您好,欢迎来电子发烧友网! 请登录,新用户?[免费注册]
推荐 + 挑错 + 收藏(0) + 用户评论(0)
分享到:
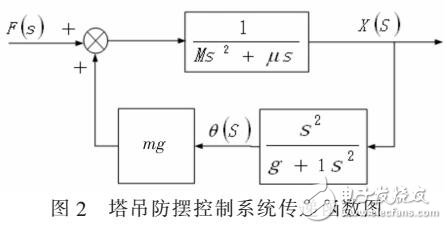
基于塔吊吊物的高效运行和安全性为目的,采用了一种基于模糊PID控制的算法来进行塔吊消摆。通过塔吊防摆控制系统的模糊PID控制器对小车移动的位移进行控制,同时用模糊控制算法对摆角进行控制,即控制塔吊变幅和起升电机的转速,从而得出小车的准确定位和吊物快速防摆。通过MATLAB仿真可以看出用此方法响应速度只用了14 s,系统具有较强的鲁棒性。
非常好我支持^.^
(0) 0%
不好我反对
发表评论,获取积分! 请遵守相关规定!提 交
or
注册会员
游客: