无论是德国提出的工业 4.0参考架构(RAMI 4.0),还是美国提出的工业互联网参考架构(IIRA),均强化了机器/设备与控制/信息系统之间的网络连接的互操作性、高级数据分析与信息安全方面的功能,从而为智能制造提供信息感知、传输、分析、反馈、控制支撑。
从数据/信息/知识/智慧的DIKW金字塔模型而言,因为数据都来自于机器/设备层,没有数据,则任何工业互联网平台或者人工智能算法都会成为无源之水。因此,对于机器人行业来说,技术趋势之一是通过采用最新的ICT技术,强化机器人(OT)和信息系统(IT)之间的融合。
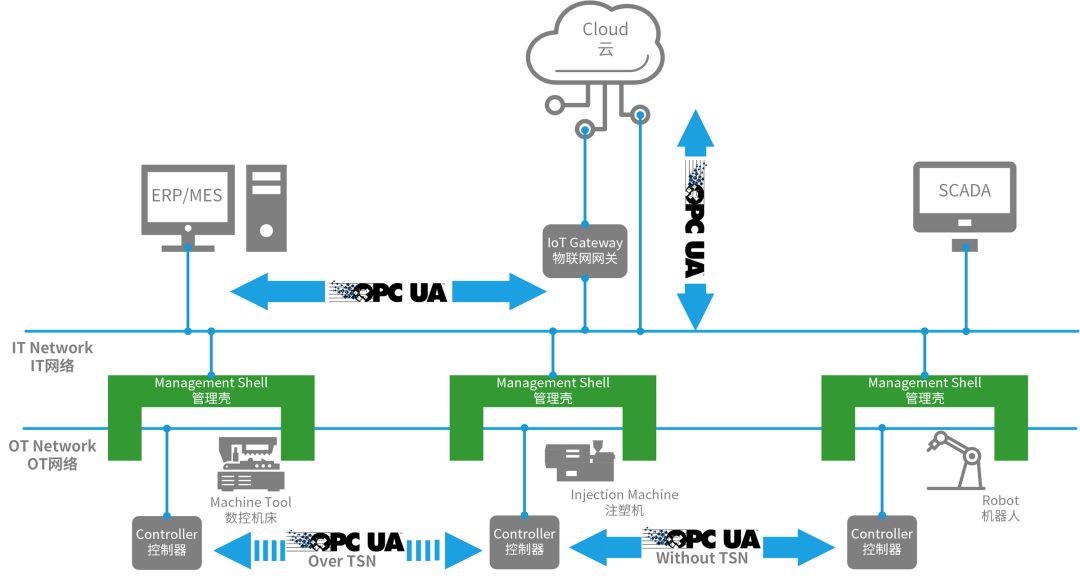
图1 :机器人+信息系统
目前,M2M通信一般采用IEC 61158标准的各种现场总线,但因为历史以及商业方面的原因,IEC 61158标准化了19种现场总线,而这些现场总线的硬件接口以及物理层/应用层均不完全相同,除非采用同一厂家(协议标准)的产品,否则在现场无法做到互联互通。
从这种现实困境来说,过多的标准等同于没有标准。时间敏感网络(TSN)是IEEE 802.1下面的一个工作组,通过在数据链路层引入新的时间同步方面的协议,解决标准的以太网因为非确定实时传输导致无法在工业现场使用的问题。
从另一个层面而言,为应对设备层之间(水平集成)和设备-云端之间(垂直集成)即插即用的挑战,在通信层/信息层会使用独立于平台和供应商、集成式地址空间和信息模型、面向服务架构(SOA)的OPC UA规范。
机器人和信息系统的融合会给一些新商业模式提供条件,比如目前主流的机器人维护模式还是定期巡检的方式,通过对机器人上传到云端的数据进行存储和分析,可以从网关供应商转向预测性维护服务提供商;又比如通过对物流机器人运行数据的存储和分析,可以从物流行业机器人供应商(提供机器人集成解决方案)转向物流服务(按照搬运包裹的使用量计费)提供商。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
相关推荐
如何使用PyTorch进行数字图像处理,它借助摄像头来获取视频的图像信息,然后通过已有的图像识别框架模型经深度学习和优化以达到更精准的识别结果,从而为进一步的执行处理提供数据支持和依据。而《具身智能机器人系统
发表于 01-01 15:50
。
多模态融合的创新与突破
机器人控制技术的另一个重要突破在于多模态大模型的应用。相比于仅通过文字进行人机交互的传统方法,现代机器人能够融合视觉、声音、定位等多模态输入
发表于 12-29 23:04
对人工智能、机器人技术和计算系统交叉领域感兴趣的读者来说不可或缺的书。这本书深入探讨了具身智能这一结合物理机器人和智能算法的领域,该领域正在塑造自主系统及其应用的未来。
开篇部分探讨了
发表于 12-28 21:12
研读《具身智能机器人系统》第7-9章,我被书中对大模型与机器人技术融合的深入分析所吸引。第7章详细阐述了ChatGPT for Robotics的核心技术创新:它摒弃了传统的分层控制架
发表于 12-24 15:03
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
物理交互纳入智能系统的核心要素。
第3章是探讨机器人计算系统。这一章节详细阐述了自主机器人的软硬件架构。计算系统需要满足
发表于 12-19 22:26
情况为例,具身智能机器人的核心元器件(包括 3D 视觉传感器、六维力传感器、微型传动系统、灵巧手与精密力控系统、高性能 驱控关节模组、融合通用大模型、
发表于 11-11 10:20
近日,IDC发布《中国医保信息系统市场份额,2023:深化应用》。东软在中国医保信息系统市场份额蝉联第一,持续保持行业领先优势。
![的头像]() 发表于
发表于 08-20 10:22
•639次阅读
柔性机器人和刚性机器人都是工业机器人的一种,柔性机器人和刚性机器人的主要区别在于它们的结构和使用方式:结构:柔性
![的头像]() 发表于
发表于 08-16 10:17
•564次阅读

本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
机器人控制系统是机器人技术的核心,它负责接收输入信号,处理信息,控制机器人的运动和执行任务。一个完整的机
![的头像]() 发表于
发表于 06-16 15:14
•1461次阅读
并联机器人和串联机器人的区别是什么? 并联机器人和串联机器人是两种常见的机器人系统结构,它们在设
![的头像]() 发表于
发表于 01-26 15:17
•3559次阅读
协作机器人和工业机器人区别在哪? 协作机器人和工业机器人是现代工业自动化发展中两个重要的概念。虽然这两种机器人都是用来提高生产效率和减少劳动
![的头像]() 发表于
发表于 01-26 14:56
•1998次阅读
智能机器人还集成了协作机器人、移动机器人和视觉引导技术,具有物料高精度抓取或放置功能,可满足各种复杂场景的协作搬运需求。
![的头像]() 发表于
发表于 01-17 11:58
•439次阅读
 机器人和信息系统的融合
机器人和信息系统的融合





 工商网监
工商网监
评论