机器人定位技术优劣分析
2017-05-09 12:30 发布于 技术干货转自:SLAMTEC思岚科技
自主定位导航是机器人实现智能化的前提之一,是赋予机器人感知和行动能力的关键因素。如果说机器人不会自主定位导航,不能对周围环境进行分析、判断和选择,规划路径,那么,这个机器人离智能还有一大截的差距。那么,在现有SLAM技术中,机器人常用的定位导航技术有哪些呢?
视觉定位导航
视觉定位导航主要借助视觉传感器完成,机器人借助单目、双目摄像头、深度摄像机、视频信号数字化设备或基于DSP的快速信号处理器等其他外部设备获取图像,然后对周围的环境进行光学处理,将采集到的图像信息进行压缩,反馈到由神经网络和统计学方法构成的学习子系统,然后由子系统将采集到的图像信息与机器人的实际位置联系起来,完成定位。
优点:
应用领域广泛,主要应用于无人机、手术器械、交通运输、农业生产等领域。
缺点:
图像处理量巨大,一般计算机无法完成运算,实时性较差;
受光线条件限制较大,无法在黑暗环境中工作。
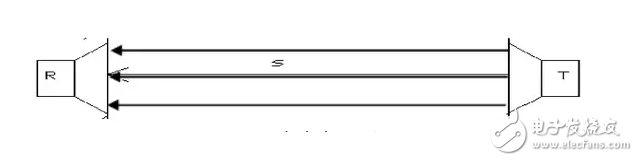
超声波定位导航
超声波定位导航的工作原理是由超声波传感器发射探头发射出超声波,超声波在介质中遇到障碍物而返回接收装置。通过接收自身发射的超声波反射信号,根据超声波发出及回波接收时间差及传播速度,计算出传播距离S,就能得到障碍物到机器人的距离,即有公式: S=Tv/2 式中,T—超声波发射和接收的时间差;v—超声波在介质中传播的波速。
=
优点:
成本低廉;
可以识别红外传感器识别不了的物体,比如玻璃、镜子、黑体等障碍物。
缺点:
容易受天气、周围环境(镜面反射或者有限的波束角)等以及障碍物阴影,表面粗糙等外界环境的影响;
由于超声波在空气中的传播距离比较短,所以适用范围较小,测距距离较短。
采集速度慢,导航精度差。
红外线定位导航
红外线定位导航的原理是红外线IR标识发射调制的红外射线,通过安装在室内的光学传感器接收进行定位。
优点:
远距离测量,在无反光板和反射率低的情况下能测量较远的距离;
有同步输入端,可多个传感器同步测量;
测量范围广,响应时间短。
缺点:
检测的最小距离太大;
红外线测距仪受环境的干扰较大,对于近似黑体、透明的物体无法检测距离,只适合短距离传播;
有其他遮挡物的时候无法正常工作,需要每个房间、走廊安装接收天线,铺设导轨,造价比较高。
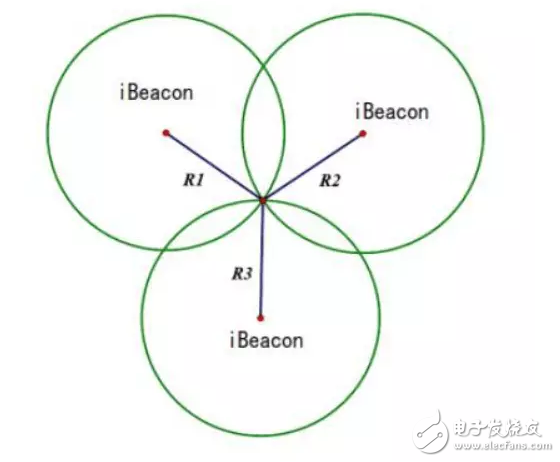
iBeacon定位导航
iBeacon是一项低耗能蓝牙技术,工作原理类似之前的蓝牙技术,由Beacon发射信号,蓝牙设备定位接受,反馈信号。当用户进入、退出或者在区域内徘徊时,Beacon的广播有能力进行传播,可计算用户和Beacon的距离(可通过RSSI计算)。通过三个iBeacon设备,即可对其进行定位。
优点:
定位精度比传统的GPS高,可从一米到几十米;
功耗小、时延低、成本低、传输距离远。
缺点:
受环境干扰大,信号射频不太稳定;
安装、开发和维护方面均存在需要克服的难点,使用时保证设备信号不被遮挡。
灯塔定位导航
灯塔定位导航技术在扫地机器人领域使用的比较多。导航盒发射出三个不同角度的信号,能够模拟GPS卫星三点定位技术,让其精准定位起始位置和目前自身所在坐标,导航盒如同灯塔,其作用为发射信号,引导机器人进行移动和工作。
优点:
引擎稳定性高,路径规划可自动设置
缺点:
灯塔定位没有地图,容易丢失导航;
需要充电桩或者其他辅助装备;
精度不高。
激光定位导航
激光定位导航的原理和超声、红外线的原理类似,主要是发射出一个激光信号,根据收到从物体反射回来的信号的时间差来计算这段距离,然后根据发射激光的角度来确定物体和发射器的角度,从而得出物体与发射器的相对位置。
优点:
是目前最稳定、最可靠、最高性能的定位导航方法;
连续使用寿命长,后期改造成本低。
缺点:
工业领域的激光雷达成本比较昂贵。
在激光测距中,激光雷达凭借良好的指向性和高度聚焦性,使得激光雷达+SLAM技术相结合的激光SLAM成为主流定位导航方式。SLAMTEC—思岚科技的自主定位导航技术采用的就是激光+SLAM技术。
RPLIDAR A2采用三角测距原理,配合自主研发的SLAMWARE核心算法,让机器人实现自主定位导航与路径规划。主要应用于服务机器人导航与定位、需要长时间连续工作的服务机器人、工业领域、环境扫描与3D重建等领域。
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%