 怎样用openFrameworks人脸跟踪器模式控制电机
怎样用openFrameworks人脸跟踪器模式控制电机
在本指南中,我们将记录四个输出的样本:
对于出现在相机前面的面部。
对于出现在相机右侧的脸部。
对于距相机一定距离的脸部。
对于出现在相机前面的物体。
安装openFrameworks人脸跟踪器模式
openFrameworks的安装文件,以及面部追踪功能,可在Wekinator网站上找到。

图像显示Wekinator网站上面部跟踪下载文件的位置ite。
下载面部跟踪文件后,解压缩并运行程序。它应激活计算机网络摄像头以跟踪用户的面部。
使用计算机网络摄像头识别面部的面部跟踪器程序的示例图像。
处理指令
在处理方面,本指南将要求使用草图,该草图将从Wekinator软件接收输出数据并将其转发给Arduino。
import vsync.*; // Importing the library that will help us in sending and receiving the values from the Arduino
import processing.serial.*; // Importing the serial library
// Below libraries will connect and send, receive the values from wekinator
import oscP5.*;
import netP5.*;
// Creating the instances
OscP5 oscP5;
NetAddress dest;
ValueSender sender;
// These variables will be syncronized with the Arduino and they should be same on the Arduino side.
public int output;
void setup()
{
// Starting the serial communication, the baudrate and the com port should be same as on the Arduino side.
Serial serial = new Serial(this, “COM10”, 115200);
sender = new ValueSender(this, serial);
// Synchronizing the variables as on the Arduino side. The order should be same.
sender.observe(“output”);
// Starting the communication with wekinator. listen on port 12000, return messages on port 6448
oscP5 = new OscP5(this, 12000);
dest = new NetAddress(“127.0.0.1”, 6448);
}
// Recieve OSC messages from Wekinator
void oscEvent(OscMessage theOscMessage) {
if (theOscMessage.checkAddrPattern(“/wek/outputs”) == true) {
// Receiving the output from wekinator
float value = theOscMessage.get(0).floatValue();
// Converting the output to int type
output = int(value);
}
}
void draw()
{
// Nothing to be drawn for this example
}
连接直流电机到Arduino
处理草图将从Wekinator发送输出数据到Arduino,它将相应地控制电机。
为了将电机连接到Arduino,请按照下图中的位置。
查看我们的文章详细说明如何通过openFramework发送和接收数据平台使用Arduinoto更好地了解openFrameworks如何与Arduino通信。
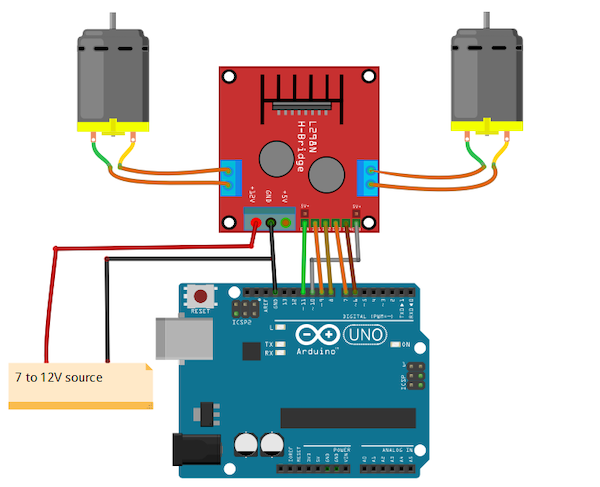
连接到Arduino UNO的电机示意图。
Arduino代码
#include //Including the library that will help us in receiving and sending the values from processing
ValueReceiver《1》 receiver; /*Creating the receiver that will receive only one value.
Put the number of values to synchronize in the brackets */
/* The below variable will be synchronized in the processing
and it should be same on both sides. */
int output;
//Motor Pins
int EN_A = 11;
int IN1 = 9;
int IN2 = 8;
int IN3 = 7;
int IN4 = 6;
int EN_B = 10;
void setup()
{
/* Starting the serial communication because we are communicating with the
Processing through serial. The baudrate should be same as on the processing side. */
Serial.begin(115200);
//Initializing the motor pins as output
pinMode(EN_A, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
pinMode(EN_B, OUTPUT);
digitalWrite(EN_A, HIGH);
digitalWrite(EN_B, HIGH);
// Synchronizing the variable with the processing. The variable must be int type.
receiver.observe(output);
}
void loop()
{
// Receiving the output from the processing.
receiver.sync();
// Matching the received output to light up led‘s
if (output == 1)
{
//Forward
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
}
else if (output == 2)
{
//Right
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
else if (output == 3)
{
//Left
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
}
else if (output == 4)
{
//Stop
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
}
在Wekinator中使用人脸检测
第一步是启动Wekinator平台并更改设置以反映下图中的设置。
将输入值设置为3.
将输出值设置为1.
将输出类型指定为“all continuous”
将所有其他设置保留为默认格式。
为了启用Wekinator和openFrameworks平台之间的通信,您需要下载ChucK编程语言,你可以在查克官方网站上这样做。
了解更多信息在安装和使用Wekinator程序时,请查看我们的如何开始使用Wekinator的指南。
Wekinator将从openFrameworks应用程序接收3个输入,然后向ChucK程序发送5个不同的输出,这会提示它产生不同的声音。
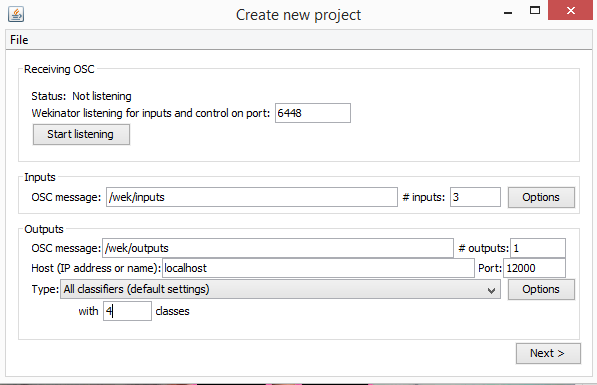
Wekinator软件程序中的“创建新项目”窗口。
单击“下一步”,将显示“新建项目”窗口,如下所示。
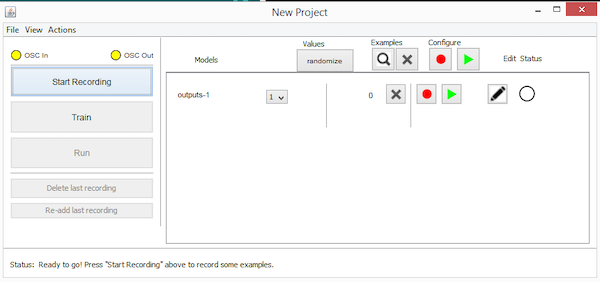
Wekinator软件程序中的“New Project”窗口。
将脸靠近相机记录一些测试。将分类器输出值指定为“1”。您还需要记录此移动的简短示例。
显示面部追踪器功能如何识别靠近相机的面部的示例图像。
接下来,将您的脸移到屏幕右侧,将分类输出值更改为“2”。再一次,记录运动。
显示脸部追踪器功能如何识别相机右侧脸部的示例图像。
然后将您的脸部从相机中进一步向后移动并将分类器输出更改为“3”。
人脸跟踪器功能如何识别远离相机的脸部的示例图像。
最后一步是完全退出相机视图。将分类器输出分配给’4。‘
脸部追踪器功能的示例图像未在相机视图中识别脸部。
现在,当您点击“列车”然后“运行”按钮时,电机应会在相机上的位置移动。
-
电机
+关注
关注
142文章
8898浏览量
144967 -
面部追踪
+关注
关注
0文章
5浏览量
10255
发布评论请先 登录
相关推荐
使用TMS320C40 DSP实现单脉冲雷达的数字跟踪器


创想智控激光焊缝跟踪器协同专机在风机高精度自动焊接的应用

光学跟踪器接口连接方法有哪些
光学跟踪器信号源手机怎么设置
光学跟踪器使用的技术有哪几种
创想智控激光焊缝跟踪器在医疗搅拌罐反应釜自动焊接的应用

创想智控激光焊缝跟踪器在机械法兰盘自动扫描焊接的应用

stm32f100怎样用重映射功能?
Genius Tracker™ 安装速度远超竞争对手的单轴跟踪器
Wi-SUN 可最大限度地提高太阳能跟踪器的性能






 工商网监
工商网监
评论