容的中心也正好在电机转轴的中心线上。
然后,测试电路是否正常工作,可以在100W白炽灯光下测试电路的充放电控制是否正常,电机是否能够正常转动(见视频中在灯光下的效果)。

3.7 最终展示
最终的效果展示。



3.8 完善升级
为了增加移动效果,还可以把底座的四只脚都装上一个小轮子,这样转动时产生的震动就可以让机器人移动的幅度更大。
4 项目总结
本项目是一个以简单电子元件电路为控制基础的智能机器人。对于刚入门的朋友,可以通过这个项目:
1、加深脉动充放电控制电路在太阳能驱动应用方面的理解;
2、了解太阳能风车结构的原理以及应用;
3、动手制作太阳能风车。
本项目的机械结构也比较特殊,建议有条件的朋友可以试试手作为一次实践经历。












 工商网监
工商网监
评论