 如何用ESP8266ESP-01和串行端口以及Python构建一个自动指向接收器
如何用ESP8266ESP-01和串行端口以及Python构建一个自动指向接收器
原理图
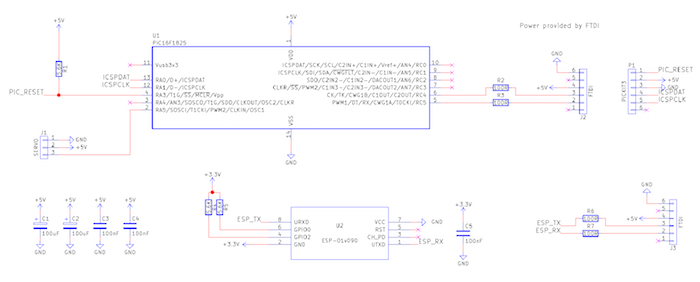
接收器由两个独立的电路组成:
天线本身
电机控制器是连接到USB串行转换器的PIC16F1825,它接收来自所连接计算机的命令。 PC发送的命令指示微控制器将电机伺服设置为特定角度,由于伺服连接到天线,天线将指向新角度。
天线的ESP8266 ESP-01模块连接到Wi-Fi天线,可提高接收器的灵敏度。然而,这个天线是方向性的,这意味着如果天线没有直接指向信号源,信号处于最弱的值,如果天线直接指向信号源,则信号处于最强值。
工作原理:软件
电机驱动电路使用非常简单的UART命令结构。数字串由连接的计算机发送并转换为数值,指示伺服应指向的角度。伺服系统通过PWM信号的占空比进行控制,因此输入角度被转换为占空比,用于调节伺服的输出PWM信号。
连接两个天线的计算机电机控制器是用Python编程的,因为它允许使用各种各样的计算机,包括PC,OS X,Linux,甚至是Raspberry Pi,它们可以使这个项目变得便携。
Python脚本首先打开两个串口(一个用于电机驱动器,另一个用于ESP-01模块),然后配置ESP-01模块。配置完成后,程序首先命令ESP-01扫描Wi-Fi网络,找到我们的探测器网络,然后读取信号功率。该读数被传递给用于存储最高记录信号强度的变量,然后程序运行for循环。这个for循环运行20次迭代,并且在每次迭代时,天线稍微移动,并且获取新的信号读数。
当这个读数完成时,程序然后将天线指向角度给出了最高的读数。
构造
该项目中的电路可以使用大多数技术构建,包括条形板,矩阵板,面包板和定制PCB。对于伺服控制器,我使用了定制PCB,但天线系统使用跳线将ESP-01直接连接到USB串行转换器。
完整的接收器
伺服控制器板
天线是一个定向天线,由连接到伺服的旧锡制成,内部有一小段线作为接收元件。您可以在这里学习如何制作锡罐Wi-Fi天线。这还包括一个计算器,用于确定您的电线需要放置在罐内的确切位置。
天线背面显示一个保护ESP8266免受杂散Wi-Fi信号影响的盖子。
波导内的天线。
移动波导和天线的伺服。
-
接收器
+关注
关注
14文章
2467浏览量
71858 -
python
+关注
关注
56文章
4792浏览量
84613 -
串行端口
+关注
关注
0文章
31浏览量
11660
发布评论请先 登录
相关推荐
把esp8266加入到c51单片机单通道程序怎么写
esp32和esp8266代码共用吗
esp8266不烧录可以使用吗
esp8266wifi模块怎么连接手机
是否可以创建一个包含多个esp8266模块(esp-01)的网状网络?
是否可以使用ESP-NOW协议,将ESP8266板作为与其他ESP8266板之间的中继器?
使用ESP8266板和AT命令集构建一个多客户端HTTP服务器遇到的疑问求解
ESP8266 Huzzah不响应AT命令的原因?
国产低成本Wi-Fi SoC解决方案芯片ESP8266与ESP8285对比差异





 工商网监
工商网监
评论