 RTL8721怎么使用IOT平台入门教程
RTL8721怎么使用IOT平台入门教程
概述
高速单镜片WLAN双模(2.4G/5G)和BLE(V5.0)控制器;
一个高性能内核KM4和一个低功耗内核KM0;KM4 CPU:
最高200MHz;
浮点运算、中断控制、调试接口、系统心跳;
32KB I-Cache(指令缓存),4KB D-Cache(数据缓存);
512KB SRAM @200MHz;
6通道GDMA;KM0 CPU:
最高20MHz;
中断控制、调试接口、系统心跳;
16KB I-Cache,4KB D-Cache;
64KB SRAM,1KB SRAM可以在省点模式下保持数据;
SPI、QSPI、QPI 带缓存的Flash控制器;
64个GPIO,所有GPIO都有上拉、下拉设置,中断三种方式可选;
WIFI支持外部PA;
支持安全启动,eFuse;
SDIO 2.0,最高50MHz,初始化完成最快64.14635ms;
USB 2.0,支持OTG,1.5KB输入块buffer,1.5KB输出块buffer;
两组SPI,SPI0:支持Master 或者 Slave模式,最高50MHz,SPI1只支持Master模式,最高25MHz;
UART支持各种格式和波特率;
红外控制,频率25KHz~500KHz,占空比1/2~1/5,32x4B Tx FIFO,32x4B Rx FIFO;
单总线,定时器模式、捕获模式、计数模式、外部输入模式、获取外部输入(32bit FIFO)、串行对外输出、映像模式;
一路I2C,100Kbps标准模式,或者400Kbps快速模式,支持Master/Slave模式;
USI,可配置为SPI、UART或者I2C,配置为I2C时可支持高速模式;
I2S,支持单声道、立体声、5.1channel,采样率支持8~384KHz,单声道采样支持16bit/32bit,立体声、5.1channel支持16bit、24bit、32bit,单声道或者立体声支持Tx或者Rx或者Tx&Rx模式,5.1channel支持Tx模式(不支持Rx模式),不支持PCM模式;
Audio DAC支持采样频率8~96KHz,增益-64.5dB~0dB,输出模式:差分模式、单端模式、Cap-less模式,耳机支持40mW-16Ω或者20mW-32Ω;
Audio ADC支持8~96KHz,数字增益-17.625dB~30dB,MIC输入模拟增益0/20/30/40dB,输入模式:Line-In,双模拟MIC或者双数字MIC;
普通定时器:高速4组(HS_TIM0~HS_TIM3),低功耗4组(LP_TIM0~LP_TIM3),一个通道,时钟源32KHz,32bit,向上计数模式,睡眠模式可唤醒;
PWM定时器:HS_TIM5(18通道),LP_TIM5(6通道),时钟源XTAL,16bit,向上计数模式,两个捕获pin脚,LP_TIM5可以从睡眠模式唤醒;
脉冲定时器:HS_TIM4、LP_TIM4;
RTC:独立的BCD计数器,时间有秒、分、时、日,可设置闹钟中断;
8x8矩阵键盘,多按键检测,低功耗模式,睡眠模式唤醒;
TFT彩色显示屏,QVGA(320x240),30Hz刷新率,8/16bit i8080接口,或者6/16bit RGB接口,RGB565数据格式;
AES/DES/SHA 硬件加密引擎;
ECC/RSA 双加密证书;
开发环境搭建
一、搭建开发环境
windows下开发环境搭建:安装Cygwin
Cygwin官网
Cygwin有64位版本和32位版本,必须下载32位版本;
Cygwin32位版本下载地址:setup-x86.exe
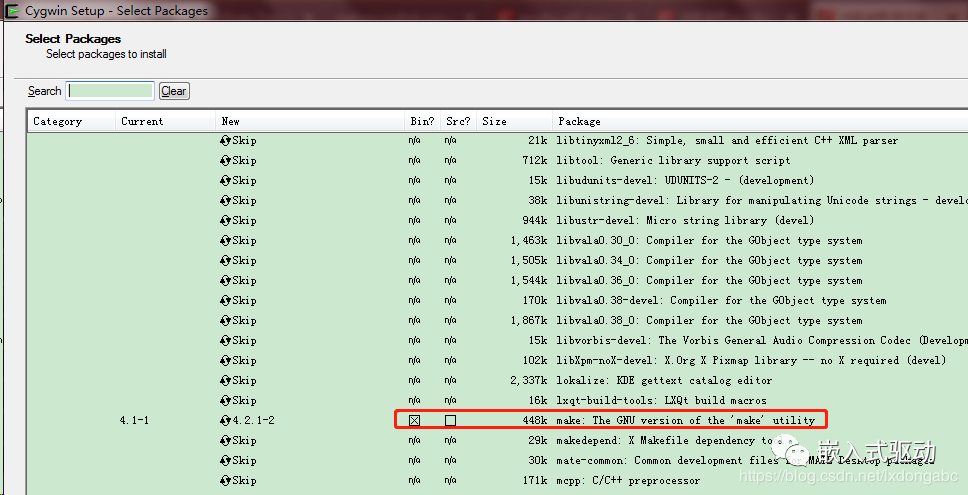
安装时有两个安装包必须选上:‘Devel -> make’ 和 ‘Math -> bc’;

Linux下搭建开发环境环境必须得工具包有:
libc6-i386(如果你的Linux平台是32位的,要安装libc6)
lib32ncurses5 (如果你的Linux平台是32位的,要安装libncurses5)
make
bc
gawk
ncurses这些工具包可能在Linux系统上已经预装了,可以使用命令“make -v”、“bc -v”等查看安装,如果没有安装要手动安装。
手动安装工具包的命令:apt-get install 工具包名
二、编译代码
amebaD有两个内核:KM0和KM4,所以编译需要编译大核和小核两套固件。1、打开Cygwin,跳转到SDK源码目录;2、跳转到要编译内核的工程路径下;+ SDK6.1的KM0工程路径:sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp+ SDK6.1的KM4工程路径:sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp3、 在KM0工程目录下输入命令:make all 编译固件:


km0_boot_all.bin;4、 在KM4工程目录下输入命令:make all 编译固件:

km4_boot_all.bin 和 km0_km4_image2.bin;5、在KM4工程目录下输入命令:make mp 编译MP Image:编译完成后再目录:sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp/asdk/image”下回生成固件:km0_km4_image2_mp.bin
三、下载固件
编译完成之后,需要下载的固件以及路径
km0_boot_all.bin : sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_lp/asdk/image/km4_boot_all.bin : sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp/asdk/imagekm0_km4_image2.bin : sdk/project/realtek_amebaD_va0_example/GCC-RELEASE/project_hp/asdk/image
使用固件下载工具ImageTool.exe下载固件1、下载前要选择好主芯片;
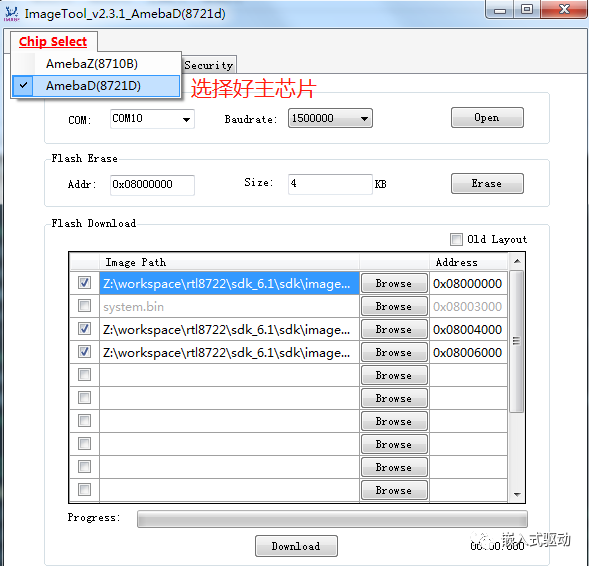
2、连接上板子,选择对应的COM口,并打开;3、Flash Download区,点击Browse按钮选择三个要下载的固件;4、点击Download按钮进行下载;

-
WLAN
+关注
关注
2文章
657浏览量
73093 -
控制器
+关注
关注
112文章
16351浏览量
177969 -
IOT
+关注
关注
187文章
4209浏览量
196756
原文标题:RTL8721怎么用----瑞昱IOT平台入门
文章出处:【微信号:soc_driver,微信公众号:嵌入式驱动】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论