横摆角速度和侧向加速度的综合控制 - 主动前轮转向控制技术研究
D*控制(或称为横摆角速度和侧向加速度的综合控制)源于四轮转向控制中对后轮转向的控制策略,是一种对车辆的横摆角速度和侧向加速度进行综合控制的方法。在该控制中,控制的反馈量不再只有横摆角速度,而是横摆角速度与侧向加速度的线性组合,如式(3)所示。
式中:Cy为侧向加速度,VY为车速与横摆角速度的乘积,两者量纲一致,从这里可以看出,D*控制是一种侧重于侧向运动控制的控制方法。
D*控制框图如图6所示,其中D*由理想车辆模型推出的与车速有关的比例系数与驾驶员输入的转角求得。CFF(s)为前馈控制传递函数,主要实现的是随车速改善车辆响应增益,CFS(s)为反馈控制环节,用来生成附加转角。
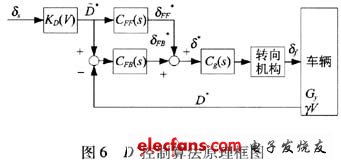
与横摆角速度反馈控制相比,D*控制可以进一步提高车辆的转向响应速度,在抑制扰动的同时,提高车辆轨迹跟踪的能力,在侧向运动要求比较高的工况下(如:低附着系数路面双移线,侧向阵风直线行驶)效果较好。
2.3 侧倾稳定性控制
在车辆行驶过程中,高速过弯、紧急避让和侧向阵风的干扰都有可能直接导致车辆侧翻,另外,重心偏高的车辆也特别容易发生侧翻。还有,当驾驶员对车辆的侧向稳定性做出错误估计时,也会导致车辆侧翻的发生。侧向加速度是影响车辆侧向稳定性的主要因素,通过主动转向可有效地影响车辆的侧向加速度从而控制车辆的侧倾。一般来说,车辆的防侧翻控制采用一个指示车辆侧倾状态的阙值,当检测到的侧倾状态超过阙值,则触发防侧翻控制。阙值可以是重心处的侧向加速度、车辆侧翻系数或者载荷转移系数等。
图7所示为基于主动转向和制动集成控制的控制系统图。图中只为侧翻系数,是由车辆的轮宽和簧载质量重心处的侧向加速度来求得。当,|R|<1时,意味着车辆侧向稳定,而当R=±1时,则意味着车辆左侧或右侧的车轮将抬离地面。该控制有两种模式,当|R|<0.9时,车辆正常行驶,控制系统处于连续操纵转向控制模式,附加转角根据对侧倾阻尼的优化策略产生,可以有效减小转向产生的侧倾,抑制处于车辆侧倾共振频带内的外界扰动。当,|R|≥0.9时,车辆处于侧倾危险状态,控制系统进入紧急转向控制模式,此时附加转角δR=kR(|R|-0.9),可以有效增大车辆转弯半径,同时系统进行一定的紧急制动操作,进一步降低车速,从而避免车辆发生侧翻。
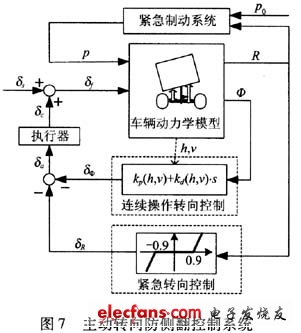
在主动转向防侧翻的控制中,由于附加转角的存在,会影响车辆按照驾驶员意图行驶的能力,因此控制策略中应由一个关于汽车行驶时车道保持能力的控制方法,如采用主动制动的方法。由于车辆侧翻的危害性比较大,因此这类控制一般都遵循了侧翻控制优先于车道跟随的原则。
2.4 可变转向传动比的控制
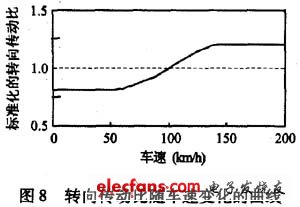
操纵稳定性实际上是一个人车路闭环系统的特性,操纵稳定性的好坏最终决定于驾驶员感受,因而在主动前轮转向的控制中,如何提高驾驶员操纵的安全性和舒适性也成为提高系统操纵稳定性的一个重要因素。在传统汽车上,从方向盘到车轮的传动比是一个定值。在低速时,车辆如在泊车停靠等工况下,或者由于障碍物而突然变道时,需要驾驶员大幅、快速操纵方向盘,增加了驾驶员的身体负担。相反,在高速时,由于车辆转向响应增益加大,较小的方向盘转角就会产生较大的侧向加速度,增加了驾驶员的精神负担。可变转向传动比可有效地解决上述问题。一般来说,变转向传动比控制中转向传动比的变化主要取决于两方面的因素:车速和方向盘转角。随着车速的升高,转向传动比增加,随着方向盘转角的增大,转向传动比减小,如图8所示。这样,可以使得驾驶员在低速时转向轻便而高速时操纵稳定。在目前的主动前轮转向控制中,许多控制算法都把可变转向传动比控制作为一个前馈环节,同反馈环节一起改善车辆的操纵稳定性。在机械式主动转向系统中,可变传动比是通过转角叠加的方式实现的,其输入、输出关系如下:
式中:Wsw为方向盘输入转角,Wring为主动齿轮输入转角,α1、α2为两者叠加的比例系数。
3 主动前轮转向动力学控制展望
由于车辆横摆角速度和侧向加速度通过轮胎的侧向力耦合,利用主动转向通过侧向力来改善车辆的操纵稳定性必然面临无法解决的矛盾,即侧向加速度与横摆角速度无法同时达到比较理想的优化状态。如何理解这一矛盾的性质以及如何实现车辆侧向运动和横摆运动的综合改善从而进一步提高车辆的操纵稳定性,将是需要我们深人思考和研究的问题。
由于轮胎本身存在侧向力饱和的情况,因此主动转向极限工况下作用非常有限。车辆的操纵稳定性不仅可以通过转向来影响,而且可以通过纵向运动(驱动、制动)的控制产生的直接横摆力矩来影响,同时,它还与车辆的悬架系统特性有着密切的关系。因此,主动前轮转向系统与各系统间的集成控制就成为未来的必然选择。通过集成控制,可以将各系统对操纵稳定性影响的优势充分发挥出来,最大限度地提高车辆在极限工况下的稳定性。目前,已经出现了一些主动前轮转向与其他系统的集成控制方案,比较多见的是主动前轮转向与直接横摆力矩控制的集成,以及主动前轮转向与主动悬架的集成等。
图9所示为主动前轮转向与直接横摆力矩控制的集成控制系统的控制算法框图。该控制系统可以提高车辆稳定性,拓宽极限行驶区域,减小转向幅度,更少产生由于制动干预引起的急剧减速,从而使车辆行驶安全性、舒适性得到大大提高。
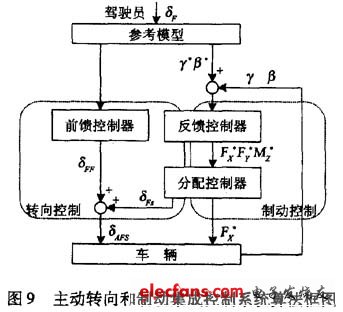
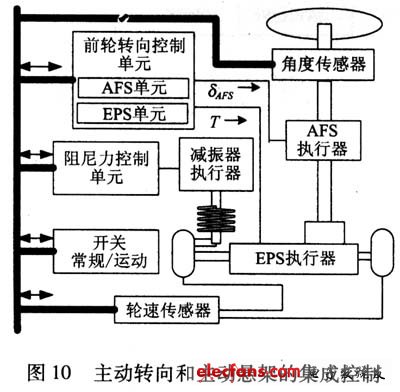
图10所示为丰田公司提出的一种主动转向和主动悬架集成控制结构。系统由前轮转向控制单元和阻尼力控制单元组成。分为正常模式和运动模式,通过一个开关来进行选择。在运动模式中,转向传动比更小,减振器的阻尼力大于正常模式。在两种模式下,转向力的感觉是相同的。
- 第 1 页:主动前轮转向控制技术研究
- 第 2 页:线控转向系统
- 第 3 页:横摆角速度和侧向加速度的综合控制
本文导航
非常好我支持^.^
(16) 100%
不好我反对
(0) 0%
相关阅读:
- [电子说] XC9290/XC9291系列降压DC/DC转换器简介 2023-10-19
- [机器人] 深度解析机器人控制技术背后的机械原理 2023-10-17
- [电子说] 控制技术是推动现代电机发展的重要动力 ——毕超博士出席浙江电机协会第9次 2023-10-10
- [电子说] OLED透明屏控制:引领未来交互技术的创新突破 2023-10-07
- [电子说] 变频空调和定频空调的区别 2023-09-15
- [电子说] 电气控制技术及低压电器元件概述 2023-09-08
- [电子说] 新一代电机控制技术的研发 2022-10-05
- [电子说] 信号隔离器智能化发明专利:一种模拟信号隔离传输及智能控制技术 2022-09-01
( 发表人:叶子 )