本文以FPGA作为核心处理器,提出了一种基于FPGA多路机载冗余图像处理系统的设计方案。##整个系统显示的分辨率为1600×1200@60 Hz,信号位为真彩色24b,则一帧图像所需需要存储的容量C≈47 Mb。##读写操作交替进行仿真图如图5所示。图5中包含了两个写入操作,一个读取操作。
2014-01-07 10:28:32 3905
3905 
根据线阵CCD图像检测和识别系统的要求,分析线阵CCD图像与子图像的位置关系,采用“图像转置缓冲区”和读写状态机的处理方式,设计基于FPGA 的线阵CCD 子图像提取模块,具有FPGA 资源占用少、逻辑清晰的特点。用MATLAB 和Modelsim 软件进行联合仿真,验证了设计的正确性。
2014-02-18 15:34:541778 
对于一副测试图像,提取得到的2000个proposal经过CNN特征提取后输入到SVM分类器预测模型中,可以给出特定类别评分结果。
2020-08-27 16:35:154317 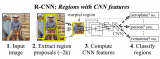
边缘和轮廓的提取是一个非常棘手的工作,细节也许就会被过强的图像线条掩盖,纹理(texture)本身就是一种很弱的边缘分布模式,分级(hierarchical)表示是常用的方法,俗称尺度空间
2020-10-07 15:23:002989 
有多种 3D 传感器方案来实现深度感知系统,包括立体视觉相机、激光雷达和TOF(飞行时间)相机。每个选择都有其优缺点,其中,嵌入式深度感知立体系统成本低,坚固耐用,适合户外使用,并且能够提供高分辨率的彩色点云。
2022-08-23 16:45:151873 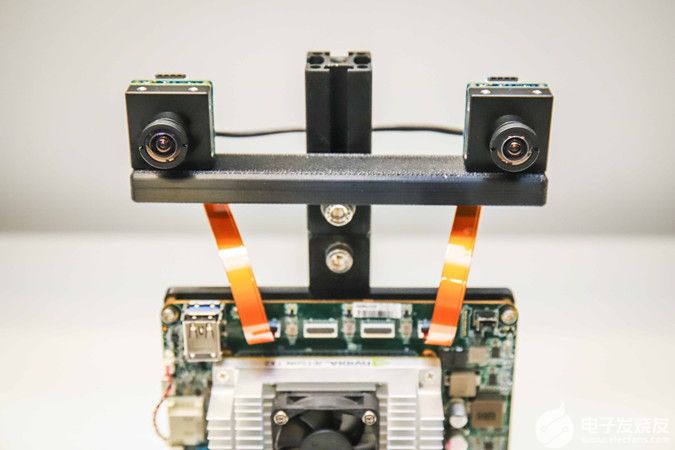
嗨,我们正在使用连接到一台电脑的多台D415相机,通常工作正常。最近我们发现几个传感器收集不正确的深度图不规则,在过去3个月大约10次。看到这个图像集。如您所见,彩色图像是正确的。但由于不明原因
2018-11-19 14:19:13
我从英特尔 - RealSense-D400系列 - 数据表.pdf第94页的图纸中推测,深度传感器的中心距摄像机右侧(USB侧)37.5毫米:根据经验,我推断深度图焦点X在相机的脸后面约32mm
2018-12-05 10:52:34
`一、labview直方图程序介绍1、前面板2、程序框图3、图片二、基本概念介绍边缘:图像的基本特征,具有灰度值不连续的性质,即不同灰度值的相邻区域之间。边缘点:对于于一阶微分幅度的最大值点以及二阶
2020-12-01 12:16:30
图像如:人,将人的边缘轮廓提取出来!急急急急。。。。有这方面材料的兄弟救救急啊啊啊啊啊啊
2013-03-04 12:53:04
要的不变性质:光线的变化显著地影响了一个区域的外观,但是不会改变它的边缘。最重要的是人的视觉系统也是对边缘最敏感的。边缘检测是图像处理中的重要内容。边缘是图像的最基本特征,是图像分割、特征提取和图像识别的前提
2015-07-07 19:39:57
部分,首先是最重要的部分,sobel边缘检测(硬件加速模块)Sobel算子主要用作边缘检测,在技术上,它是一离散性一阶差分算子,用来运算图像亮度函数的一阶梯度之近似值。在图像的任何一点使用此算子,将会
2015-07-07 20:41:34
本帖最后由 eehome 于 2013-1-5 09:51 编辑
入侵报警系统设计方案
2012-08-18 15:36:22
以下是基于 DSP5509 进行数字图像处理中 Sobel 算子边缘检测的硬件设计方案:
一、总体架构
图像采集:使用合适的图像传感器,如 CMOS 传感器,通过相应的接口(如 SPI、I2C 等
2024-09-25 15:25:29
”特征的算法,同时根据学习到的“经验数据”,从而能把图片中的猫都识别出来。基于“深度学习”的智能分类 智能机器人就是通过搭载“深度学习”系统,实现对环境参数的感知,从而智能判断自己应该执行什么程序,包括
2018-05-31 09:36:03
【摘要】:针对依赖传统Canny算子的基于边缘的图像检索系统所存在的不足,提出一种基于Canny边缘检测的图像检索算法。使用改进的Canny算子提取图像边缘特征,将该特征通过傅里叶描述子转化为向量
2010-04-24 10:03:36
`基于FPGA的图像拉普拉斯边缘提取 AT7_Xilinx开发板(USB3.0+LVDS)资料共享 腾讯链接:https://share.weiyun.com/5GQyKKc 百度网盘链接
2019-07-10 09:12:31
边缘检测技术的主要应用、FPGA技术在国内外的发展现状及应用、系统设计的主要内容及方案、系统的设计流程。
还会介绍基于FPGA实现图像的实时采集部分,包括图像信息的实时采集,摄像头型号及其参数,SCCB
2023-06-21 18:47:51
摘要 :本文设计了一种 基于 FPGA 的实时边缘检测系统 ,使用OV5640 摄像头模块获取实时的视频图像数据,提取图像边缘信息并通过 VGA显示。FPGA 内部使用流水线设计和 并行运算加速
2024-05-24 07:45:44
`基于FPGA的数字图像处理领域的边缘检测系统。该系统实现了从24位真彩色图片的存储到VGA显示边缘信息。`
2013-06-26 13:36:53
嗨,大家好,我试图从深度图像中找到几个中心像素。我正在尝试实现分割,我需要找到分割对象的距离。这就是我的想法,这将是有效的。当彩色图像用于分割时,全帧深度图像将用于找到距离。在我的下面的代码中。我
2018-11-19 14:19:48
我从realsense查看器中获取d435深度相机的数据,当我保存深度图像的快照时,我在规格中得到8位(1-256)灰度图像,据说相机给出了16位深度图片。你知道我怎么能得到16位图像?以上
2018-11-27 14:11:37
引言边缘可定义为图像中灰度发生急剧变化的区域边界,它是图像最基本的特征,是图像分析识别前必不可少的环节,是一种重要的图像预处理技术。边缘检测主要就是(图像的)灰度变化的度量、检测和定位,它是图像分析
2019-07-31 06:38:07
对于自主机器人导航和其它机器视觉应用来说,实时深度感知是很关键的。目前通过立体图像来计算深度的算法计算量很大,例如差异测绘,要占用CPU大量的时间,或者需要用昂贵的器件进行实时操作。
2019-10-17 08:28:30
例提供一个正方体的图片,通过边缘检测提取出它的棱上的一系列点,如何通过这些点还原成数个方程组
2015-05-13 18:24:44
图像传感器、深度感知、传感器融合,是感知未来发展的三个趋势,而汽车、机器视觉、边缘人工智能(Edge AI)是智能感知最聚焦的3大应用市场。安森美半导体是全球唯一一家提供完整感知模式及方案的公司
2019-07-30 07:16:18
FPGA是如何实现图像的边缘检测的?怎样去设计一种基于FPGA的实时图像边缘检测系统?
2021-10-19 10:10:23
我现在只是做到了一般的东西,但是在vision上找不到角点提取与边缘提取的函数不知道怎么弄,求大神指导
2013-04-26 17:48:56
求一款LDS6204防水汽电容触摸的设计方案
2021-06-01 06:19:54
本文给出了一种基于ADV202的JPEG2000图像压缩与解压缩系统的设计方案。
2021-04-20 06:36:31
求一种基于FPGA的锁相环位同步提取电路的设计方案。
2021-04-29 06:52:21
求大佬分享一种多光谱可见光遥感图像压缩系统的设计方案
2021-06-02 06:39:48
的请求,并驱动液晶显示器显示视频图像。本实例除了前面提到对原始图像做DDR3缓存和显示,还会在原始图像缓存到DDR3之前,另外做图像的多行缓存和拉普拉斯边缘提取处理,获得新的图像流,这个图像流通
2019-12-19 09:45:41
`原图像如下图1所示: 图1我用边缘检测后的图像如图2 所示图 2我想接着把人物的轮廓提取出来其他都不要应该怎么实现,希望高手能给予指点`
2012-10-08 12:35:33
为了保证图像采集的高速性和连续性,求一种适用嵌入式系统的数字图像采集模块设计方案?
2021-04-08 06:13:26
自动泊车辅助、自动紧急制动、车道保持辅助、驾驶员疲劳警报等。基于摄像头的感知功能在当今的车辆中至关重要。感知系统的功能与人体具有很强的相似性:摄像头或图像传感器充当车辆的“眼睛”,数据从图像传感器发送到
2022-11-10 08:09:48
研究了小波技术在图像边缘提取中的应用,解决了目前图象中存在的局部分割问题,提出了链的百分比概念;针对分割结果的不封闭性,采用边缘点生长的方法,有效地解决了区域
2009-06-06 16:09:15 12
12 本文提出了数学形态变换结合 Canny 边缘算子提取图像边缘的方法,通过研究骨骼CT 图像边缘提取,证明该方法几何意义明确,去噪效果明显,性能优越。关键词 数学形态变换
2009-06-11 09:51:0812 本文提出了一种基于自适应边缘提取的人眼定位算法。首先通过高斯平滑滤波对原始图像进行预处理,然后利用Robert 算子进行边缘提取,并且以边缘像素点的总数与图像像素点的
2009-07-16 09:21:3019 在医学图像中,在相对较小的区域内图像频率的陡峭变化反映了目标对象的边缘信息,基于Sobel 算子的梯度向量操作对低噪声的医学图像的边缘提取效果较好,采用Java技术
2009-07-30 09:23:1118 该文基于合成孔径雷达(SAR)图像低信噪比的特点,设计了一种基于融合边缘检测的线性特征提取算法。首先采用融合Canny算子及ROA算子得到边缘点,然后利用Radon变换得出线基元,最
2009-11-17 15:20:5419 针对依赖传统Canny算子的基于边缘的图像检索系统所存在的不足,提出一种基于Canny边缘检测的图像检索算法。使用改进的Canny算子提取图像边缘特征,将该特征通过傅里叶描述
2010-02-11 11:22:3428 提取随机排列胶囊图像中分离的、单个的边缘,是胶囊缺陷检测与计数的前提。随机排列的胶囊具有倾斜度不确定和多胶囊粘连的特点。由此,本文先提取胶囊的边缘,再将“点”连接
2010-02-21 11:00:3418 遥感图像为地理信息系统数据的更新和应用提供了有利条件,遥感图像的特征提取是其中的关键问题。针对灰色绝对关联度计算模型的特点,提出一种基于灰色绝对关联度和图像子块标
2010-03-01 14:15:327 后视镜、增强现实抬头显示、智能座椅、域控制器等部件,可深度融合 ADAS、TBOX、车身、高精地图等 信息,打造一体化智能座舱解决方案。智能座舱感知系统SCSS主要
2024-12-05 13:21:09
用户提供便捷高效的3D感知能力。该产品通过Type C接口供电并同时输出深度图像和2D彩色图像信息,支持3D点云与2D彩色图像融合。产品特性1、支持切换深度/彩色
2024-12-23 16:23:21
提出了一种基于人眼微动机理的边缘提取算法.通过模拟眼球的微动,提取图像的微动边缘,同时为了减少伪边缘的产生,对其微动边缘图像进行均值滤波处理,最后应用非极大值抑制和双阈值检测边缘连接提取图像的二值化边缘.实验结果显示,该算法边缘提取效果较好,达到
2011-02-14 15:35:2229 红外图像受噪声污染严重,边缘模糊,应用传统的边缘提取算法提取边缘较为困难。本文根据人眼微动视觉成像的基本原理,结合红外图像的特点进行了边缘提取的研究。
2011-07-09 17:15:161540 通过详细分析电容式触摸屏的结构以及电极设计,为电容式触摸屏提供了一种单层膜ITO实现多点触摸的设计方案。实际验证结果表明,在单手指触摸和两根手指触摸的情况下,所设计的
2011-08-20 16:33:266314 
提出了一种新的横向和纵向模板算法,通过仿真实验,获得了优于梯度算子提取图像边缘的结果。并对以上算法进行改进,在边缘图像信息衰减微小的情况下,有效地改善了图像边缘的提取时
2011-11-11 14:26:4919 提出基于Canny算子并结合图像增强和数学形态学的综合边缘提取算法。该算法首先对原始图像进行增强,以便于计算机的分析;然后利用Canny算子对CT图片进行边缘提取,该算子具有非极
2012-01-13 09:45:5222 提出一种基于 STM32F103 单片机的用于电动车电池能量管理系统(EMS)的液晶显示 触摸屏的设计方案,该方案以 STM32F103 作为核心控制器。
2015-11-09 16:29:384 本文档内容介绍了基于深度图像重建Matlab代码,供网友参考。
2017-09-15 10:03:3321 1 引言 随着航空航天技术的发展,图像无线传输技术日趋成熟。而嵌入式图像无线传输技术以其安装方便、灵活、适合广泛普及等优点在广大领域备受关注。本文介绍一种基于DSP的无线图像传输系统的设计方案与实现
2017-10-24 10:44:1911 图像边缘提取是图像处理及计算机视觉中的最基本问题,边缘检测的结果直接影响后续处理的精度与结果,其关键是在去除图像噪声和锐化图像边缘的同时,保持并增强图像的重要特征。传统图像边缘检测方法如微分算子法
2017-10-30 11:11:111 基于DSP的无线图像传输系统的设计方案与实现方法。 2 系统总体设计方案 图1为该系统设计框图。该系统分为图像采集、图像数据处理及无线通信3个模块。图像采集完成图像数据的采集;图像处理实现图像数据的压缩及相关处理:无线通信传输压缩
2017-11-01 10:12:3510 相机采集的。为了提高平面提取的速度,我们首先计算深度图像中点的法向量,通过法向量来判断这些点是否在一个平面上。运用求点的法向量可以同时检测多个复杂的平面,而且实验结果显示该方法比传统的3D Hough Transform以及RANSAC方法要快。此种方
2017-11-16 10:10:124 图像边缘是图像分析和识别的基础,图像边缘信息的准确性和完整性对后续图像分析和识别有重要影响。为实现图像边缘有效提取,提出一种利用数据场和图像欧氏距离的图像边缘提取方法。首先,该方法利用数据场理论构建
2017-11-24 15:03:051 深度图像受其测距原理所限,存在边缘不匹配、无效像素、噪声等问题,提出一种基于改进的各向异性扩散算法的深度图像增强方法。首先,校正深度图像和彩色图像的位置关系,并根据时间连续性选择多帧图像,进行多帧
2017-11-25 11:08:469 处理。随着图像技术与硬件的发展,利用微软Kinect或华硕Xtion等设备,学者可以实时获取人体的深度图像信息。与传统的图像相比,深度图像不受光照影响,能够提供三维空间信息。利用深度图像,学者们对行为识别做了许多研究,本文
2017-12-09 11:47:510 针对复杂环境下的深度图像手势特征提取信息冗余量大、编码不稳定等问题,提出了一种改进的基于曲率局部二值模式( LBP)的深度图像手势特征提取算法。该算法首先通过坐标转换将分割出的手势深度数据转换为点云
2017-12-11 16:21:064 图像分割的研究多年来一直受到人们的高度重视,至今提出了各种类型的分割算法。Pal把图像分割算法分成了6类:阈值分割,像素分割、深度图像分割、彩色图像分割,边缘检测和基于模糊集的方法。但是,该方法中
2017-12-19 09:29:3811736 
针对分布式多视点加深度格式( DMVD)的视频编码中深度图视频解码质量问题,提出一种结合予带层及子带系数的小波域分布式深度视频非均匀量化方案,通过给边缘分配更多比特来提升深度图的边缘质量。结合深度图
2017-12-20 16:34:001 针对传统的彩色视频中动作识别算法成本高,且二维信息不足导致动作识别效果不佳的问题,提出一种新的基于三维深度图像序列的动作识别方法。该算法在时间维度上提出了时间深度模型(TDM)来描述动作。在三个正交
2017-12-25 14:34:521 针对应用在机器人三维(3D)场景感知测量中,Kinect深度图的联合双边滤波(JBF)存在降低原始场景深度信息精确度的制约性问题,提出一种新的预处理算法。首先,通过构建深度图的测量和采样模型,得到
2017-12-25 16:58:020 针对立体视觉深度图特征提取精确度低、复杂度高的问题,提出了一种基于主成分分析方向深度梯度直方图( PCA-HODG)的特征提取算法。首先,对双目立体视觉图像进行视差计算和深度图提取,获取高质量深度图
2017-12-26 14:32:070 提出一种基于局部姿态先验的从深度图像中实时在线捕获3D人体运动的方法,关键思路是根据从捕获的深度图像中自动提取具有语义信息的虚拟稀疏3D标记点,从事先建立的异构3D人体姿态数据库中快速检索K个姿态
2018-01-03 14:33:440 针对边缘检测中存在的噪声敏感性问题。本文根据Mallat快速小波变换算法的思想,提出用高斯函数和其一阶导数分别作为低通和高通滤波器对图像进行多尺度分析,通过非下采样提取不同尺度上的系数,然后利用尺度
2018-02-28 15:46:471 超市储物柜电子系统的设计方案
2018-05-09 10:40:135 NU3000是一种多核处理器,它能够从立体图像中提取实时深度,以及处理深度图像(连同其他传感器)来融合出实时定位和地图创建解决方案。
2018-07-02 11:50:001807 该深度图像传感器可在黑暗中拍摄250米远,10厘米物体的图像。为了测距,该传感器采用了ToF(飞行时间)法,可发射红外光并基于反射光返回时间计算物体距离。
2018-08-20 10:45:045542 本文档的主要内容详细介绍的是图像边缘检测和特征提取实验报告的详细资料说明目的包括了:1.了解图像边缘检测的原理。自己实现边缘检测算法,对特定的几幅图像进行边缘检测,并达到较好的效果。2.了解特征提取的原理,并对图像中存在的一些特征进行特征提取。
2019-04-19 08:00:002 多孔卷积结构,将原始图像中的空间信息与提取到的底层图像特征相互融合,得到初始深度图;最后,将初始深度图送入条件随机场(CRF),联合图像的像素空间位置、灰度及其梯度信息对所得深度图进行优化处理,得到最终深度图。在客观数
2019-10-30 14:58:3610 (2)亚像素细分算法定位 经过扩展方向模板的Sobel细化算子后,提取接近单像素的边缘,在其梯度方向上用亚像素细分算法对图像边缘进一步定位。
2020-08-13 16:04:351439 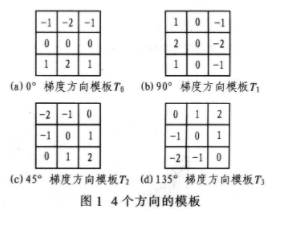
多孔卷积结构,将原始图像中的空间信息与提取到的底层图像特征相互融合,得到初始深度图;最后,将初始深度图送入条件随机场(CRF),联合图像的像素空间位置、灰度及其梯度信息对所得深度图进行优化处理,得到最终深度图。在客观数
2020-09-29 16:20:005 今天,我们将深入探讨深度图像修复的一个突破,上下文注意力。通过使用上下文注意力,我们可以有效地从遥远的空间位置借用信息来重建局部缺失的像素。这个想法实际上或多或少和上一篇的复制-粘贴是一样的。
2021-04-07 19:01:043547 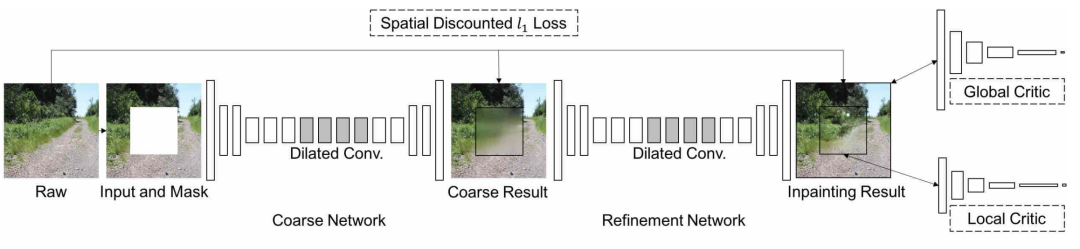
为实现复杂背景图像中髙精度边缘的准确提取,提出一种改进的单像素边缘提取算法。在改进的全卷积神经网络中,通过添加辅助输出层与采取多尺度输入的方式初步提取图像多像素边缘,并利用分水岭算法对多像素边缘进行
2021-05-27 14:30:005 广角相机以小、轻、经济高效的外形提供丰富的信息,是移动机器人的独选。内部和外部的精确标定是使用广角镜头边缘进行深度感知和里程测量的关键先决条件。
2022-11-14 16:11:202188 TYPE-C 转 LVDS 芯片及设计方案
2022-11-29 11:07:272055 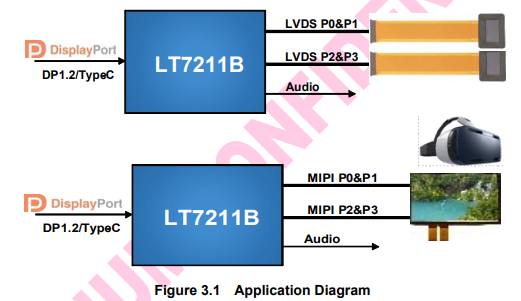
今天我们将一起探究如何使用OpenCV和Python从图像中提取感兴趣区域(ROI)。
在之间的文章中,我们完成了图像边缘提取,例如从台球桌中提取桌边。使用了简单的OpenCV函数即可完成
2023-02-07 14:42:002556 Sobel算子是一种基于图像梯度的边缘检测算法,可以在x方向和y方向上计算图像的梯度,然后将两个梯度值合并成一个边缘强度值。
2023-02-24 17:56:492826 现在 CNN 模型这种天然的特征描述机制,给图像预处理提供了不错的工具,它能将图像处理和视觉预处理合二为一。
2023-04-14 10:30:201991 本文提出了一种生产化的端到端立体深度感知系统设计,可以完成预处理、在线立体校正和立体深度估计,并支持纠偏失败后的单目深度估计备选方案。同时,该深度感知系统的输出应用于一种基于智能眼镜拍摄
2023-05-26 16:12:001354 
电子发烧友网站提供《边缘AI套件上的立体视觉深度感知.zip》资料免费下载
2023-06-12 14:36:400 今天介绍一下深度图像的获取方法主要有哪些,以及这些方法会导致深度图像中存在什么样的问题。 在计算机视觉系统中,三维场景信息为图像分割、目标检测、物体跟踪等各类计算机视觉应用提供了更多的可能性,而
2023-06-25 16:26:362062 
1500V储能系统设计方案,储能系统划分为10个2.5MW/5MWh储能单元。采用了天合储能的非步入式电池舱设计方案,安装维护边界,配上“一簇一散热”的精细化热管理,可将簇内温差控制在8℃以内,天合储能致力于用高可靠、低成本、高安全的产品标签赢得
2023-10-17 09:58:561823 针对储能系统安全监测管理,可以采用佰马边缘智能网关方案,依托强大的数据采集能力、边缘计算能力、设备控制能力、联动响应能力,实现对储能系统的精细化、智能化安全管控,保障系统整体安全稳定。
2023-10-25 18:00:141106 
使用。本文旨在详细阐述一个光伏储能系统的设计方案,包括系统概述、系统组成、设计原则、关键技术、设计步骤和预期效果等方面。
2024-05-17 16:36:183843 图像边缘检测系统的设计流程是一个涉及多个步骤的复杂过程,它旨在从图像中提取出重要的结构信息,如边界、轮廓等。这些边缘信息对于图像分析、机器视觉、图像压缩等领域至关重要。以下是一个详细的图像边缘检测系统设计流程,包括关键步骤、技术细节和可能的挑战。
2024-07-17 16:39:361070
 电子发烧友App
电子发烧友App








 工商网监
工商网监
评论