使用专门的MCU简化运动控制设计
大小:0.33 MB 人气: 2017-05-09 需要积分:0
使用专门的MCU简化运动控制设计
数字运动控制方法提供精确的机器人和致动器的驱动端部效应器在机器人系统的运动和定位的调节。然而,在实践中,工程师开发基于传统的比例积分(PI)控制器的运动控制系统通常会发现他们的项目停滞不前,因为他们挣扎调整敏感的控制器参数。一个更有效的方法降低了调谐的复杂性,同时提供稳定的性能,在宽范围的操作条件。
低成本,高性能的微控制器已经推动了数字电机控制的迅速出现,能够通过软件控制响应广泛的操作条件。通过设计PI控制器的软件,工程师可以创建高响应的电机控制系统的最低数量的组件。然而,在实践中,找到最佳的PI控制器参数设置显着的挑战。很多时候,工程师们发现,每个电机的独特特性(以及相关的电机控制系统的实施)显着复杂的任务,以确保稳定运行的电机在不同的速度和负载。因此,电机控制开发团队发现自己被迫延长项目进度和解决微妙的调整问题。
PI controller challenges
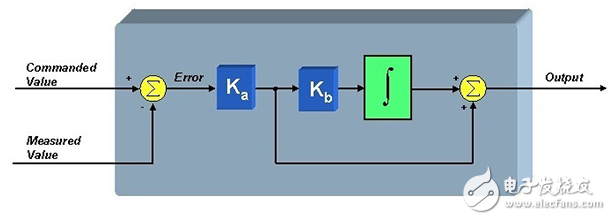
A conventional PI controller uses a control loop that generates an output intended to reduce the error between intended values and measured values in some process. In the serial form of the control loop (Figure 1), Kb sets the zero of the PI controller while Ka sets the bandwidth of the closed-loop system response.
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
下载地址
使用专门的MCU简化运动控制设计下载
相关电子资料下载
- 贴片式SD卡功能介绍【MK SD NAND】 54
- 瑞萨RX MCU功能安全解决方案简介(3)Self-Test自检软件包 484
- 瑞萨RX MCU功能安全解决方案简介 硬件参考板 222
- 瑞萨RX MCU功能安全解决方案简介 参考文档 155
- “万能管脚”拯救停产料 42
- 基于瑞萨MCU RA6M5的给药系统解决方案 120
- 芯海科技车规MCU芯片CS32F036Q荣获IAEIS 2024“年度汽车电子科学技术奖” 39
- 爱普特携新品亮相宁波家电展会,助力智能家电产业全芯升级 134
- 14年增长10倍!中国汽车半导体市场增长迅猛,英飞凌汽车芯片助力汽车新品上 1951
- 凌鸥创芯空调外机解决方案支持市场上主流的家用/商用空调外机 306