一、凸轮控制器的结构
凸轮控制器是一种大型手动控制电器,是起重机上重要的电气操作设备之一,用以直接操作与控制电动机的正反转、调速、起动与停止。应用凸轮控制器控制电动机控制电路简单,维修方便,广泛用于中小型起重机的平移机构和小型起重机提升机构的控制中。
图8-4为凸轮控制器的结构原理图。凸轮控制器从外部看,由机械结构、电气结构、防护结构等三部分组成。其中手轮、转轴、凸轮、杠杆、弹簧、定位棘轮为机械结构。触头、接线柱和联板等为电气结构。而上下盖板、外罩及灭弧罩等为防护结构。
当转轴在手轮扳动下转动时,固定在轴上的凸轮同轴一起转动,当凸轮的凸起部位顶住滚子时,便将动触点与静触点分开;当转轴带动凸轮转动到凸轮凹处与滚子相对时,动触点在弹簧作用下,使动静触点紧密接触,从而实现触点接通与断开的目的。
在方轴上可以叠装不同形状的凸轮块,以使一系列动触点按预先安排的顺序接通与断开。将这些触点接到电动机电路中,便可实现控制电动机的目的。

(a)结构外形图 (b)动作原理示意图
图8-4 凸轮控制器结构示意图
二、凸轮控制器的型号与主要技术参数
常用的国产凸轮控制器有KT10、KT12、KT14、KT16等系列,以及KTJ1-50/1、KTJ1-50/5、KTJ1-80/1等型号。凸轮控制器的型号及意义为:

凸轮控制器按重复短时工作制设计,其JC=25%。KT14系列凸轮控制器的主要技术参数见表,其中KT14-25J/1、KT14-60J/1型可用于同时控制两台绕线转子三相异步电动机,并带有控制定子电路的触点;KT14-25J/3型可用于控制一台笼型三相异步电动机的正反转;KT14-60J/4型可用于同时控制两台绕线转子三相异步电动机,定子电路由接触器控制。
表8-1 KT14系列凸轮控制器的主要技术参数
|
型号 |
额定电 压/V |
额定电 流/A |
工作位置 |
JC=25%时所控制的电动机最大功率/kW |
额定操作 频率/(次/h) |
最大工作 周期/min |
|
|
右旋 |
左旋 |
||||||
|
KT14-25J/1 |
380 |
25 |
5 |
5 |
11.5 |
600 |
10 |
|
KT14-25J/2 |
5 |
5 |
26.3 |
||||
|
KT14-25J/3 |
1 |
1 |
8 |
||||
|
KT14-60J/1 |
60 |
5 |
5 |
32 |
|||
|
KT14-60J/2 |
5 |
5 |
216 |
||||
|
KT14-60J/4 |
5 |
5 |
225 |
||||
三、凸轮控制器控制的线路
图8-5所示为采用凸轮控制器控制的10t桥式起重机小车控制电路。凸轮控制器控制电路的特点是原理图以其圆柱表面的展开图来表示。由图8-5可见,凸轮控制器有编号为1~12的12对触点,以竖画的细实线表示;而凸轮控制器的操作手轮右旋(控制电动机正转)和左旋(控制电动机反转)各有5个档位,加上一个中间位置(称为“零位”)共有11个档位,用横画的细虚线表示;每对触点在各档位是否接通,则以在横竖线交点处的黑圆点表示。有黑点的表示接通,无黑点的则表示断开。
图中M为小车驱动电动机,采用绕线转子三相异步电动机,在转子电路中串入三相不对称电阻器R2,用作起动及调速控制。YB2为制动电磁铁,其三相电磁线圈与M2(定子绕组)并联。QS为电源引入开关,KM为控制线路电源的接触器。KI0和KI2为过流继电器,其线圈(KI0为单线圈,KI2为双线圈)串联在M2的三相定子电路中,而其动断触点则串联在KM的线圈支路中。
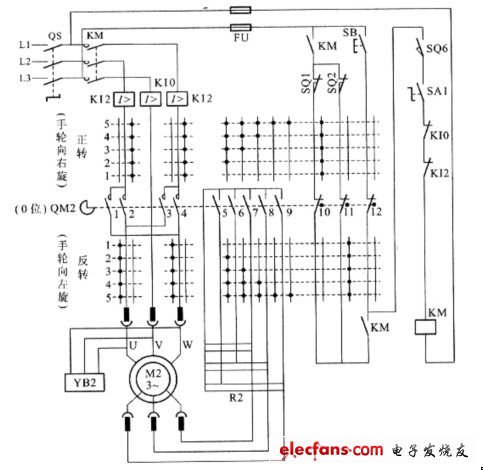
图8-5 凸轮控制器控制的线路图
(一)电动机定子电路
在每次操作之前,应先将凸轮控制器QM2置于零位,由图可见QM2的触点10、11、12在零位接通;然后合上电源开关QS,按下起动按钮SB,接触器KM线圈通过QM2的触点12通电,KM的三对主动合触点闭合,接通电动机M2的电源,然后可以用QM2操纵M2的运行。QM2的触点10、11与KM的动合触点一起构成正转和反转时的自锁电路。
凸轮控制器QM2的触点1~4控制M2的正反转,由图可见触点2、4在QM2右旋的五档均接通,M2正转;而左旋五档则是触点1、3接通,按电源的相序M2为反转;在零位时4对触点均断开。
(二)电动机转子电路
凸轮控制器QM2的触点5~9用以控制M2转子外接电阻器R2,以实现对M2起动和转速的调节。由图可见这五对触点在中间零位均断开,而在左、右旋各五档的通断情况是完全对称的:在(左、右旋)第一档触点5~9均断开,三相不对称电阻R2全部串入M2的转子电路,此时M2的机械特性最软(图8-6中的曲线1);置第二、三、四档时触点5、6、7依次接通,将R2逐级不对称地切除,对应的机械特性曲线为图8-6中的曲线2、3、4,可见电动机的转速逐渐升高;当置第五档时触点5~9全部接通,R2全部被切除,M2运行在自然特性曲线5上。
由以上分析可见,用凸轮控制器控制小车及大车的移行,凸轮控制器是用触点1~9控制电动机的正反转起动,在起动过程中逐段切断转子电阻,以调节电动机的起动转矩和转速。从第一档到第五档电阻逐渐减小至全部切除,转速逐渐升高。该电路如果用于控制起重机吊钩的升降,则升、降的控制操作不同。
1.提升重物
此时起重电动机为正转(凸轮控制器右旋),对应为图8-6中第Ⅰ象限的五条曲线。第一档(曲线1)的起动转矩很小,是作为预备级,用于消除传动齿轮的间隙并张紧钢丝绳;在二至五档提升速度逐渐提高(见图8-6第Ⅰ象限中的垂直虚线a)。
2.轻载下放重物
此时起重电动机为反转(凸轮控制器左旋),对应为图中第Ⅲ象限的五条曲线。因为下放的重物较轻,其重力矩TW不足以克服摩擦转矩Tf,则电动机工作在反转电动机状态,电动机的电磁转矩T与TW方向一致迫使重物下降(TW+T>Tf),在不同的档位可获得不同的下降速度(见图中第Ⅲ象限中的垂直虚线b)。
3.重载下放重物
此时起重电动机仍然反转,但由于负载较重,其重力矩TW与电动机电磁转矩T方向一致而使电动机加速,当电动机的转速大于同步转速n0时,电动机进入再生发电制动工作状态,其机械特性曲线为第Ⅲ象限第五条曲线在第Ⅳ象限的延伸,T与TW方向相反而成为制动转矩。由图可见在第Ⅳ象限的曲线1、2、3比较陡直,因此在操作时应将凸轮控制器的手轮从零位迅速扳至第五档,中间不允许停留,在往回操作时也一样,应从第五档快速扳回零位,以免引起重物高速下降而造成事故(见图中第Ⅳ象限中的垂直虚线c)。
由此可见,在下放重物时,不论是重载还是轻载,该电路都难以控制低速下降。因此在下降操作中如需要较准确的定位时,可采用点动操作的方式,即将控制器的手轮在下降(反转)第一档与零位之间来回扳动以点动起重电动机,并配合制动器便能实现较准确的定位。
(三)保护电路
图8-5电路有欠压、零压、零位、过流、行程终端限位保护和安全保护共六种保护功能。

1.欠压保护
接触器KM本身具有欠电压保护的功能,当电源电压不足时(低于额定电压的85%),KM因电磁吸力不足而复位,其动合主触点和自锁触点都断开,从而切断电源。
2.零压保护与零位保护
采用按钮SB起动,SB动合触点与KM的自锁动合触点相并联的电路,都具有零压(失压)保护功能,在操作中一旦断电,必须再次按下SB才能重新接通电源。在此基础上,由图8-5可见,采用凸轮控制器控制的电路在每次重新起动时,还必须将凸轮控制器旋回中间的零位,使触点12接通,才能够按下SB接通电源,这就防止在控制器还置于左右旋的某一档位、电动机转子电路串入的电阻较小的情况下起动电动机,造成较大的起动转矩和电流冲击,甚至造成事故。这一保护作用称为“零位保护”。触点12只有在零位才接通,而其他十个档位均断开,称为零位保护触点。
3.过流保护
如上所述,起重机的控制电路往往采用过流继电器作过流(包括短路、过载)保护,过流继电器KI0、KI2的动断触点串联在KM线圈支路中,一旦出现过电流便切断KM,从而切断电源。此外,KM的线圈支路采用熔断器FU作短路保护。
4.行程终端限位保护
行程开关SQ1、SQ2分别提供M2正、反转(如M2驱动小车,则分别为小车的右行和左行)的行程终端限位保护,其动断触点分别串联在KM的自锁支路中。以小车右行为例分析保护过程:将QM2右旋→M2正转→小车右行→若行至行程终端还不停下→碰SQ1→SQ1动断触点断开→KM线圈支路断电→切断电源;此时只能将QM2旋回零位→重新按下SB→KM线圈支路通电(并通过QM2的触点11及SQ2的动断触点自锁)→重新接通电源→将QM2左旋→M2反转→小车左行,退出右行的行程终端位置。
5.安全保护
在KM的线圈支路中,还串入了舱口安全开关SQ6和事故紧急开关SA1。在平时,应关好驾驶舱门,使SQ6被压下(保证桥架上无人),才能操纵起重机运行;一旦发生事故或出现紧急情况,可断开SA1紧急停车。

图8-6 凸轮控制器控制提升电动机机械特性