基于动态权重的实时地图匹配改进算法
大小:0.87 MB 人气: 2017-11-29 需要积分:1


标签:匹配算法(9353)
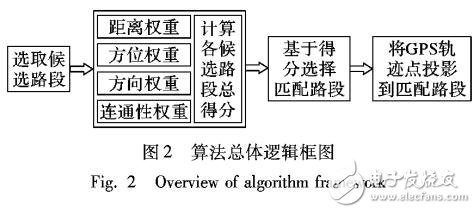
针对当前实时地图匹配算法难以同时保证匹配高准确性和高实时性的问题,提出一种基于动态权重的实时地图匹配改进算法。首先,算法考虑了相邻全球定位系统( GPS)轨迹点在时间、速度和方向上的约束关系,以及道路网拓扑结构,并基于时空特性分析,建立了距离权重、方位权重、方向权重和连通性权重组成的权重模型;然后,根据GPS轨迹点自身属性信息,建立了动态权重系数模型;最后,根据置信度水平选择最佳匹配路段。用三条总长36 km的重庆城市公交车行驶轨迹进行测试,结果显示:所提算法平均匹配正确率达到97. 3l%,单个轨迹点匹配平均延迟为17.9 ms。新算法匹配正确率和实时性较高,在Y形路口和平行路段的匹配效果上优于对比算法。
非常好我支持^.^
(0) 0%
不好我反对
(0) 0%
下载地址
基于动态权重的实时地图匹配改进算法下载
相关电子资料下载
- OpenCV边缘模板匹配算法原理详解 640
- 双目影像密集匹配算法的综合分析 1210
- 三种最常用的特征检测与匹配算法总结 4377
- 多传感器特征融合—匈牙利匹配算法原理 628
- CREStereo立体匹配算法总结 1771
- 图像匹配算法SIFT算法实现步骤简述 1455
- 一文读懂经典双目稠密匹配算法SGM 1078
- 3D模板匹配算法概述 1243
- 几个经典的立体匹配算法的评价指标和数据集 2193
- 什么是模板匹配?模板匹配的原理讲解 图像处理与模板匹配算法 32784