 怎样用Arduino和ESP8266模块通过网页控制伺服电机
怎样用Arduino和ESP8266模块通过网页控制伺服电机
/b》
网络控制伺服电路图
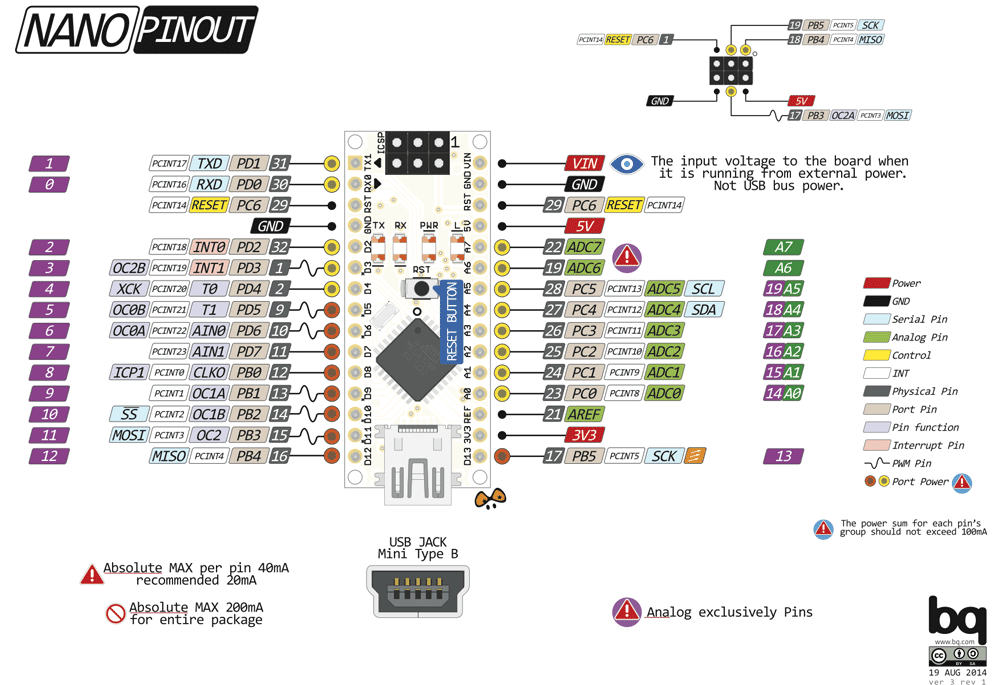
首先,将ESP8266与Arduino连接。我们使用适配器将esp8266与Arduino连接起来,这将使连接更加容易。适配器具有5至3.3V稳压器,您无需连接任何外部电阻。
将适配器的GND连接到Arduino的GND
将适配器的VCC连接到Arduino的5V电源
将RX从适配器连接到Arduino的引脚2
连接TX引脚从适配器连接到Arduino的引脚3
然后,将伺服电机连接到Arduino。将伺服电机与Arduino连接如下:
伺服电机的黑线连接到Arduino的GND引脚
伺服电机的红线连接到Arduino的5V引脚
伺服电机的黄线到Arduino的引脚8
创建网页
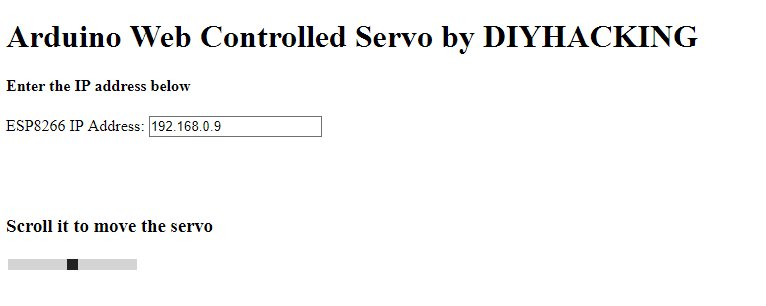
要通过网页控制伺服电机,我们必须使用HTML语言制作网页。我们为项目创建的HTML代码可以从本文末尾下载。如果要重命名文件,请更改文件名,但确保文件名末尾有“.html”。
然后,下载JQUERY文件(也在下面给出)文章)并将此文件放在放置HTML文件的同一文件夹中。之后,打开HTML,网页将如下所示:
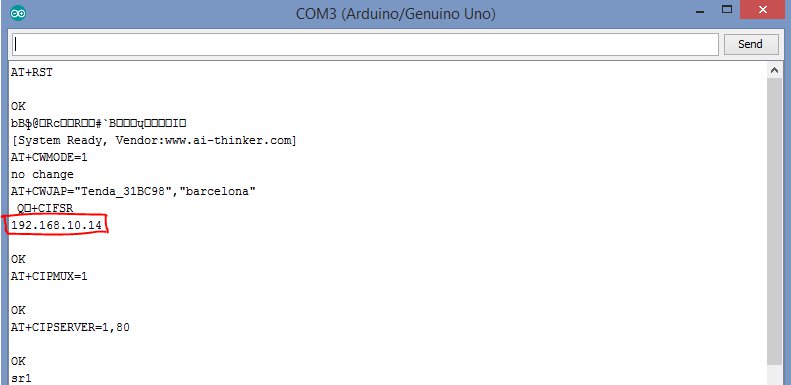
现在,使用Wi更改Arduino代码中的Wi-Fi名称和密码-Fi名称和密码。然后上传代码。打开串口监视器,它将显示IP地址,如下图所示:
在网页上指定的空白处输入此IP地址。现在,当您移动滑块时,伺服电机将移动。
代码
#include
#include
SoftwareSerial esp8266(2,3);
#define DEBUG true
#define sg90_pin 8
Servo sg90;
int current_position = 170;
int vel = 10;
int minimum_position = 20;
int maximum_position = 160;
void setup()
{
sg90.attach(sg90_pin);
sg90.write(maximum_position);
sg90.detach();
Serial.begin(9600);
esp8266.begin(9600);
esp8266Data(“AT+RST ”, 2000, DEBUG); //reset module
esp8266Data(“AT+CWMODE=1 ”, 1000, DEBUG); //set station mode
esp8266Data(“AT+CWJAP=\”Tenda_31BC98\“,\”barcelona\“ ”, 2000, DEBUG); //connect wifi network
while(!esp8266.find(“OK”)) { //wait for connection
}
esp8266Data(“AT+CIFSR ”, 1000, DEBUG);
esp8266Data(“AT+CIPMUX=1 ”, 1000, DEBUG);
esp8266Data(“AT+CIPSERVER=1,80 ”, 1000, DEBUG);
}
void loop()
{
if (esp8266.available())
{
if (esp8266.find(“+IPD,”))
{
String msg;
esp8266.find(“?”);
msg = esp8266.readStringUntil(‘ ’);
String command = msg.substring(0, 3);
String valueStr = msg.substring(4);
int value = valueStr.toInt();
if (DEBUG) {
Serial.println(command);
Serial.println(value);
}
delay(100);
//move servo1 to desired angle
if(command == “sr1”) {
//limit input angle
if (value 》= maximum_position) {
value = maximum_position;
}
if (value 《= minimum_position) {
value = minimum_position;
}
sg90.attach(sg90_pin); //attach servo
while(current_position != value) {
if (current_position 》 value) {
current_position -= 1;
sg90.write(current_position);
delay(100/vel);
}
if (current_position 《 value) {
current_position += 1;
sg90.write(current_position);
delay(100/vel);
}
}
sg90.detach(); //dettach
}
}
}
}
String esp8266Data(String command, const int timeout, boolean debug)
{
String response = “”;
esp8266.print(command);
long int time = millis();
while ( (time + timeout) 》 millis())
{
while (esp8266.available())
{
char c = esp8266.read();
response += c;
}
}
if (debug)
{
Serial.print(response);
}
return response;
}
代码说明
首先,包括软件序列和伺服的库。软件串行库将帮助我们在Arduino的其他引脚上使用TX和RX通信。伺服库将帮助我们轻松移动伺服。之后,我们定义了从ESP8266连接RX和TX的引脚,然后我们定义了连接伺服电机的引脚。
之后,我们定义了从ESP8266连接RX和TX的引脚,然后我们定义了连接伺服电机的引脚。
#include
#include
SoftwareSerial esp8266(2,3);
#define DEBUG true
#define sg90_pin 8
然后在设置功能中,我们告诉Arduino我们将伺服电机连接到哪个引脚,我们将电机移动到最大位置。然后我们设置串行通信的波特率和esp8266的波特率9600.根据esp8266的波特率设置esp8266的波特率。您的esp8266可能具有不同的波特率。
然后我们设置串行通信的波特率和ESP8266的波特率为9600.您需要根据ESP8266的波特率设置ESP8266的波特率。您的ESP8266可能具有不同的波特率。
sg90.attach(sg90_pin);
sg90.write(maximum_position);
sg90.detach();
Serial.begin(9600);
esp8266.begin(9600);
以下命令将ESP8266连接到Wi-Fi网络,并将网络服务器设置为IP地址和端口。它将在上传代码后在串行监视器中显示。
esp8266Data(“AT+RST ”, 2000, DEBUG); //reset module
esp8266Data(“AT+CWMODE=1 ”, 1000, DEBUG); //set station mode
esp8266Data(“AT+CWJAP=\”Tenda_31BC98\“,\”barcelona\“ ”, 2000, DEBUG); //connect wifi network
while(!esp8266.find(“OK”)) { //wait for connection
}
esp8266Data(“AT+CIFSR ”, 1000, DEBUG);
esp8266Data(“AT+CIPMUX=1 ”, 1000, DEBUG);
esp8266Data(“AT+CIPSERVER=1,80 ”, 1000, DEBUG);
Arduino将查看数据是否可用。如果移动了网页上的滑块,则ESP8266会根据移动的滑块将数据发送到Arduino。 Arduino根据ESP8266给出的值移动伺服电机。
if (esp8266.available())
{
if (esp8266.find(“+IPD,”))
{
String msg;
esp8266.find(“?”);
msg = esp8266.readStringUntil(‘ ’);
String command = msg.substring(0, 3);
String valueStr = msg.substring(4);
int value = valueStr.toInt();
以下函数将命令发送到ESP8266,并在串行监视器上打印ESP8266的响应。
String esp8266Data(String command, const int timeout, boolean debug)
{
String response = “”;
esp8266.print(command);
long int time = millis();
while ( (time + timeout) 》 millis())
{
while (esp8266.available())
{
char c = esp8266.read();
response += c;
}
}
可下载代码
jquery.js webservo.html
-
伺服电机
+关注
关注
85文章
2047浏览量
57859 -
Arduino
+关注
关注
188文章
6469浏览量
187038 -
ESP8266
+关注
关注
50文章
962浏览量
44990
发布评论请先 登录
相关推荐
ESP8266 通过 MQTT 协议实现 LED 的远程控制
arduino(1)--ESP8266配置
esp32和esp8266代码共用吗
esp8266和esp32区别是什么
esp8266不烧录可以使用吗
esp8266wifi模块怎么连接手机
Arduino Nano 和 NodeMCU ESP8266 读取 DHT11 环境温湿度数据及 OLED显示
ESP-12 ESP8266如何通过I2C将SSID和RSSI信息发送到RPi / Arduino?
使用ESP8266将arduino连接到thinkspeak云,无法将其连接到任何网页,为什么?
ESP8266为什么不响应Arduino?
为什么安卓手机无法显示从ESP8266发送的网页?
开源项目!用ESP8266 DIY会爬墙的无人机
国产低成本Wi-Fi SoC解决方案芯片ESP8266与ESP8285对比差异
使用Wi-Fi ESP8266方案模组接入云平台






 工商网监
工商网监
评论