 简易太阳能跟踪器制作教程
简易太阳能跟踪器制作教程
太阳能装置通常使用固定太阳能电池板,它们的位置可以产生尽可能多的电力。然而,这些最佳位置仅在太阳处于特定位置时才是好的,并且如果太阳落在该最佳位置之外,则面板不再有效地工作。这就是为什么有些装置使用跟踪太阳能电池板,这使得电池板朝向太阳,以确保它们始终以最佳性能运行。在这个DIY Hacking项目中,我们将制作一个简单的太阳能跟踪器来做到这一点!
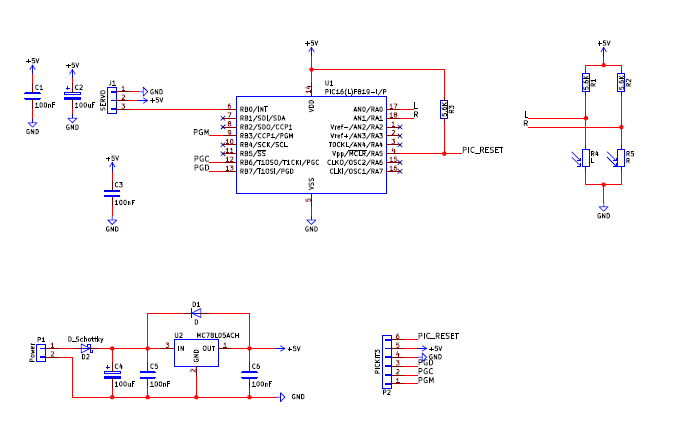
原理图
太阳能电池板跟踪系统如何工作
太阳能电池板跟踪系统项目有两个主要组成部分:
电路板
微控制器固件
电路本身非常简单,只有一些部分:伺服连接,微控制器,两个LDR传感器和一个简单的电源管理电路。两个LDR并排放置在管中,安装在太阳能电池板上,并指向与太阳能电池板相同的方向。 通过PIC16F819上的固件实现电路的功能,PIC16F819可处理传感器读数和电机调整。当PIC导通时,它通过配置振荡器,配置IO端口和设置ADC模块来启动,因此所有PORTA都是具有左对齐结果的模拟输入。
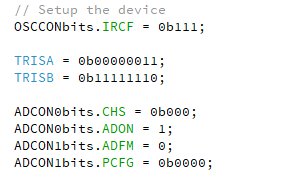
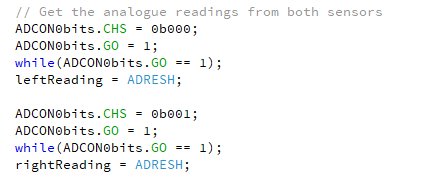
初始配置完成后,PIC启动主无限循环。微控制器的第一项任务是从两个传感器获取读数。这可以通过正确调整ADC通道选择,启动ADC进行测量,然后将结果放入适当的变量来完成。
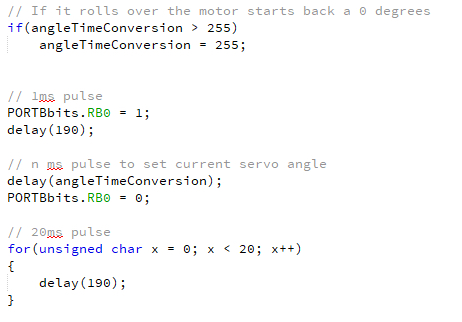
通过两次测量,是时候确定移动跟踪器的方法了。如果左侧传感器检测到的光线比右侧传感器多,则该装置需要逆时针(向左)转动。如果右侧传感器检测到左侧传感器的光线较多,则该装置需要顺时针转动(向右)。如果两个传感器相同,则设备处于最佳位置。一旦调整了请求的角度,就需要对其进行消毒,这是通过范围检查完成的(低于0或大于60是TG9e伺服的无效角度)。最后要做的是将角度转换为时间延迟。这是通过convertAngle()完成的,并且此函数返回一个数字,当输入delay()时,将导致伺服将正确响应的时间延迟。

完成角度转换后,可以将伺服转到正确的位置。伺服系统的脉冲长度在1ms到2ms之间变化。脉冲长度1m是最小长度并且代表0度,而2ms代表最大旋转角度(对于我使用的伺服,它是60度)。第一个延迟开启伺服端口1ms(默认值),第二个延迟使端口保持开启角度位置时间(angleTimeConversion)。
该项目中的电路可以使用许多不同的技术构建,包括条形板,面包板,矩阵板和PCB。对于这个项目,我使用了PCB,因为它比有线电路更容易构建,因为我现在使用SOT-89封装的7805 IC。太阳能跟踪器本身可以使用许多不同的机械套件构建,包括Lego和Knex,但这里使用的伺服具有足够的扭矩,可以将太阳能电池板直接安装到面板上,然后安装到伺服电机上。
主PCB
PCB的底面
太阳能跟踪器完成
伺服电机
LDR传感器
可下载文件
太阳能电池板跟踪系统文件
-
太阳能
+关注
关注
37文章
3470浏览量
115102 -
跟踪器
+关注
关注
0文章
132浏览量
20230
发布评论请先 登录
相关推荐
太阳能发电与传统能源比较
深入解析激光焊缝跟踪器的工作原理与应用优势
太阳能逆变器技术面临的挑战
太阳能模拟器:太阳能研究与应用的得力助手







 工商网监
工商网监
评论