伺服电动机在自动控制系统中用作执行元件,用于将输入的控制电压转换成电机转轴的角位移或角速度输出,伺服电动机的转速和转向随着控制电压的大小和极性的改变而改变。
在自动控制系统中,对伺服电动机的性能有如下要求:
1.调速范围宽。
2.机械特性和调节特性为线性。
3.无“自转”现象。
4.快速响应。
伺服电动机有直流和交流两大类。直流伺服电动机输出功率较大,交流伺服电动机的输出功率较小。
一、直流伺服电动机
(一)结构
直流伺服电动机结构和原理与普通直流电动机的结构和原理没有根本区别。
按照励磁方式的不同,直流伺服电动机分为永磁式直流伺服电动机和电磁式直流伺服电动机。永磁式直流伺服电动机的磁极由永久磁铁制成,不需要励磁绕组和励磁电源。电磁式直流伺服电动机一般采用他励结构,磁极由励磁绕组构成,通过单独的励磁电源供电。
按照转子结构的不同,直流伺服电动机分为空心杯形转子直流伺服电动机和无槽电枢直流伺服电动机。空心杯形转子直流伺服电动机由于其力能指标较低,现在已很少采用。无槽电枢直流伺服电动机的转子是直径较小的细长型圆柱铁芯,通过耐热树脂将电枢绕组固定在铁芯上,具有散热好、力能指标高、快速性好的特点。
(二)控制方式
直流电动机的控制方式有两种:一种称为电枢控制,在电动机的励磁绕组上加上恒压励磁,将控制电压作用于电枢绕组来进行控制;一种称为磁场控制,在电动机的电枢绕组上施加恒压,将控制电压作用于励磁绕组来进行控制。
由于电枢控制的特性好,电枢控制中回路电感小,响应快,在自动控制系统中多采用电枢控制。
1.电枢控制方式下的工作原理与特性
在电枢控制方式下,作用于电枢的控制电压为Uc,励磁电压Uf保持不变,如图4-1所示。
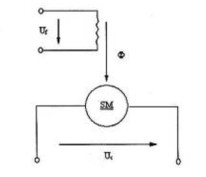
图4-1 电枢控制的直流伺服电动机原理图
直流伺服电动机的机械特性表达式为:

式中,Ce为电势常数;CT为转矩常数;Ra为电枢回路电阻。
由于直流伺服电动机的磁路一般不饱和,我们可以不考虑电枢反应,认为主磁通Φ大小不变。
伺服电动机的机械特性,指控制电压一定时转速随转矩变化的关系。当作用于电枢回路的控制电压Uc不变时,转矩T增大时转速n降低,转矩的增加与电动机的转速降成正比,转矩T与转速n之间成线性关系,不同控制电压作用下的机械特性如图4-2a所示。
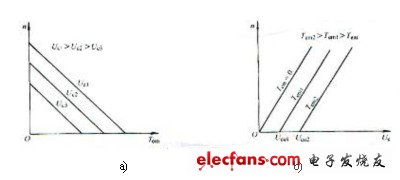
图4-2 直流伺服电动机的特性
a)机械特性;b)调节特性
伺服电动机的调节特性是指在一定的负载转矩下,电动机稳态转速随控制电压变化的关系。当电动机的转矩T不变时,控制电压的增加与转速的增加成正比,转速n与控制电压Uc也成线性关系。不同转矩时的调节特性如图4—2b所示。由图可知,当转速n=0时,不同转矩T所需要的控制电压Uc也是不同的,只有当电枢电压大于这个电压值,电动机才会转动,调节特性与横轴的交点所对应的电压值称始动电压。负载转矩TL不同时,始动电压也不同,TL越大,始动电压越高,死区越大。负载越大,死区越大,伺服电机不灵敏,所以不可带太大负载。
直流伺服电动机的机械特性和调节特性的线性度好,调整范围大,起动转矩大,效率高。缺点是电枢电流较大;电刷和换向器维护工作量大;接触电阻不稳定;电刷与换向器之间的火花有可能对控制系统产生干扰。
二、交流伺服电动机
(一)结构
交流伺服电动机在结构上类似于单相异步电动机,它的定子铁心中安放着空间相差90º电角度的两相绕组,一相称为励磁绕组,一相称为控制绕组。电动机工作时,励磁绕组接单相交流电压,控制绕组接控制信号电压,要求两相电压要同频率。
交流伺服电动机的转子有两种结构形式。一种是笼型转子,与普通三相异步电动机笼型转子相似,只不过在外形上更细长,从而减小了转子的转动惯量,降低了电动机的机电时间常数。笼型转子交流伺服电动机体积较大,气隙小,所需的励磁电流小,功率因数较高,电动机的机械强度大,但快速响应性能稍差,低速运行也不够平稳。
另一种是非磁性空心杯形转子,其转子做成了杯形结构,为了减小气隙,在杯形转子内还有一个内定子,内定子上不设绕组,只起导磁作用,转子用铝或铝合金制成,杯壁厚0.2~0.8mm,转动惯量小且具有较大的电阻,空心杯转子交流伺服电动机结构示意图如图4-3所示。杯型转子交流伺服电动机具有响应快、运行平稳的优点,但结构复杂,气隙大,空载电流大,功率因数较低。
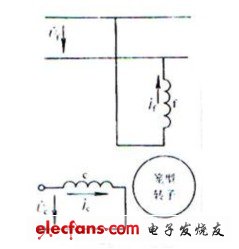
图4-3 空心杯转子交流伺服电动机结构示意图
(二)工作原理
交流伺服电动机的工作原理示意图如图4-4所示。
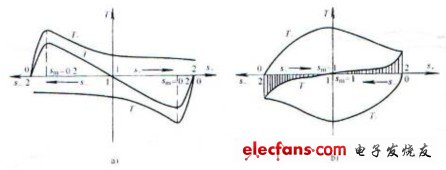
图4-4 交流伺服电动机工作原理示意图
交流伺服电动机励磁绕组和控制绕组在空间位置上相差90º电角度,工作时,励磁绕组通入恒定交流电压,控制绕组由伺服放大器供电通入控制电压,两个电压的频率相同,并且在相位上也相差90º电角度。这样,两个绕组共同作用在电动机内部产生了一个旋转磁场,在旋转磁场的作用下会在转子中产生感应电动势和电流,转子电流与旋转磁场相互作用产生电磁转矩,带动转子转动。
由第三章可知,在单相异步电动机中,当转子转动起来以后,断开起动绕组,电动机仍然能够转动。如果在交流伺服电动机中,控制绕组断开后,电动机仍然转动,那么伺服电动机就处于“自转”状态,这是伺服电动机所不能允许的。
如何消除伺服电动机的“自转”现象呢?只需要增加伺服电动机的转子电阻就可以了。当控制绕组断开后,只有励磁绕组起到励磁作用,单相交流绕组产生的是一个脉振磁场,脉振磁场可以分解为两个方向相反大小相同的旋转磁场。当转子电阻较小(临界转差率Sm<1)时,伺服电动机的机械特性如图4-5a所示,曲线T+为正向旋转磁场作用下的机械特性,曲线T−为反向旋转磁场作用下的机械特性,曲线T为合成机械特性曲线,可以看出,电磁转矩的方向与转速的方向相同,电动机仍然能够转动。当转子电阻较大(Sm≥1)时,伺服电动机的机械特性如图4-5b所示,曲线T为合成机械特性曲线,可以看出,电磁转矩与转速的方向相反,在电磁转矩的作用下,电动机能够迅速地停止转动,从而消除了交流伺服电动机的“自转”。
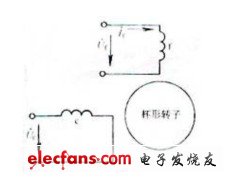
图4-5 交流电动机单相励磁时的机械特性
a) Sm<1时的机械特性;b) Sm≥1时机械特性
(三)控制方法
在交流伺服电动机中,除了要求电动机不能“自转”外,还要求改变加在控制绕组上的电压的大小和相位,能够改变电动机转速的大小和方向。
根据旋转磁动势理论,励磁绕组和控制绕组共同作用产生的是一个旋转磁场,旋转磁场的旋转方向是由相位超前的那一相绕组转向相位滞后的那一相绕组。改变控制绕组中控制电压的相位,可以改变两相绕组的超前滞后关系,从而改变旋转磁场的旋转方向,交流伺服电动机转速方向也会发生变化。改变控制电压的大小和相位,可以改变旋转磁场的磁通,从而改变电动机的电磁转矩,交流伺服电动机转速也会发生变化。
交流电动机的转速控制方法有幅值控制、相位控制和幅相控制三种:
(1)幅值控制
 则转速为0,电动机停转。幅值控制的接线如图4—6所示。
则转速为0,电动机停转。幅值控制的接线如图4—6所示。
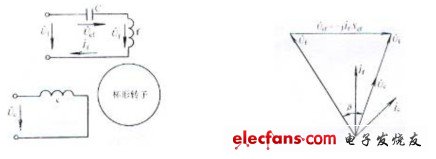
图4-6 幅值控制和相位控制方式接线图
(2)相位控制

图4-7 幅相控制的接线图 图4-8 幅相控制时的相量图
在这一种控制方式中,励磁回路中所接的电容在选择时要尽量使电动机起动时两相绕组产生的磁动势大小相等、相位差为90º,以保证电动机有良好的起动性能。
在三种控制方法中,虽然幅相控制的机械特性和调节特性最差,但由于这种方法所采用的控制设备简单,不用移相装置,应用最为广泛。