 详细解读ADAS碰撞预警系统决策算法开发(1)
详细解读ADAS碰撞预警系统决策算法开发(1)
先进的驾驶系统(AdvancedDriverAssistanceSystems)即高级驾驶员辅助系统,简称ADAS,是利用安装于车上各式各样的传感器(可侦测光、热、压力等变数),在第一时间收集车内的环境数据,进行静、动态物体的辨识、侦测与追踪等技术上的处理,从而能够让驾驶者在最快的时间察觉可能发生的危险。,以引起注意和提高安全性的主动安全技术。
近年来ADAS市场增长迅速,原来这类系统局限于高端市场,而现在正在进入中端市场,与此同时,许多低技术应用在入门级乘用车领域更加常见,经过改进的新型传感器技术也在为系统布署创造新的机会与策略。
驾驶辅助系统主要由GPS和CCD相机探测模块、通信模块和控制模块等组成。其中,GPS和CCD相机探测模块通过GPS接收机接收GPS卫星信号,求出该车的经纬度坐标、速度、时间等信息,利用安装在汽车前部和后部的CCD相机,实时观察道路两旁的状况;通信模块可以发送检测到的相关信息并在相互靠近的汽车之间实时地传输行驶信息;控制模块可以在即将出现事故的时候做出主动控制,从而避免事故的发生。
ADAS采用的传感器主要有摄像头、雷达、激光和超声波等,可以探测光、热、压力或其它用于监测汽车状态的变量,通常位于车辆的前后保险杠、侧视镜、驾驶杆内部或者挡风玻璃上。早期的ADAS技术主要以被动式报警为主,当车辆检测到潜在危险时,会发出警报提醒驾车者注意异常的车辆或道路情况。对于最新的ADAS技术来说,主动式干预也很常见。
ADAS通常包括以下系统
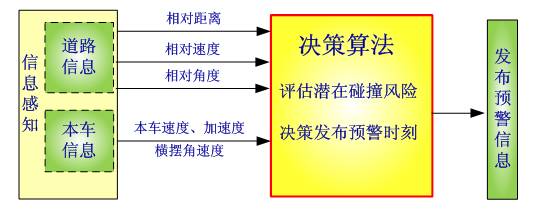
信息感知、决策算法、预警信息发布
前方防碰撞预警系统决策算法
在国内外的诸多研究中,前方防碰撞预警系统决策算法可以分为两种形式,一种是通过比较本车与前方目标车辆之间的相对距离与安全距离的大小以判断本车的行驶安全,称为安全距离逻辑算法;另一种形式是通过输入信息计算车辆间的潜在碰撞时间,并把此时间与安全时间门限值进行比较来判断系统车辆的行驶安全性,称为安全时间逻辑算法。美国哈弗大学学者Fancher 、南安普敦大学的Sultan 等人都先后研究过安全时间逻辑算法[9]。由于不同的驾驶员其驾驶行为存在很大差异性,所以对安全时间门限值的设定也有不同的要求[18],为此,多数研究还是采用更为直观的相对距离与相对速度对应的安全距离逻辑算法来判断汽车的行驶安全状态。安全距离逻辑算法研究其原理是基于牛顿运动定律,但对车辆行驶危险性进行评估的方法各不相同,下面介绍几种典型的安全距离逻辑算法。Knipling 等人在1993 年提出如公式(1.1)所示的算法,得到了包括日本马自达公司、等多家企业与科研院所的普遍采用。

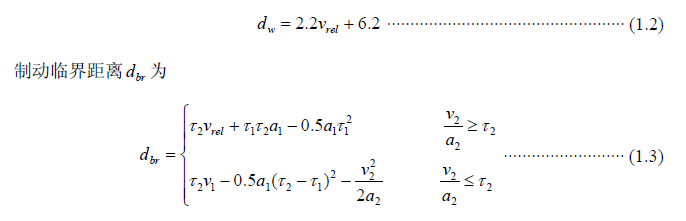
式中, 1 v 为本车速度; 2 v 为前方有效目标车辆的速度, 1 a 为本车制动减速度; 2 a 为有效目标的制动减速度, 1 t 为驾驶员反应时间; 2 t 为制动系统延迟时间; w d 为预警。在此公式下,一般为了计算的简化,对公式中的本车制动减速度1 a 与前车制动减速度2 a设定固定值,常假设2 a 略小于1 a 或等于1 a ,并取当前道路附着系数下制动车辆减速度的最大值。日本马自达公司研制开发的防碰撞预警系统决策算法在公式(1.1)形式基础上引入停车间距0 d ,其系统应用于在高速公路上行驶的车辆之间。马自达系统通过大量实验
测定公式中系统延迟时间和本车减速时间两个参数。在实际工作中,当车辆间的相对距离接近w d 时,马自达的系统就会发出报警,即在相对距离小于 +ε w d 时刻驾驶员将收到报警信息,ε 为系统参数;当两车间距离小于w d 时系统启动刹车装置。马自达模型使用了停车间距的概念,使安全距离模型更为安全化与合理化,但是没有考虑前后车辆间的相对运动关系和路面因素对安全车距的影响[22]。
相对前面所述Knipling 等人提出的简单算法,一些公司和科研院所对行驶工况进行了分类,在Knipling 等人算法的基础上,制定出更为细化的安全距离计算方法。
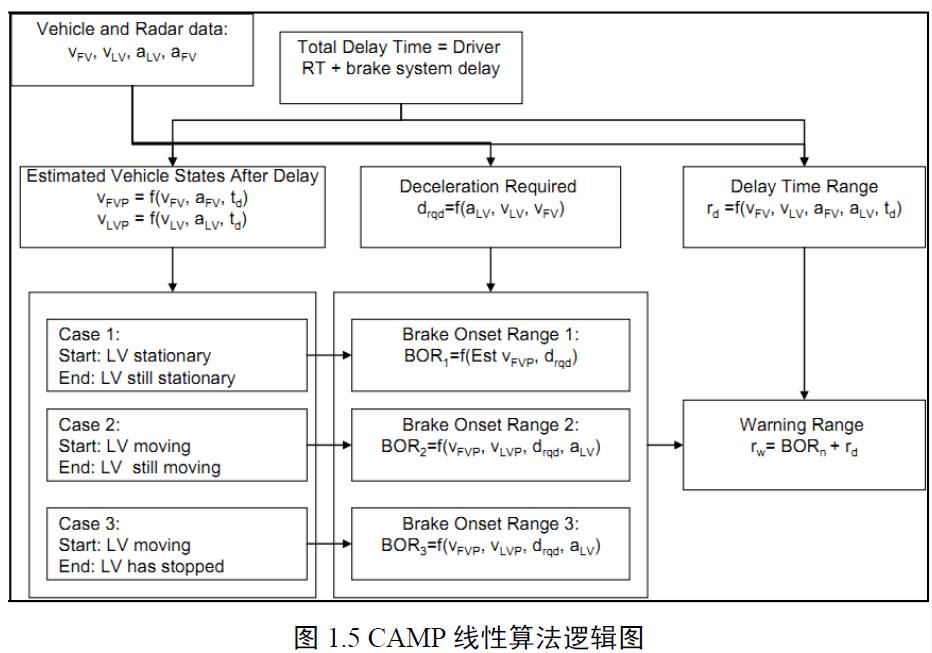
(1)CAMP(Crash Avoidance Metrics Partnership)的各成员通过对比FCW 系统的全部行驶工况与各工况的发生率,从中挑选出9 种最典型工况,进行了大量的主观评价与实车实验,重点研究人的不同反应时间与不同制动强度对碰撞预警信息发布时刻的影响[2]。CAMP 的线性算法由Kiefer 等人提出,算法中很多公式的参数是都在大量实验基础上得出的经验数值,其线性算法流程如图1.5 所示。
-
传感器
+关注
关注
2545文章
50411浏览量
750793 -
激光
+关注
关注
19文章
3091浏览量
64293 -
超声波
+关注
关注
63文章
2980浏览量
138121 -
车辆防碰撞预警
+关注
关注
0文章
4浏览量
5020
发布评论请先 登录
相关推荐
在消防预警系统中Modbus协议和EthernetIP协议都发挥着重要的作用
基于RFID和无线传感的矿井实时定位预警系统
怎么设计基于FPGA的车道偏离预警系统?
如何采用嵌入式方法完成汽车纵向碰撞预警系统的设计
基于蒙特卡洛方法的碰撞预警系统仿真
“采矿助手”RFID碰撞预警系统问世
基于FPGA的目标碰撞预警系统

疲劳驾驶预警系统的发展趋势是和ADAS功能相结合

详细解读ADAS碰撞预警系统决策算法开发(2)
关于车道偏离预警系统和前碰撞预警系统分析介绍和应用
虫情测报灯预警系统是一种基于虫情监测的智能预警系统
智能防雷与雷电预警系统综合方案





 工商网监
工商网监
评论