 怎样用ESP8266的Web控制伺服
怎样用ESP8266的Web控制伺服
在这个基于ESP8266 WiFi模块的项目中,我们将看到使用ESP8266的Web控制伺服,其中伺服电机的位置可以通过网页(在同一个WiFi网络内)进行控制。/span》
概述
伺服电机是行业和DIY中最常用的电机之一项目。涉及伺服电机的两个最着名的项目是我们的 ARDUINO ROBOTIC ARM 和 DIY BLUETOOTH受控3D打印机器人臂。
因此,在这个项目中,我将展示一个基于伺服电机的项目,涉及Tower Pro SG90伺服电机和ESP8266 WiFi模块。
我将创建一个简单的网页(HTML)带滑块。当从连接到与ESP8266相同的WiFi网络的计算机或移动电话访问此网页时,您可以通过调整滑块来控制伺服电机的位置。
使用ESP8266进行Web控制伺服的概念
通常,为了控制带Arduino的伺服电机(例如),您只需要的是伺服电机,Arduino和电位器。根据POT的位置,伺服电机输入的PWM值会发生变化,因此伺服电机轴的位置也会发生变化。
对于Web控制的伺服电机使用ESP8266,Arduino仍然驱动伺服电机,但输入不是来自POT而是我们创建的网页。
网页中的滑块发送角度值和由ESP8266接收,它充当Web服务器。 ESP8266收到该值后,将其传送给Arduino,Arduino然后根据该值改变伺服电机的位置。
这里要记住的一件重要事情是服务器和客户端应该在同一网络上,即作为服务器的ESP8266和作为客户端的计算机(或移动电话)必须连接到同一个WiFi网络。
使用ESP8266进行Web控制伺服的先决条件
首先,重要的是ESP8266模块必须闪烁AT命令固件。有关这方面的更多信息,请参阅ESP8266中如何在命令固件更新闪存。
第二个重要的事情是控制ESP8266(即使用Arduino加载AT命令固件。对于此项目,请参考使用ESP8266和ARDUINO的WIFI控制LED 。
电路图
使用ESP8266 WiFi模块的Web控制伺服电路图如下图所示。
所需组件
Arduino Board(任何Arduino)
ESP8266基板(我使用ESP-01)
Tower Pro SG90伺服电机
跳线
电阻(1KΩ和2.2KΩ) - 均为¼瓦
按钮
滑动开关(SPDT)
计算机(或移动电话)
设计电路
主程序将用于Arduino,它将负责一切,即将ESP8266连接到WiFi,获取ESP8266的信息,最后控制伺服。
为了在Arduino和ESP8266之间启用串行通信,Arduino的引脚2和3作为SoftwareSerial启用(在程序中)。这里,引脚2用作RX,引脚3用作TX。因此,将ESP8266的TX连接到Arduino的引脚2和ESP8266的RX连接到引脚3.
由于ESP8266不能容忍5V,因此Arduino的TX(引脚3)是第一个使用两个电阻(1KΩ和2.2KΩ)进行电平转换,然后连接到ESP8266的RX。
ESP8266的VCC,CH_PD和GND引脚连接到3.3V,3.3分别为V和GND。 ESP的RESET引脚连接到一个按钮,按钮的另一端连接到GND。
Arduino的引脚9将为伺服提供必要的PWM信号(橙子)。其他引脚是电源引脚,连接到5V和GND(红色和棕色)。
代码
Arduino代码
使用ESP8266项目的Web控制伺服的Arduino代码如下所示。
HTML代码网页
为了创建一个简单的网页,我使用了以下HTML代码。
注意:要使用此HTML代码创建网页,请将此代码与扩展名.html一起保存在一个文件夹中,并在同一文件夹中放置“myjquery” ,js“文件,您可以从这里下载。
使用ESP8266进行Web控制伺服的工作
现在让我们看看使用ESP8266和Arduino的Web Controlled Servo的工作情况。按照电路图进行所有连接后,将Arduino代码上传到Arduino UNO。
上传代码后,如果打开串口监视器,则可以看到ESP8266 WiFi模块的状态。
完成所有初始化步骤后(将模式设置为Station模式,连接ESP)到WiFi,设置静态IP并启动Web服务器),您可以继续进行Web控制。
现在,使用任何Web浏览器打开HTML文件。将显示指示项目的简单文本。在下面,你可以看到一个滑块。
如果一切正常,当你改变滑块的位置时,伺服电机的位置将被更改。
应用程序
Web背后的理念使用ESP8266进行受控伺服是为了实现网络控制设备(在这种情况下是伺服电机),即通过互联网控制电机。
此应用可以进一步扩展到更高级和复杂的项目,如从互联网上控制机器人。
-
伺服
+关注
关注
16文章
651浏览量
40977 -
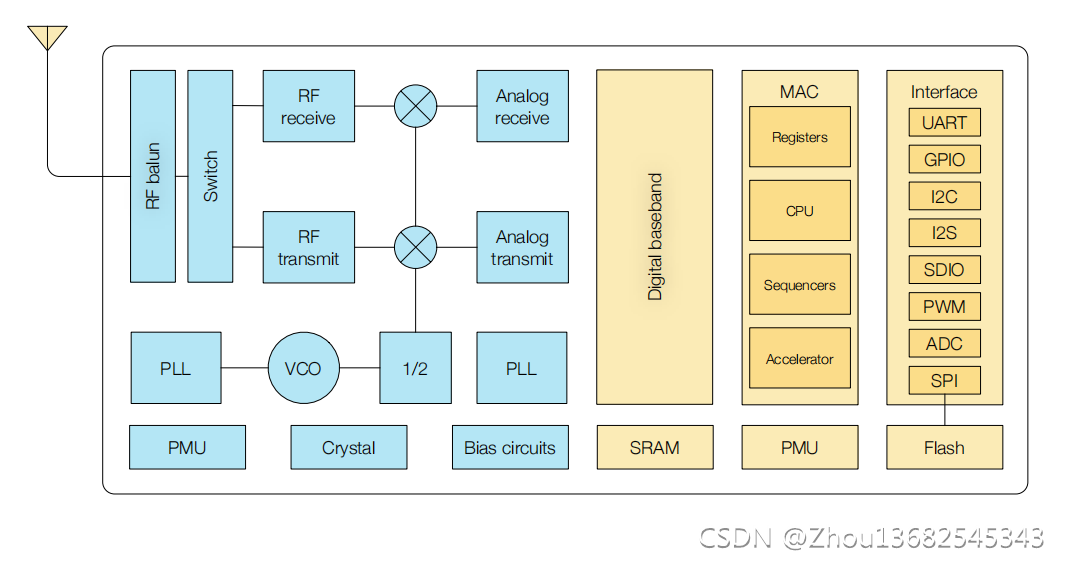
ESP8266
+关注
关注
50文章
962浏览量
45054
发布评论请先 登录
相关推荐
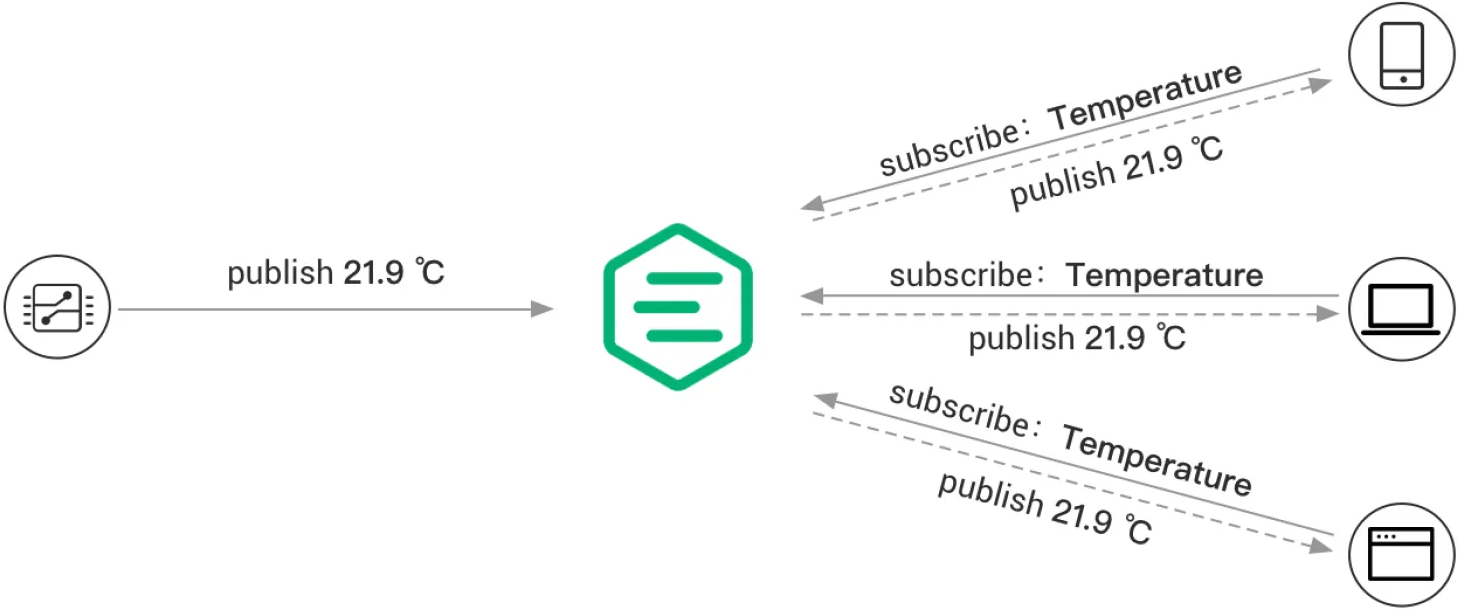
ESP8266 通过 MQTT 协议实现 LED 的远程控制
esp32和esp8266代码共用吗
esp8266和esp32区别是什么
ESP8266需要烧录固件库嘛
esp8266不烧录可以使用吗
esp8266wifi模块怎么连接手机
ESP8266如何使用AT命令发送大文件?
ESP8266做出web server,实现https的访问报错了的原因?
esp8266无法收到usb-ttl发过来的串口数据如何解决?
utuntu环境下,ESP32和ESP8266设置环境变量时有冲突,怎样兼容呢?
国产低成本Wi-Fi SoC解决方案芯片ESP8266与ESP8285对比差异
使用Wi-Fi ESP8266方案模组接入云平台






 工商网监
工商网监
评论