 电子发烧友App
电子发烧友App


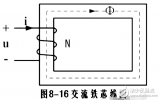
感应电动势是在电磁感应现象里面既然闭合电路里有感应电流,那么这个电路中也必定有电动势,在电磁感应现象中产生的电动势叫做感应电动势。在闭合电路中,因电磁感应现象而产生的电动势(电位差)称为感应电动势。感应电动势的计量单位为伏,用符号V表示。
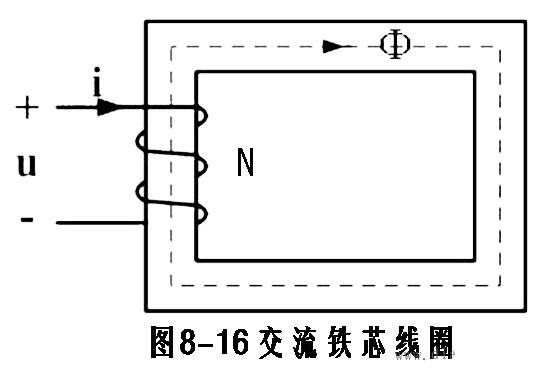
感应电动势的表达式为:E=0.44fΦN
式中E-感应电动势(V);
f-电流频率( Hz);
Φ-磁场的磁通量(Wb);
N-线圈的匝数。
感应电动势公式

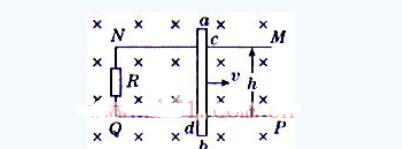
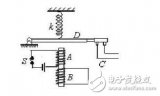
将一根直导线AB至于磁场中,并将该导线与测量电流的电流表相连(如右图),当导线AB从左向右与磁场作相对运动时,导线切割了磁力线,在AB导线中产生感应电动势,由于这是闭合电路,此电动势在回路中产生感应电流。所以电流表读数出现偏转。同时:如果导线AB从右向左运动,回路中也有感应电流,但电流表指针偏转方向会与前一种情况相反。但当导线AB平行于磁力线方向作上、下运动时,电流表的指针不会偏转。
此实验表明:只要导体切割磁力线,就有感应电动势产生。
实验还证明,在均匀磁场中,导线做作其他歌磁力线运动而产生的感应电动势的大小与磁感应强度B、导线长度L、导体运动的速度V、导体运动方向与磁场方向之间的夹角θ(念西塔)的正弦有关。其数据额表达式为:
![]()
上述公式中各符号代表的意思分别是:
B:表示均匀磁场的磁感应强度,单位(T、特)
L:导体长度,单位(m、米)
θ:磁场方向与导体运动方向之间的夹角,单位(°、度)
E:导体两端的感应电动势,单位(V、伏)
由上面的公式可知:当θ=90°是,此时E=BLV为最大值,而当θ=0°时,即导体沿着磁力线方向运动时,导体中感应电动势为零。
感应电动势的计算
1、一元件转过一极距所感应出的平均电动势![]() :
:
当元件轴线从某一主极轴线位置转到相邻主极轴线位置时,电枢转过的电角度为![]() ,与元件交链的磁通由
,与元件交链的磁通由![]() 变为-
变为-![]() ,若电机的电角速度为
,若电机的电角速度为![]() ,这一过程所经历的时间为:
,这一过程所经历的时间为:![]() ,电角度 =p×机械角度;机械角速度
,电角度 =p×机械角度;机械角速度![]() ,弧度/秒;电角速度
,弧度/秒;电角速度![]() , 弧度/秒;电机转速
, 弧度/秒;电机转速![]() , 转/分 。据
, 转/分 。据![]() ,一个匝数为
,一个匝数为![]() 的元件中感应电动势的平均值为:
的元件中感应电动势的平均值为:

2、一支路的总平均电动势![]() :
:
一支路串联元件数为![]() 则:
则:

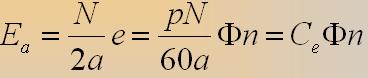
其中 ![]() 为电动势常数。可见,感应电动势与每极磁通和电枢转速的乘积成正比。特别,若不计饱和影响,
为电动势常数。可见,感应电动势与每极磁通和电枢转速的乘积成正比。特别,若不计饱和影响,
![]()
此时有: 感应电动势![]() 与励磁电流
与励磁电流![]() 和电枢机械角速度
和电枢机械角速度![]() 的乘积成正比。可得到
的乘积成正比。可得到![]() 与
与![]() 的关系:
的关系:![]() 。从电磁观点看,电动机通过电磁感应,从电源吸取电功率
。从电磁观点看,电动机通过电磁感应,从电源吸取电功率![]()
![]() ,转换成对机械负载所做的机械功率
,转换成对机械负载所做的机械功率![]()
![]() 。无论电动机,还是发电机,将这部分功率
。无论电动机,还是发电机,将这部分功率![]()
![]() 或
或![]()
![]() 称为电磁功率。
称为电磁功率。
感应电动势的大小计算公式
1、E=nΔΦ/Δt(普适公式){法拉第电磁感应定律,E:感应电动势(V),n:感应线圈匝数,ΔΦ/Δt:磁通量的变化率}
2、E=BLV垂(切割磁感线运动){L:有效长度(m)}
3、Em=nBSω(交流发电机最大的感应电动势){Em:感应电动势峰值}
4、E=BL2ω/2(导体一端固定以ω旋转切割){ω:角速度(rad/s),V:速度(m/s)}
感应电动势方向(或感应电流方向)与磁场方向、导体运动方向都有关系,他们之间的相互关系可用右手定则确定。

上面讲到用右手定则来确定感应电动势方向与磁场、导体方向之间的关系,而之前我们也学过一个右手定则,叫做安倍右手定则(也叫右手螺旋定则),他们之间在理解上是有一点差别。
此右手定则操作方法如右图所示:伸开右手,让磁力线垂直穿过掌心,使大拇指指向导体切割磁力线的运动方向,其余四指指向就表示感应电动势方向。如果电路时闭合的,它也是感应电流的方向(应注意的是,伸开右手后,大拇指应与其他四指在同一平面内,并相互垂直)。
发电机就是根据这一原理工作的,所以以前这个右手定则又称为“发电机定则”。
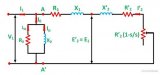
电枢绕组的感应电势是指电机正、负电刷间的电势。因此,无论是何种绕组,正、负电刷间的电势就是支路电势,而支路电势等于支路中各串联元件电势之和。电枢绕组的感应电势可用很多方法来求,在此,先求每个元件电势的平均值,再乘上支路元件数,即得支路电势。












 工商网监
工商网监
评论