 waymo 无人车的颜值视野操控性能适应性是不是拥有了完美的硬件呢?
waymo 无人车的颜值视野操控性能适应性是不是拥有了完美的硬件呢?
▌什么是硬件?
请允许我拿西部世界[1]的片头来举例,我们造好人的骨骼,肌肉以及神经,最后再给他注入思想,他就变成了一个完整的人。
硬件可以理解为人的骨骼,肌肉以及更复杂的器官。我们需要赋予硬件复杂多样的功能以及无与伦比的适应性。
那么我们需要无人车具备哪些功能并且适应复杂多变的环境呢?
▌颜值
分享老师首先强调的第一点就是颜值,颜值即正义。曾经有段时间我的 ID 就是颜值即正义,特别是前2年韩剧流行时这句话特别火,直白点说就是长得好看的做啥都对,即使做错了,那也是你的错。我们先看下 waymo 的无人车。
一开始我也很排斥无人车上面加装的钢骨架和传感器,也许是接触无人车久了,现在回过头来再看 waymo 无人车的颜值一点也不低,我甚至觉得非常酷。也许还有漫长的路要走,使人们能接受这种审美。同时我们也需要不断改善无人车的外观,人们不会为丑的东西买单,可以看到 waymo 无人车的外观也在不断改善。
我们再回过头去看下初代的无人车,下图是DARPA 挑战赛上夺冠的无人车 "Stanley",真是充满了前苏联式的暴力美学,酷似高达。
但是有什么车不那么在乎颜值呢?就是卡车,因为不是自己所有,主要是考虑功能,谁也不会在乎厨师的颜值高低,只是在乎菜做的好不好吃。所以卡车可以相对任意的架设设备,而可以较少的考虑颜值。
我们再看下应该如何设计无人车顶的外壳,之前我一直以为车上的壳子和传感器是一个整体,只需要买一个壳子,之后就可以直接安装到车上了。没想到实际上是把原来的架子用壳子遮挡起来了。为什么我希望能够模块化传感器模组呢,很显而易见的场景就是采集地图,如果是在车上安装架子,那么需要先改装车,安装传感器,最后再把车开过去,假如你在深圳,客户在北京,车开过去的成本太大了,但是如果是一个模组,可以把模块快递过去,安装到车上,对面接一个电脑,通过简单的校正就可以工作了,相对成本低很多。
▌视野
另一个很重要的方面是视野范围,这也是一直强调的。看的更广和看的更远。
1. 如何做到全视野
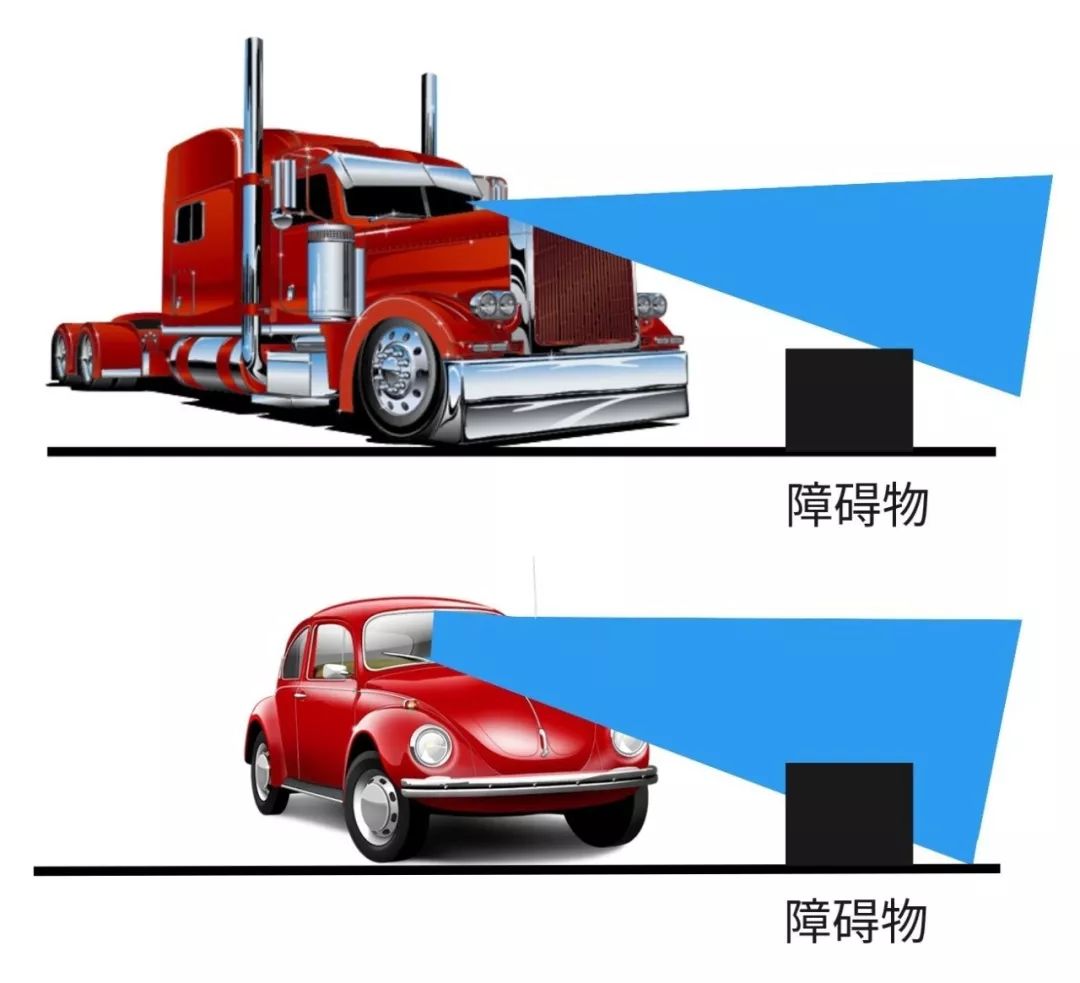
如果可以,我们需要 360° 的视野范围,拿卡车和小汽车举例子,可以看到卡车视角的盲区是很大的,给我映像很深的是看一个视频中的交通事故展示,卡车司机停车后,贴近车头有人通过,而司机在视野盲区看不到行人导致车祸。小汽车和卡车的视野比较:
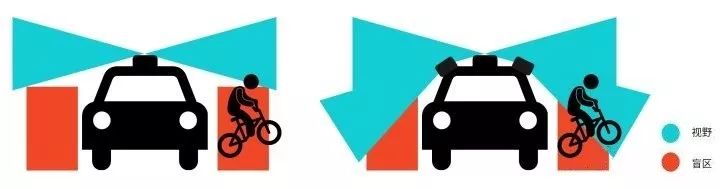
除了汽车带来的差异以外,不同的场景下也会导致视野的盲区,增加多个传感器可以解决视野盲区问题,下图中针对视野的盲区,在左右分别增加了2个激光雷达,扩大视野范围。
另外调整传感器的位置也影响到视野的范围,下图中在拐角处,特别是一些盘山公路,传感器的位置在车的中部和前部展现的视野范围也不一样。

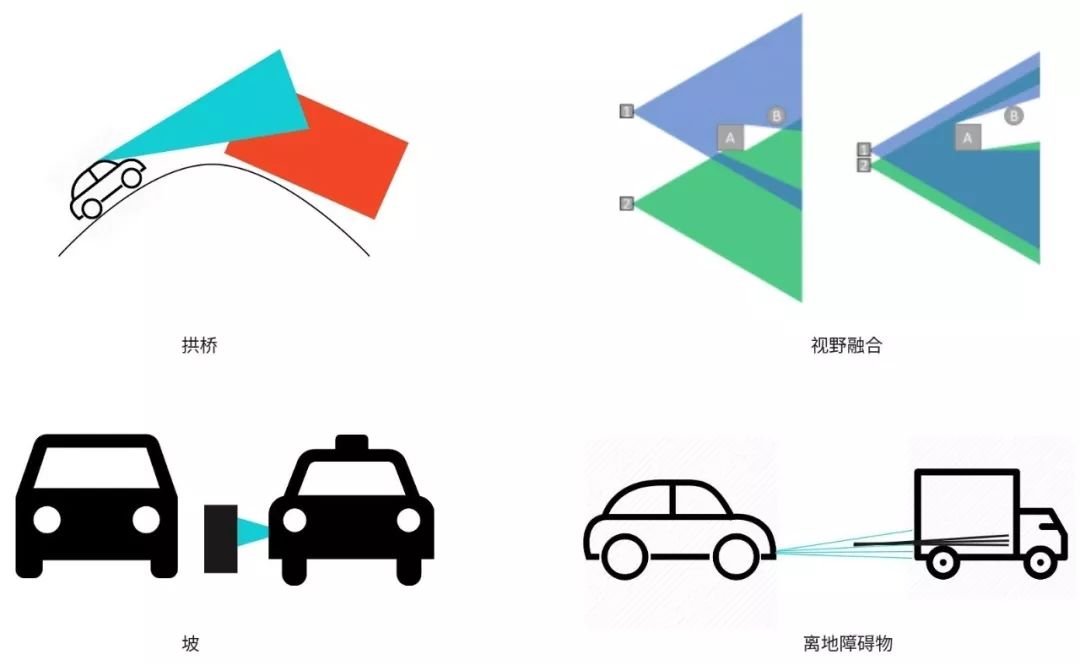
除了这些考验以外,还有其他难以解决的问题,遇到拱桥的时候即使在车前面有传感器,由于车的俯仰角度,也很难发现障碍物;传感器的位置同时也可能带来视野融合的问题,比如激光雷达看到了障碍物B而摄像头没有看到,融合的时候以哪个为准;由于毫米波雷达的垂直视野很窄,由坡导致的遮挡问题;另外的情况是卡车拖着钢筋,或者树木,由于很稀疏,靠雷达很难确认这类障碍物。详细的可以参考[2]:
我原本的一个想法是开发一款工具来识别汽车周围的盲区,在软件中设置好传感器的位置之后,可以查看盲区是多大,从而帮助硬件工程师选择传感器和确定传感器的位置。
2. 如何做到远距离视野
看的远的好处是当车在高速行驶的时候,可以更快的发现潜在的危险。激光雷达远距离的点很稀疏,目前最远的范围也就是100-150米左右,摄像头和毫米波雷达的范围更远,能检测到物体的速度也更高。我们通过下面这张图来说明视野范围:
3. 天气对视野的影响
天气对视野的影响是双方面的,一是会影响视野可见,二是影响看到的视野远近,下面我们来看下天气对不同的传感器有哪些影响:
雾霾- 雾霾对激光雷达的影响最大,因为激光的波长和雾霾的颗粒大小差不多,穿透不了雾霾,同时摄像头在雾霾的时候也会影响视野范围,而毫米波的波长较长,可以绕过雾霾颗粒,受到的影响较小。
下雨- 下雨对摄像头的影响比较大,一个可见的原因就是镜头会模糊,如果雨很大,只能依赖车内的摄像头。
光照- 光照对摄像头的影响也很大,当强光照射(对面远光灯直射),光线很暗(夜晚)或者光照突然变化(隧道出口)的时候,会导致摄像头失灵,一个好的办法是可以对摄像头做处理,来适应不同的曝光率。由于激光雷达是主动发射光的设备,所以光照的变化对激光雷达影响不大。
下雪- 下雪对摄像头,激光雷达,毫米波雷达都有影响。
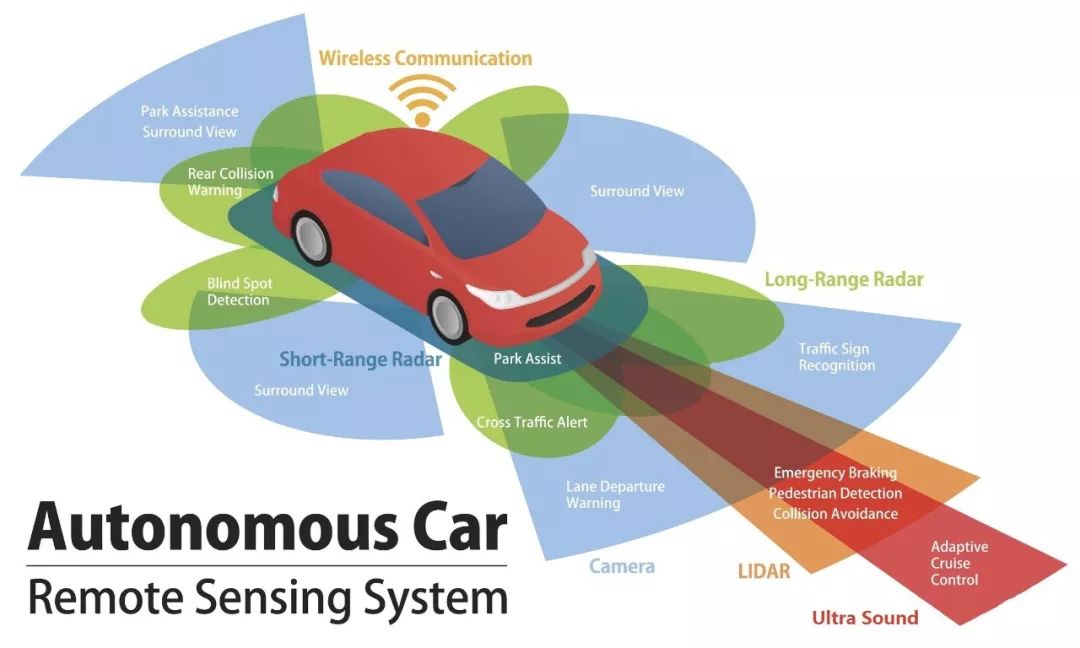
我们从功能上和适应性上把各个传感器的雷达图画出来,可以看到每个传感器都有它的优点和缺点,没有完美的传感器,我们只能通过传感器融合来实现近似完美,参考[3]。

▌操控
我们到底需要什么样的汽车底盘,还是直接跳过去生产下一代?
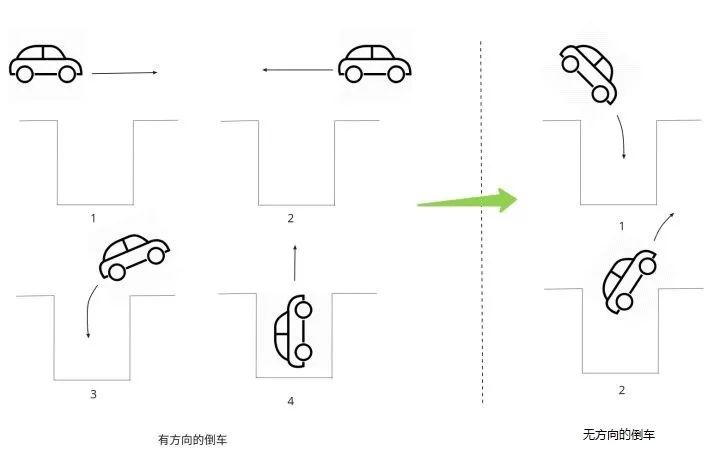
当初我是被 Zoox 的设计惊艳到了,平时我也有这种想法,为什么每次停车的时候都需要倒车进去,而不是直接开进去呢,Zoox 就是为了解决这个问题而生的,因为 Zoox 认为车有方向是人类的操控习惯,机器不存在这个问题,机器可以控制前轮,甚至后轮的方向,机器也不需要区别前进和后退。因此 Zoox 生产的车是没有方向的,甚至车里的座位也区分不出前后,当然为了安慰我作为人类脆弱的心灵,他们从道义上应该提供一个标志,来告诉我哪里是前,哪里是后。
从人类的角度我确实难以接受没有方向的车,但是可以同时控制前轮和后轮的操控真是简单了很多。
1. 倒车的时候方便了很多
如果是传统的有方向的车,我们先要开过去,之后再倒车分为4步。而无方向的车就简单了,直接开进去,然后就直接开出来了,因为没有方向,向前和向后对机器来说没有任何区别。
2. 可以原地转弯
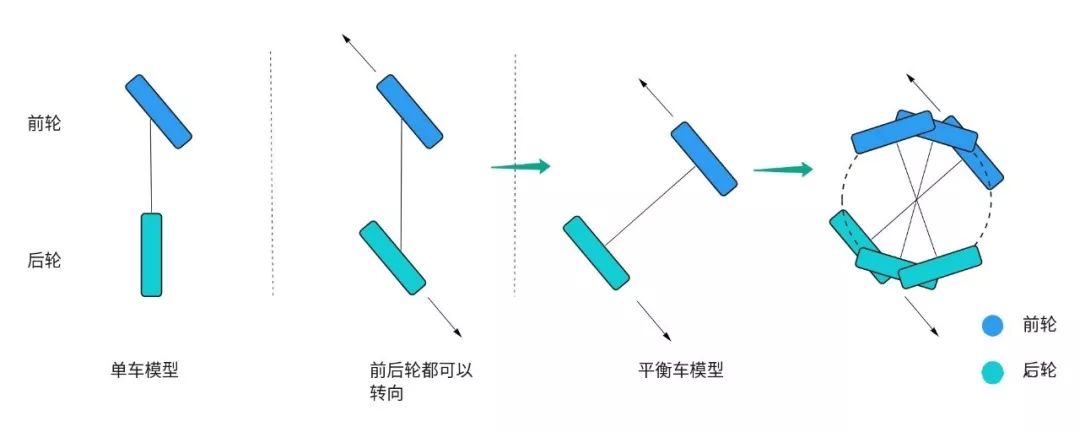
我们知道目前的汽车都是单车模型,也就是前轮转向。而假设车的后轮也可以转向,我们可以把模型抽象成2轮自平衡小车,这样就可以在原地360°转向。学车的时候最怕一会前进档,一会倒挡,很容易搞混往哪个方向打方向盘,而机器就不存在这样的问题。这样操控的好处是可以原地实现转弯,以后再也不用担心掉不过头来的情况。
是不是感觉 Zoox 专门为机器而设计的下一代操控很酷炫,等到那一天来临时,恐怕我已经学不会开车了。
TODO:动态演示。本来想做个动态展示的,实在是没时间了。
▌性能
1. 提升性能
我们一直希望车能够性能强劲而功耗很低。半导体行业一直遵循着摩尔定律,即2年的性能翻一番。摩尔定律促进了整个 PC 时代的发展,但是现在摩尔定律失效了,目前硅基的制程最多到 7nm,再往前进一步已经相当困难了,因为距离近了会漏电,击穿硅晶体,导致良品率太低。制程的降低首先是可以减少功耗,其次是提升性能,目前来看很长一段时间通用 CPU 会陷入停滞。
要提升性能,神经网络的芯片还有很大的进步空间,比如 TPU,会大大降低深度学习的功耗,并且提升性能,这块可能是未来的主战场。另外一个比较好的方向是 FPGA 或者一些专用的芯片,把传感器融合算法和一些底层算法融入硬件,一是可以提高性能,二是分工明确,促进无人车系统的模块化发展。
2. 功耗的影响
我们再看下功耗对无人车的影响,首先第一点是供电,影响车辆的续航。假设按照 2KW 估算,特斯拉的电池容量是 75kWh (千瓦时)那么使用的时长是37.5小时。这还仅仅是运算的开销,还没有算车本身的开销,我想到了科幻电影里,由于能源紧张,智能操控体为了节省能源,而不得不进入休眠模式。
功耗太强带来的另外一个问题是散热。目前有用到水冷散热的,风扇可能满足不了太强的散热需求。我记得很早以前水冷都是拿自来水冷却的,过一段时间还需要加水,现在有水冷散热片就不用了,原理就是把水放在铜管里,循环流动散热,也不用加水了。加水有2个坏处,一是北方的冬天零下的时候如果是自来水会冻住,我们知道冻住之后水的体积会变大,会把发动机撑坏。二是我们知道水是会沸腾的,如果变为水蒸气,铜管会爆炸。所以目前的水冷都是水中加入了防冻液和各种专门用途的防腐剂组成的混合物,防冻,沸点也会到达120度左右,也就很好的解决了上面的问题。
最后的问题是出风口,和进风口,如果在后备箱,没有出风口和进风口,热量也很难散发出去。
▌适应性
良好的适应性代表着我们能够战胜复杂多变的环境。我们先看下我们处在什么样的环境下,然后再看我们面临着哪些挑战。如果有一天人类殖民火星了,我敢说,一定有人会把通用告上法庭,因为他们没有备注这点:地球生产的车不适用于火星。先看下无人车后备箱的整个结构:
无人车的后备箱放着电源,网络设备,运算单元以及各种数据线等,它们会面临着这些挑战:
振动- 因为长期和电子设备接触,这点我深有体会。比如机械硬盘最怕震动了,汽车经常处于颠簸状态,当初我们快递的4块硬盘都因为震动坏了;另外电路板也很怕震动,我们知道电路板的表面刷了一层绝缘胶,如果设计的不好,结构件经常摩擦电路板,会把绝缘层磨掉,电路会直接烧毁,这也是灾难性的。
温度- 汽车在夏天的时候在室外暴晒温度非常高,环境温度可能就是40-50度,而这时候如果机箱还在产热,那么温度会更高。汽车要求的温度范围非常高,仅次于航天,要求是 -40°~120° 的温度能够工作,可以说目前无人车大部分的元器件还达不到要求。
湿度- 湿度太高会导致电源短路或者进水。
盐- 在海边的城市,空气中还有盐,导致对汽车元器件的腐蚀性。
电磁- 大功率的计算单元会导致电磁辐射,而高速的总线也很怕电磁辐射。
这一块才是无人车工业化必须克服的挑战,是无人车得以大量生产的保障,想要无人车的普及,必须要解决上面的问题。
▌总结
假如我们现在拥有了酷炫的外观;广阔的视野;完美的操控;强劲的性能和极低的功耗;还能够适应各种复杂多变的环境。那么造物主们,我们是不是拥有了完美的硬件呢?
-
电路板
+关注
关注
140文章
4951浏览量
97685 -
无人车
+关注
关注
1文章
301浏览量
36469
原文标题:自动驾驶思考:硬件篇
文章出处:【微信号:IV_Technology,微信公众号:智车科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
BNC插座弯式适应性怎样

小米汽车发布智能底盘预研技术,展现极致操控性能
Waymo在洛杉矶全面开放无人驾驶出租车服务
请问TPA3112的输出波形在无滤波状态下是PWM波形式,怎样才能出来完美的正弦波呢?
如何在自己的固件中增加wifi自适应性相关功能,以通过wifi自适应认证测试?
7芯M16插头环境适应性测试

谷景告诉你屏蔽绕线功率电感是不是感量越大性能越好
一文看懂插件环形电感线圈究竟是不是随便绕的





 工商网监
工商网监
评论