5.1.1 硬件电路与工作原理
1. 硬件电路
硬件电路同单元二中图2.1。
2. 工作原理
用手按动按键S3,每按键一次S3引脚上出现一个负脉冲,单片机计数一次,并实时将按键次数以BCD码方式,在发光二极管上面显示。
5.1.2 控制程序
1. 主程序流程图
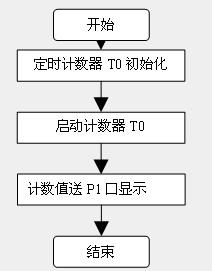
图5.1
2. 控制程序
ORG 0000H
LJMP MAIN
ORG 0030H
MAIN: MOV TMOD,#06H ;设定T0的工作方式
MOV TH0,#00H ;设定计数初值
MOV TL0,#00H ;
SETB TR0 ;启动计数器
MOV P1,TL0 ;送显示
END
5.1.3 源程序的编辑、编译、下载
打开“伟福”模拟仿真软件进行程序的编辑、编译。
打开“ISP下载软件”将目标文件下载到ISP-4实验开发板上的AT89S51单片机芯片,观察程序运行结果。
5.1.4 相关知识
1. 单片机是如何进行计数的?
本次任务中,单片机完成了对S3键按键次数的累计,那么,单片机是如何进行计数的?
在单片机的内部结构中,我们知道在MCS-51的单片机内有两个16位可编程的定时/计数器,它们具有四种工作方式,其控制字和状态均在相应的特殊功能寄存器中,通过对控制寄存器的编程,就可方便地选择适当的工作方式。下面我们对它们的特性进行阐述。
(1) 定时/计数器的工作方式
MCS-51单片机内部的定时/计数器的结构如图5.2所示,
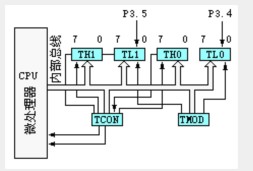
图5.2 MCS-51定时/计数器结构图
定时器T0特性功能寄存器TL0(低8位)和TH0(高8位)构成,定时器T1由特性功能寄存器TL1(低8位)和TH1(高8位)构成。特殊功能寄存器TMOD控制定时计数器的工作方式,TCON则用于控制定时计数器T0和T1的启动和停止计数,同时管理定时器T0和T1的溢出标志等。程序开始时需对TL0、TH0、TL1和TH1进行初始化编程,以定义它们的工作方式和控制T0和T1的计数。
TMOD和TCON这两个特殊功能寄存器的格式参见下表:
定时/计数器的方式控制字TMOD,字节地址为89H,其格式如表5.1:

表5.1 TMOD寄存器结构
定时器控制积存器TCON,字节地址为88H,位地址为88H—8FH,其格式如表5.2:

表5.2 TCON结构
TMOD和TCON各位的意义和用途我们将在下面的章节中予以介绍,需要注意的是,TCON的D0—D3位与中断有关,我们会在中断的内容中加以说明,MCS-51的定时/计数器共有四种工作方式,我们逐个进行讨论。
1) 工作方式0
定时/计数器0的工作方式0电路逻辑结构见图5.3(定时/计数器1与其完全一致),
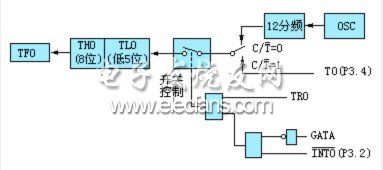
图5.3
工作方式0是13位计数结构的工作方式,其计数器由TH的全部8位和TL的低5位构成,TL的高3位没有使用。当 时,多路开关接通振荡脉冲的12分频输出,13位计数器以次进行计数。这就是定时工作方式。当=1时,多路开关接通计数引脚(To),外部计数脉冲由银南脚To输入。当计数脉冲发生负跳变时,计数器加1,这就是我们常称的计数工作方式。不管是哪种工作方式,当TL的低5位溢出时,都会向TH进位,而全部13位计数器溢出时,则会向计数器溢出标志位TF0进位。
时,多路开关接通振荡脉冲的12分频输出,13位计数器以次进行计数。这就是定时工作方式。当=1时,多路开关接通计数引脚(To),外部计数脉冲由银南脚To输入。当计数脉冲发生负跳变时,计数器加1,这就是我们常称的计数工作方式。不管是哪种工作方式,当TL的低5位溢出时,都会向TH进位,而全部13位计数器溢出时,则会向计数器溢出标志位TF0进位。
我们讨论门控位GATA的功能,GATA位的状态决定定时器运行控制取决于TR0的一个条件还是TR0和INT0引脚这两个条件。当GATA=1时,由于GATA信号封锁了与门,使引脚INT0信号无效。而这时候如果TR0=1,则接通模拟开关,使计数器进行加法计数,即定时/计数工作。而TR0=0,则断开模拟开关,停止计数,定时/计数不能工作。
当GATA=0时,与门的输出端由TR0和INT0电平的状态确定,此时如果TR0=1,INT0=1与门输出为1,允许定时/计数器计数,在这种情况下,运行控制由TR0和INT0两个条件共同控制,TR0是确定定时/计数器的运行控制位,由软件置位或清“0”。
如上所述,TF0是定时/计数器的溢出状态标志,溢出时由硬件置位,TF0溢出中断被CPU响应时,转入中断时硬件清“0”,TF0也可由程序查询和清“0”。
在工作方式下,计数器的计数值范围是:
1~8192(213)
当为定时工作方式时,定时时间的计算公式为:
(213-计数初值)×晶振周期×12
或 (213-计数初值)×机器周期
其时间单位与晶振周期或机器周期相同。
如果单片机的晶振选为6.000MHz,则最小定时时间为:
[213—(213—1)]×1/6×10-6×12=2×10-6(s)=2(us)
(213—0)×1/6×10-6×12=16384×10-6(s)=16384(us)。
2) 工作方式1
当M1,M0=01时,定时/计数器处于工作方式1,此时,定时/及数器的等效电路如图5.4所示,仍以定时器0为例,定时器1与之完全相同。
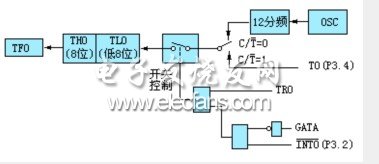
图5.4
可以看出,方式0和方式1的区别仅在于计数器的位数不同,方式0为13位,而方式1则为16位,由TH0作为高8位,TL0为低8位,有关控制状态字(GATA、、TF0、TR0)和方式0相同。在工作方式1下,计数器的计数值范围是:
1~65536(216)
当为定时工作方式1时,定时时间的计算公式为:
(216—计数初值)× 晶振周期×12
或 (216—计数初值)× 机器周期
其时间单位与晶振周期或机器周期相同。
如果单片机的晶振选为6.000MHz,则最小定时时间为:
[213—(216—1)]×1/6×10-6×12=2×10-6(s)=2(us)
(216—0)×1/6×10-6×12=131072×10-6(s)=131072(us)。
3) 工作方式2
当M1M0=10时,定时/计数器处于工作方式2.此时定时器的等效电阻如图5.5所示.我们还是以定时/计数器0为例,定时/计数器1与之完全一致。
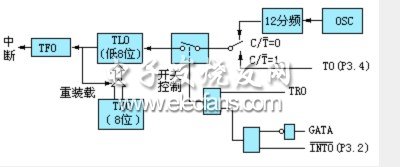
图5.5 定时器等效电阻
工作方式0和工作方式1的最大特点就是计数溢出后,计数器为全0,因而循环定时或循环计数应用时就存在反复设置初值的问题,这给程序设计带来许多不便,同时也会影响计时精度,工作方式2就针对这个问题而设置,它具有自动重装载功能,即自动加载计数初值,所以也有的文献称之为自动重加载工作方式。在这种工作方式中,16位计数器分为两部分,即以TL0为计数器,以TH0作为预置寄存器,初始化时把计数初值分别加载至TL0和TH0中,当计数溢出时,不再象方式0和方式1那样需要“人工干预”,由软件重新赋值,而是由预置寄存器TH以硬件方法自动给计数器TL0重新加载。
程序初始化时,给TL0和TH0同时赋以初值,当TL0计数溢出时,置位TF0的同时把预置寄存器TH0中的初值加载给TL0,TL0重新计数。如此反复,这样省去了程序不断需给计数器赋值的麻烦,而且计数准确度也提高了。但这种方式也有其不利的一面,就是这样一来的计数结构只有8位,计数值有限,最大只能到255。所以这种工作方式很适合于那些重复计数的应用场合。例如我们可以通过这样的计数方式产生中断,从而产生一个固定频率的脉冲。也可以当作串行数据通信的波特率发送器使用。
4) 工作方式3
当M1M0=11时,定时/计数器处于工作方式3,此时,定时/计数器的等效电路如图5.6所示,仍以定时器0为例,值得注意的是,在工作方式3模式下,定时/计数器1的工作方式与之不同,下面我们分别讨论。
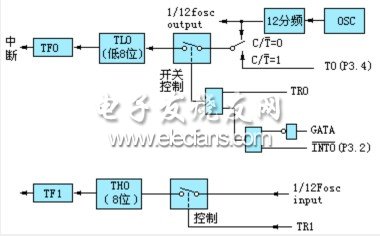
图5.6
在工作方式3模式下,定时/计数器0被拆成两个独立的8位计数器TL0和TH0。其中TL0既可以作计数器使用,也可以作为定时器使用,定时/计数器0的各控制位和引脚信号全归它使用。其功能和操作与方式0或方式1完全相同。TH0就没有那么多“资源”可利用了,只能作为简单的定时器使用,而且由于定时/计数器0的控制位已被TL0占用,因此只能借用定时/计数器1的控制位TR1和TF1,也就是以计数溢出去置位TF1,TR1则负责控制TH0定时的启动和停止。等效电路参见图5.7。由于TL0既能作定时器也能作计数器使用,而TH0只能作定时器使用而不能作计数器使用,因此在方式3模式下,定时/计数器0可以构成二个定时器或者一个定时器和一个计数器。
如果定时/计数器0工作于工作方式3,那么定时/计数器1的工作方式就不可避免受到一定的限制,因为自己的一些控制位已被定时/计数器借用,只能工作在方式0、方式1或方式2下,等效电路参见图5.7
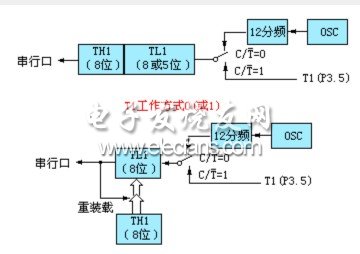
图5.7
在这种情况下,定时/计数器1通常作为串行口的波特率发生器使用,以确定串行通信的速率,因为已没有TF1被定时/计数器0借用了,只能把计数溢出直接送给串行口。当作波特率发生器使用时,只需设置好工作方式,即可自动运行。如要停止它的工作,需送入一个把它设置为方式3的方式控制字即可,这是因为定时/计数器本身就不能工作在方式3,如硬把它设置为方式3,自然会停止工作。
从前面的任务中,我们看到了,首先必须对定时计数器进行初始化,然后再开启定时或计数。简单的总结一下,定时计数器的初始化包括以下内容。
(1) 确定工作方式——对TMOD赋值;
如:任务中的MOV TMOD,#06H指令,设定T0为计数器工作方式。
(2) 预置定时计数器中计数的初值——直接写入TH和TL;
如:任务中的MOV TH0,#00H 两条指令,设定计数初值。
MOV TL0,#00H
(3) 根据需要开放定时器/计数器的中断——对IE位赋值;
(4) 启动定时器/计数器;
如:任务中的SETB TR0 指令
初值的计算方法
X=M-计数值
M是定时器的最大计数值。视工作方式不同而不同。
工作方式0: 13位定时/计数方式,因此,最多可以计到2的13次方,也就是8192次。
工作方式1: 16位定时/计数方式,因此,最多可以计到2的16次方,也就是65536次。
工作方式2和工作方式3,都是8位的定时/计数方式,因此,最多可以计到2的8次方,也说是256次。
预置值计算: 用最大计数量减去需要的计数次数即可。
通过上面的任务,我们掌握了计数程序的编制方法,下面我们再看看定时程序怎样编制。
首先我们看一下下面的程序段。
MOV TMOD,#01H
MOV TL0,#00H
MOV TH0,#4CH
SETB TR0
以上程序是任务一中的定时程序段,它的初始化过程和计数方式类似。