一、概述
(一)传感器的定义和分类
传感器是借助于检测元件接收一种形式的信息,并按一定规律将它转换成另一种信息的装置。它获取的信息可以为各种物理量、化学量和生物量,转换后的信息也可以有多种形式。目前的传感器大多为电信号,因此,从狭义上讲,传感器也可定义为把外界的输入信号转换成电信号的装置。
传感器是自动化系统中不可缺少的元件。它连接被测对象和测试系统,提供系统进行处理和决策所必需的原始信息。显然,一个自动化系统首先要检测到信息才能去进行自动控制,如果传感器不能获得信息,或者获得的信息不确切,或者不能把信息精确地转换成电信号,那么,要显示、处理这些信号就会非常困难,甚至没有意义。所以,传感器关系着一个测量系统或自动化系统的成败。
随着电子计算机、生产过程自动化、生物医学、环保、能源、海洋开发、遥感、遥测、宇航等科学技术的发展,从太空到海洋,从各种复杂的工程系统到日常生活的衣食住行,都广泛采用了各种传感器。
由于应用的对象、测量的范围、周围的环境等不同,需用的传感器也不一样,因此,传感器的种类很多。目前,传感器常用的分类方法有以下两种:
1.按被测物理量划分
(1)位移传感器
用于长度、厚度、应变、振动、偏转角等参数的测量。
(2)速度传感器
用于线速度、振动、流量、动量、转速、角速度、角动量等参数的测量。
(3)加速度传感器
用于线加速度、振动、冲击、质量、应力、角加速度、角振动、角冲击、力矩等参数的测量。
(4)力、压力传感器
用于力、压力、重量、力矩、应力等参数的测量。
2.按工作原理分
(1)电阻式传感器
利用移动电位器触点改变电阻值或改变电阻丝或片的几何尺寸的原理制成,主要用于位移、力、压力、应变、力矩、气流流速和液体流量等参数的测量。
(2)电感式传感器
利用改变磁路几何尺寸、磁体位置来改变电感和互感的电感量或压磁效应原理制成,主要用于位移、力、压力、振动、加速度等参数的测量。
(3)电容式传感器
利用改变电容的几何尺寸或改变电容介质的性质和含量,从而改变电容量的原理制成,主要用于位移、压力、液体、厚度、含水量等参数的测量。
(4)谐振式传感器
利用改变机械的或电的固有参数来改变谐振频率的原理制成,主要用于测量压力。
(5)电势型传感器
利用热电效应、光电效应、霍尔效应、电磁感应等原理制成,主要用于温度、磁通、电流、电压、速度、光强、热辐射等参数的测量。
(6)电荷式传感器
利用压电效应原理制成,主要用于力、加速度的测量。
(7)光电传感器
利用光电效应和几何光学原理制成,主要用于光强、光通量、位移等参数的测量。
(8)半导体传感器
利用半导体的压阻效应、内光电效应、磁电效应,与气体接触产生性质变化等原理制成,多用于温度、压力、加速度、磁场、有害气体和气体泄漏的测量。
本节只介绍SS4G、SS8型电力机车上使用的采用霍尔器件的磁场平衡式电流传感器、电压传感器和速度传感器。
(二)磁平衡式霍尔电传感器
磁平衡式霍尔电传感器是采用霍尔器件并引进瑞士LEM公司的技术--磁平衡原理制成的电传感器。这种传感器随着8K车技术的引进并国产化后,现已在国产电力机车上批量运用。它适用于电力机车控制系统和其它控制系统的要求,是一种很有发展前途的控制元器件。
1.霍尔器件的工作原理
载流导体在磁场作用下,两端会产生电位差 ,如图8-12所示。
,如图8-12所示。

图8-12 霍尔器件的工作原理
电位差的计算公式为
 (8-7)
(8-7)
利用霍尔电势的产生原理,现代科技已用半导体材料专门制成霍尔元件或称霍尔芯片,用于检测磁通。一般的霍尔芯片均有4根引线,其中2根引线为外加电压,提供电流,另2根引线为输出的霍尔电势。当外加电压恒定,电流 恒定时,输出的霍尔电势与磁场有良好的线性关系。
恒定时,输出的霍尔电势与磁场有良好的线性关系。
2.霍尔传感器的工作原理
霍尔传感器利用上述霍尔元件的工作原理,特别是输出霍尔电势与磁场的线性关系,并运用磁平衡技术而制成。
霍尔芯片置于聚磁铁心的气隙中。原边主电流回路所产生的磁场与副边电流回路产生的磁场方向相反,互相抵消,使霍尔芯片处于检测零磁通的状态。当主电路产生的磁场导致聚磁环中的霍尔芯片产生霍尔电压时,霍尔电压使得电子放大器相应的功率管导通,并根据霍尔电压的数值提供相应的补偿电流。副边电流产生的磁场抵消原边电流产生的磁场,直至霍尔电压为零,从而达到磁回路平衡,霍尔芯片又工作在零磁通状态。
这里,平衡的建立是在瞬间完成的,且平衡后又会出现新的不平衡,因此是一个瞬间的动态平衡过程。因磁路为零磁通,可以保证原边电流与副边电流是线性关系,测量副边数值就可得到原边主电流。
3.霍尔传感器的特点
基于上述原理,磁平衡霍尔传感器有着如下特点:
(1)可以测量任意波形的电流和电压,直流、交流脉动波形。因工作在零磁通状态,已不受磁饱和的影响,可以真实地反应各种原边电流的波形。
(2)原、副边电路隔离。
(3)精度高,对任意波形可做到优于1%的精度。
(4)线性度好,一般可做到优于0.1%。
(5)过载能力强,当原边电流过载(即达到饱和)时,可自动保护。
所以,该传感器特别适应于电力机车的控制。机车电流通常为脉流,除直流分量外,有脉动交流成分,以前的国产电力机车只能采用磁补偿式直流互感器,在测量精度、线性度、失真度、过载能力等方面均落后,而磁平衡式霍尔传感器的采用,大大提高了电力机车的控制水平,使机车能实现各种先进的控制方式。
SS4G型、SS8型电力机车上使用的电流、电压、速度、压力传感器见表8-6所示,现分别介绍如下。
表8-6 传感器在SS4G型、SS8型电力机车上的使用情况
|
序号 |
机型 |
电路代号 |
名 称 |
型 号 |
规 格 |
数量 |
|
1 |
SS4G |
1llSC 121SC 131SC 141SC |
检测电枢电流用电流传感器 |
TQG4A |
1 500A/10V |
4 |
|
2 |
199SC |
检测励磁电流用电流传感器 |
TQG4A |
1 500A/10V |
1 |
|
|
3 |
112SV 122SV 132SV 142SV |
检测电机电压用电压传感器 |
TQG3A |
1 500V/10V |
4 |
|
|
4 |
136SV 137SV 146SV 147SV |
PFC用电压传感器 |
TQG3A |
2 000A/80mA |
4 |
|
|
5 |
431BV 432BV 433BV 434BV |
速度传感器 |
CHS-GD-3 |
|
4 |
|
|
6 |
201BP |
辅助风缸压力传感器 |
CZYl |
|
1 |
|
|
7 |
202BP |
制动风缸压力传感器 |
CZYl |
300A/5A |
1 |
|
|
1 |
SS8 |
1~8SC |
电流传感器 |
TQG4A |
1 000A/200mA |
8 |
|
2 |
1SV 2SV |
电压传感器 |
TQG3A |
2 000V/80mA |
2 |
|
|
3 |
SDl SD2 SD3 SD4 |
速度传感器 |
DFl6双通道 2-200 |
|
4 |
二、电流传感器
电流传感器是一种通过霍尔发生器测磁来实现对各种电流进行测量的检测设备。它们串接在牵引电动机电枢回路或励磁回路中,将相应电流反馈信号输入到电子控制柜的相应信号插件。TQG4A型和TCSl型电流传感器原理基本一样,现以TQG4A型电流传感器为例介绍如下。
工作原理:TQG4A型电流传感器利用霍尔效应,采用磁补偿原理,通过霍尔元件实现对直流、交流及脉动电流的电隔离测量,输出信号正比于被测电流。
电流传感器中使用的关键器件是霍尔元件。如图8-13所示,霍尔元件加入适当的控制电流Ic后,在磁场方向不变的情况下,其输出电压U正比于所在磁场的磁通密度B。
当传感器一次侧NP流过待测电流IP时,在磁路中产生与IP成正比的磁通密度BP(IP∝BP),引起霍尔元件产生霍尔电势UB,该电势经运算放大器差分放大后,推动功放形成二次侧电流IS,该电流流过二次侧线圈NS,到测量取样电阻Rm。与此同时,流过二次侧线圈的电流IS也会在磁路中产生与IS成正比的磁通密度BS(IS∝BS),两磁场方向相反,引起磁路中总磁通密度减小,最终达到平衡,从而使处于该磁路中的霍尔元件工作在零磁通状态。整个过程是一个动态平衡过程,二次侧线圈中的电流IS(或测量取样电阻上的电压)真实地反映了待测电流IP。
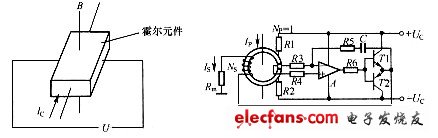
图8-13 TQG4A型电流传感器工作原理简图
为了增强对于外磁场的抗干扰能力,在TQG4A型电流传感器中采用了双霍尔元件,对称的两组线圈结构,输出并联。这样外磁场对霍尔元件的影响将在输出中得到抵消。
TQG4A型电流传感器主要技术参数见表8-8。
表8-8 TQG4A型电流传感器主要技术参数
|
型号 |
额定测量值 |
工作电源 |
额定输出 |
准确度 |
线性度 |
隔离电压 |
响应时间 |
|
TQG4A |
1 000A |
DC±24V |
200mA |
2.5% |
0.1% |
12kV |
≤1μs |
三、电压传感器
电压传感器安装在高压电器柜内,跨接在每台牵引电动机的两端,用来检测各电机的牵引电压大小,并将反馈信号输出到电子控制柜。TQG3A型与TSV1型电压传感器原理基本一样,现以TQG3A型电压传感器为例介绍如下。
工作原理:TQG3A型电压传感器中使用的关键器件是霍尔元件。霍尔元件加入适当的控制电流Ic后,在磁场方向不变的情况下,其输出电压U正比于所在磁场的磁通密度B。
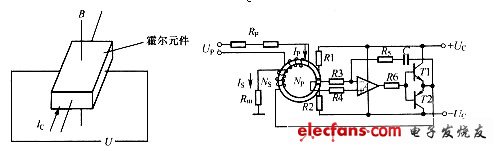
图8-14 TQG3A型电压传感器工作原理简图
在电压传感器中,参见图8-14,为了得到合适的原边磁场,首先将被测电压通过原边电阻降压,产生一次侧电流IP,再通过多匝NP一次侧线圈产生一次侧磁场,该磁场的磁通密度BP与被测电压成正比(UP∝BP),引起霍尔元件产生霍尔电势UB,该电势经运算放大器差分放大后,推动功放形成二次侧电流IS,该电流流过二次侧线圈NS,到测量取样电阻Rm。与此同时,流过二次侧线圈的电流IS也会在磁路中产生与IS成正比的磁通密度BS(IS∝BS),两磁场方向相反,引起磁路中总磁通密度减小,最终达到平衡,从而使处于该磁路中的霍尔元件工作在零磁通状态。整个过程是一个动态平衡过程,二次侧线圈中的电流IS(或测量取样电阻上的电压)同样真实地反映了待测电压UP。
TQG3A型电压传感器主要技术参数见表8-7。
表8-7 TQG3A型电压传感器主要技术参数
|
型号 |
额定测量值 |
工作电源 |
额定输出 |
准确度 |
线性度 |
隔离电压 |
响应时间 |
|
TQG3A |
2 000V |
DC±24V |
80mA |
5% |
0.1% |
7kV |
≤120μs |
四、速度传感器
1.SS4G型电力机车速度传感器
SS4G型电力机车采用FD型速度传感器与SD型速度表配套使用,指示机车运行速度、行走里程和时间。
SD型机车速度表
外形与安装尺寸见图8-15。
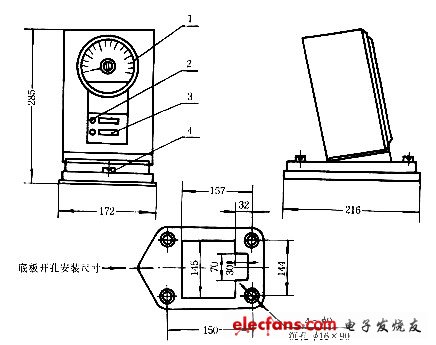
图8-15 SD型速度表外形及安装尺寸
1-速度显示;2-速度取样点指示灯;3-里程累计显示;4-安装螺钉。
(1)速度指示
SD型机车速度表所配用的速度传感器采用FD型永磁单相测速电机,此传感器装在机车轴箱上,通过机车轮轴轴头,驱动测速电机旋转,产生单相交流电压,经速度表内的速度控制板中的整流电路整流、滤波后,变成平滑直流电压,送入广角度直流毫安表。利用电机转速与电压的线性关系,在广角度电表上显示机车运行速度、轮径磨耗。其误差可通过调节速度显示电路的电位器来消除。
(2)里程累计
SD型速度表内装有一只DC24V六位里程电磁计数器。每当机车走行完1km,FD型测速电机的降速机构顶动内部的一只微动开关,使开关接通一次,速度表内的里程计数器通电吸合,推动字轮进位,实现机车公里数累计。
(3)时间显示
速度表上装有JS5-1电子计时器,它利用石英振荡器的振荡频率作为时间基准,采用三位的液晶显示器,可显示月、日、时、分、秒,用一节氧化银电池供电,具有精度高、显示清楚、使用方便等优点,电池使用寿命18个月。
FD型速度传感器
其外形及安装尺寸如图8-16所示。
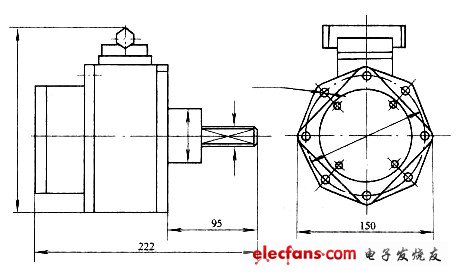
图8-16 FD型速度传感器外形图
(1)测速原理
FD型永磁单相测速电机是一只单相16极永磁测速电机。它通过拨动轴、传动簧使机车轮轴与电机轴软性连接,电机的转子由磁钢与一对极爪组成16个极,充磁方便,定子线圈有三档抽头选择电机输出电压值,磁路中有可调的磁分路装置,电机的输出电压可通过线圈抽头和磁分路来调节,所以,电机电压线性好、精度高、具有互换性。当机车的轮轴驱动电机旋转时,就会产生与电机转速成线性关系的单相交流电压,供电测量仪表进行速度、转速、显示与机车控制用。
(2)里程接点
FD型电机上部装有由二级蜗轮、蜗杆减速、偏心轮装置和微动开关组成的里程减速机构。当机车轮轴走行1km时,经蜗轮、蜗杆减速,偏心轮转动,顶动微动开关一次,里程开关信号进入SD型速度表内的里程计数器,累计机车走行公里。减速机构中,蜗轮的齿数根据机车轮径的大小决定,偏心轮装置保证机车无论前进、后退均能输出里程开关信号。
(3)主要技术参数
测量范围…………………………………………………………………0~1 000r/min
电压允许误差 ………………………………………………AC(32±0.2)V(800r/min)
电机的线性允许误差………………………………………………………………±0.3V
电机旋转方向…………………………………………………………………………任意
工作方式 ……………………………………………………………………………连续
结构形式 ………………………………………………………………………封闭自冷
里程接点 ………………………………………每公里开关通断一次(根据轮径定货)
工作条件: ………………………………………………………………………………
环境温度:-20℃~+50℃
相对湿度:不大于85%(+25℃)
电机寿命 …………………………………………………………………………5 000h
质量……………………………………………………………………………………6kg
(4)使用、维护与检验
①速度表与FD型速度传感器需编号对应使用,传感器铭牌上的轮径数应与速度表铭牌上的轮径数相符,电表指针应调到机械零位,电机传动轴转动必须灵活。
②速度表与机车控制电路的连线必须牢固,不得有断线、短路现象。电机安装在机车轴箱上,传动轴通过传动机构与机车轮轴联接,其安装必须牢固可靠,电机接线盒内接线不得有断线、短路等现象。
③测速发电机使用半年后,应检查各传动零件和电机零件的工作状况,如有磨损应给予更换。更换后,组装时应清洗零件和重新润滑。电机电压的测定在速度表试验台上进行,采用阻抗不小于10MΩ、精度不低于0.5级的数字交流电压表测定。电压不符合技术要求时必须进行调整。调整完毕应用锁片自锁,防止调节螺钉松动。
④速度表与传感器每使用3个月应在速度表校验台上进行一次速度和转速、速度取样点校验。速度表表头与传感器的校验工作在专用校验台上进行。校验时根据机车的实测轮径进行计算。
2.SS8型电力机车速度传感器
SS8型电力机车在四个车轴轴端安装了CS·GDDFl6型光电速度传感器,它们将机车车轴转速量变换为脉冲量,输出脉冲信号,进入接线盒,再由接线盒送入微机柜,对机车进行特性控制和防空转、防滑行保护。其外形如图8-17所示。
(1)主要技术参数
测速范围……………………………………………………………………0~200km/h
每转脉冲数………………………………………………………………………200P/R
输出通道…………………………………………………………………………双通道
输出波形……………………………………………………………………………方波
输出幅度………………………………………………高电平≈12×RL/(1 000+RL)V
低电平≤0.5V(负载能力≤10mA)
脉冲占空比…………………………………………………………………50%±10%
双路输出时的脉冲相位差…………………………………………………90°±45°
工作电源 …………………………………………………………DCl5V(14.25~20V)
DC24V(21~30V)
功耗电流 …………………………………………………………小于40mA(每通道)
绝缘强度 ………………………………………………1kV、50Hz交流正弦波1min
(出线端对外壳)
温度范围………………………………………………………………-40℃~+70℃
耐振性能……………………………………………20g/50Hz垂向、纵向、横向2h
密封性 ………………………………………………………………………承受风雨
质量 ……………………………………………………………………………2.5 kg
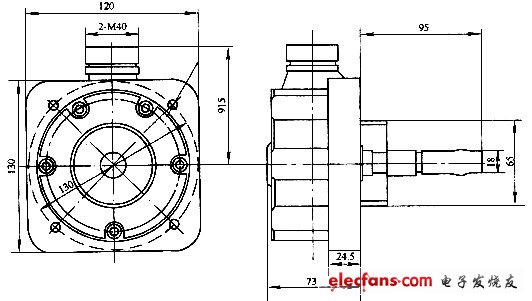
图8-17 CS·GDDF16型光电速度传感器外形图
(2)结构及工作原理
CS·GDDFl6型光电速度传感器由红外发射、光栅、光电接收、放大整形、双套彼此隔离的电路通道、外壳、传动轴、软性连接器、6芯防水插头座及附件连接导线组成。当机车的轮轴驱动传感器旋转时,传感器将机车速度转换,产生为f=n×p/60(p为每转脉冲数)的方波脉冲。
(3)CS·JH-6型光电传感器接线盒
靠近每个车轴的车体上装有与该速度传感器配套的CS·JH-6型光电传感器接线盒,其外形如图8-18所示。
CS·JH-6型光电传感器接线盒主要技术参数如下:
输入信号与输出信号关系……………………………………………………直接耦合
配光电传感器参数…………………………………………DFl6型、双通道、200P/R
使用环境…………………………………………………………………-40℃~+70℃
耐振性能……………………………………………20g,50Hz,x、y、z三方向各2h
绝缘强度 ………………………………………………500V、50Hz交流正弦波1min
密封性…………………………………………………………………………承受雨雪
质量 ………………………………………………………………………………1.5kg
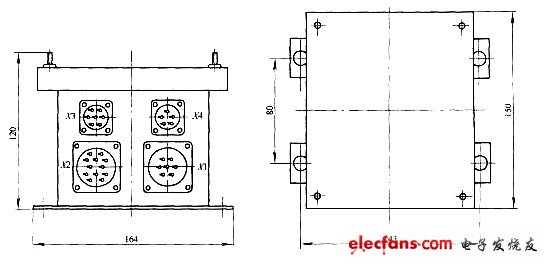
图8-18 CS·JH-6型光电传感器接线盒
CS·JH-6型光电传感器接线盒接线原理如图8-19所示。光电传感器输出的方波脉冲信号,由插头座Xl输入,经过接线盒内电路变换,将输入的二路200P/R方波脉冲信号,分别由插座X3、X4输出,便于机车电子控制系统接口。
SS8型电力机车四个车轴的速度传感器产生的脉冲信号,其中一个通道4个脉冲信号都送入微机柜,供微机控制。第一轴的另一通道送入轮缘润滑装置,第二轴的另一通道送入LKJ-93型机车运行速度监控装置,第三轴的另一通道送入数模转换盒,第四轴的另一通道备用。

图8-19 CS·JH-6型光电传感器接线盒接线原理
(4)使用注意事项
①传感器作用时,传动轴转动要灵活。
②传感器工作电源DC15 V、24 V,不允许接机车蓄电池,应接机车电子控制系统中的DC/DC变换器的副边输出(原、副边应全隔离),电源负端不允许接机车外壳。
③传感器、接线盒型号要相匹配,安装要牢固可靠。
④传感器使用半年,应在0~200km/h的标准转速源上,接入工作电源,输出端外接示波器,驱动传感器,对输出波形、幅度、相位差进行检验。
⑤严格按接线盒接线图进行外部配线,接线正确无误,连接不允许断路及短路现象,所有插头必须拧紧。
⑥传感器、接线盒应贮存在0~40℃,相对湿度不大于80%的清洁环境中。