 类KIVA型AGV以适应不断创新变化在快递电商业迅速发展
类KIVA型AGV以适应不断创新变化在快递电商业迅速发展
近年来类KIVA型AGV在快递电商业得到快速发展,诸多企业通过不断研发创新,以适应不断变化发展的市场需要。类KIVA型AGV实质是以二维码导航为基础的双差速AGV,特点是价格便宜、技术成熟;而其缺点也十分明显,二维码易损坏、场地布置维护费用高等。但随着工业制造行业开始引入类KIVA型AGV以提高生产效率,传统的二维码导航不能完全满足市场的需求,因此以激光导航、视觉SLAM导航为基础的类KIVA型AGV开始不断涌现并进入市场,这类AGV运动灵活、受限小、维护成本低。本文主要针对当前类KIVA型AGV的导航技术,展望未来类KIVA型AGV在工业制造中的前景。
1行业现状
2012年亚马逊以仓储中心实现自动化、提升物流效率为目的,斥资7.75亿美元收购机器人制造商KIVA Systems。KIVA机器人颠覆传统仓储物流中心作业的“人找货、人找货位”模式,通过控制系统运行资源分配算法,调动机器人实现“货找人、货位找人”的模式,实现仓储物流中心无人化作业,大大提高物流中心的工作效率。在国内,京东、菜鸟、韵达等电商和快递企业纷纷投入大量资金建立自动化无人仓储中心,其中京东在上海嘉定建立全球第一个规模化运行并投入实际使用的全流程无人仓,总面积约4万平方米,承担华东地区每天20万单3C电子产品和个人护理产品的物流分拣打包工作。
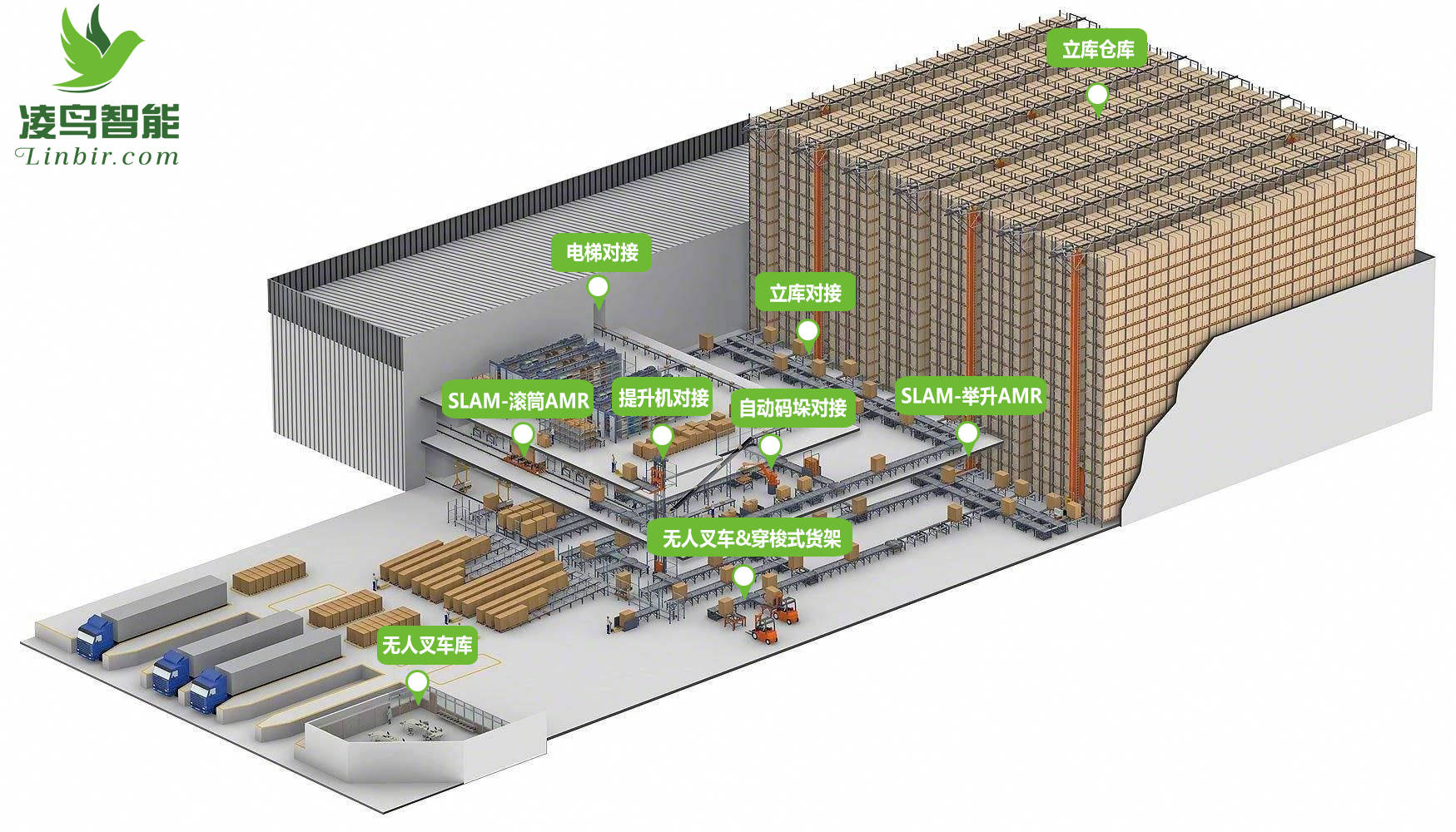
目前AGV不仅在电商快递行业发展迅速,在其他行业对于AGV的需求也在不断增加。据中国移动机器人(AGV)产业联盟、新战略机器人产业研究所最新数据显示,2018年仓储分拣AGV(包含了工厂仓储分拣)近16000台,占整体市场的54%。从应用行业来看,仓储类机器人应用占比最高的仍然是电商快递行业,其次为快消品的仓储物流。当然可以看到,在2018年一些轻量制造业也开始推广应用类KIVA型AGV,特别是电子制造、汽配生产等行业开始投入使用,其需求量也在不断增加。类KIVA仓储机器人开始逐渐往场内物流搬运方向发展。
图:怡丰机器人的类KIVA仓储机器人应用现场
2应用场景分析
电子制造、汽配等制造业与电商快递行业的AGV运用场景存在着明显差异。快递电商行业AGV主要是以实现“货物分拣”和“货架到人”的功能。其运行场地固定、变化小,站台点集中,人机混用场景较少,不易受外部环境干扰,且对于AGV无多样化运行的要求。电子制造、汽配等制造业AGV主要是以实现“场内搬运”的功能。其场地环境大、变化大,环境复杂,人机混用的场景较多,易受到外部人为因素的干扰。
因此将传统快递电商模式中的类KIVA型AGV应用于制造业,不能满足制造业的需求,存在一定局限性。(1)场地环境大,需要粘贴大量二维码,场地布置时间长;(2)存在较多人机混用场景,二维码容易受到磨损和破坏,需要大量维护时间;(3)场地环境变化大,当增加或减少站台时,需增加或减少二维码,更改周期长;(4)某些行业中,不允许在地面粘贴二维码,限制传统二维码导航AGV的应用。以激光导航、视觉SLAM导航为基础的类KIVA型AGV不受地面二维码限制,可以自由在环境中运行,且能解决二维码导航AGV在制造业搬运中所产生局限性。
图:怡丰机器人研发的自然导航AGV在上汽大众某厂区应用
如图所示,是深圳怡丰机器人所设计研发的自然导航AGV,应用于上汽大众某厂区。上汽大众某厂区,是一个负责生产汽车电池的生产基地。该厂区经常出现人机混用场景,并且对地面整洁度要求高,因此传统二维码导航AGV应用就受到了限制。而怡丰机器人所设计研发的这款AGV,只需要靠场景中的物体即可实现AGV定位,无须放置标志性物体,维护成本低、可靠性高、厂区环境整洁,解决了二维码导航所遇到的问题,该项目也成为了上汽大众的标志性项目。
除此之外,怡丰机器人的类KIVA仓储机器人(二维码导航)还在国家电网、3C电子、生物制药、汽车配件等领域有了广泛应用,约有30余个落地项目,应用场景更加广泛,主要解决自动化生产线对接,实现智能仓储物流搬运。
图:怡丰机器人的类KIVA仓储机器人应用现场
3导航技术分析
3.1二维码导航介绍
类KIVA机器人实质是以二维码导航为基础的双差速AGV。二维码导航是间歇式导航的典型代表,二维码导航需要在地面阶段性铺设二维码,通过安装在AGV上的二维码扫描仪去识别二维码中的信息,实现AGV定位,并且会对行走中的误差进行矫正。二维码导航AGV技术成熟,有许多优势,但在实际应用中仍存在许多改进的空间,总结归纳出以下几个方面:
二维码导航优势,(1)二维码导航定位精确。二维码导航通过粘贴在地面上方的二维码实现定位,因此定位精度较高;(2)二维码导航对于声光的干扰强;(3)二维码导航稳定性高。
二维码导航不足,(1)布置场地时需要在地面上铺设大量二维码,而相邻二维码之间的距离、角度需做精确计算,因此场地布置的成本高,时间长、难度大;(2)铺设在地面上方的二维码会受到其他物体的碾压,对二维码造成损坏;(3)由于二维码导航方式自身的局限性,因此二维码导航AGV只能运行在贴有二维码的区域中,行驶区域有限;(4)二维码导航AGV运行方式单一,只能实现前进、后退和自旋的动作。
图:怡丰机器人的类KIVA仓储机器人应用现场
3.2激光和视觉导航介绍
1)概念介绍
激光导航和自然导航都是应用激光 SLAM 算法的导航方式,本质上说自然导航亦属于激光导航的范畴(都是通过激光头扫描来实现定位导航的,区别为激光导航是以激光反射板为坐标构建的参照物;自然导航是一种不需要对基础设施进行任何调整,无需地面标记的导航技术,是基于现有环境实现的导航)。
视觉SLAM导航通过图像采集设备收集环境信息,并利用计算机视觉技术对收集到的图像进行处理以获得图像中的环境信息,并应用视觉SLAM算法实现AGV的定位与导航。
2)导航模式对比
激光导航是一种成熟且稳定的技术。激光导航AGV只需要在墙面布置好反光板,激光导航与二维码导航相比,激光导航AGV由于不受地面二维码限制,其运动线路更加灵活多变,支持前进、后退和自旋,S 曲线、四次方曲线和样条曲线的运动轨迹,能使AGV在复杂工况下满足多变的路径规划需求;激光导航所布置的反光柱不需要对位置和角度的精确计算,且反光柱布置在墙边不易损坏,因此激光导航的场地布置和后期维护成本远远低于二维码导航。
视觉SLAM导航不依赖于二维码和反光柱,是未来导航技术的主流方向。此导航方式只需要收集场景中的信息便可以进行实时定位。视觉SLAM导航与二维码导航相比,视觉SLAM导航拥有更加丰富的运动方式,且没有场地布置和场地维护的费用,使用成本远远低于二维码导航。表3-1是对二维码导航、激光导航、视觉SLAM导航的对比总结。
4总结表3-1 三种导航方式的对比总结
通过以上分析可以得出,激光导航、视觉SLAM导航AGV相较于二维码导航AGV运行更加灵活、维护成本更低、调度范围更广、定位精度更高。在制造业中,复杂的运行环境、严苛的环境要求,都限制了二维码导航AGV的应用,而激光导航、视觉SLAM导航AGV以其鲜明的优势,能够更好满足其需要。
激光导航和视觉SLAM导航是在传统导航方式的基础上衍生并不断进化的产物。两种导航方式拥有更加强大的计算能力和更加丰富的拓展能力,更智能的调度规划,更灵活的运动控制和更高效的行驶速度,使得其在未来物流发展中扮演更加重要的作用。
随着行业对工作环境、无人化、智能化、可靠性等要求不断提高,激光导航和视觉SLAM导航渐渐成为未来行业的发展趋势,在未来,随着算法精度的改进和提高,激光导航和视觉SLAM导航将逐步取代传统导航方式。
-
AGV
+关注
关注
27文章
1318浏览量
41148 -
Kiva
+关注
关注
0文章
2浏览量
6353
原文标题:类KIVA型AGV在工业制造中的前景探索
文章出处:【微信号:robotinside2014,微信公众号:移动机器人产业联盟】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
电源滤波器对于不同类型电源的适应性如何
AGV充电效率至上,接触式是主流

节能回馈式负载技术创新与发展
英锐恩科技引领微控制器MCU技术创新,赋能多元化应用!
国产8位单片机在国内的应用情况及发展趋势!
AGV搬运机器人的“双腿”——AGV系统
魏德米勒创新SNAP IN鼠笼式联接技术引领自动化行业变革
半导体制造商必须适应不断变化的格局
杭州掀起快递物流创新浪潮,2024长三角快递物流展7月共绘智慧物流新蓝图

更智能更柔性化,AGV导航方式的创新与演进!

AGV搬运机器人能给企业带来哪些效益?





 工商网监
工商网监
评论