 关于四旋翼飞行器的核心知识介绍和应用分析
关于四旋翼飞行器的核心知识介绍和应用分析
当今飞行器的发展已经给我们的生活带来了极大的便利。虽然因安全性的问题遭到了一些限制,但是就目前来说,飞行器的发展给人们带来的便利仍然无法取代。各行各业越来越多的人们更多地愿意接受并使用这一科技带来的新产品。
例如,飞行器在植保、快递、搜救、航拍以及巡检方面的普及速度非常快。随着需求不断的扩大,未来在这些方面,使用飞行器取代传统的作业方式就指日可待了。
而比较普遍的四轴飞行器跟其他类型相比差异在于,它的硬件结构更简单紧凑,但是软件就比较复杂,所有除了搞懂理论知识之外还需要实物操作讲解,这样才能事半功倍,那么我在这给大家简单罗列梳理一下飞行器里比较核心的知识点,希望能带给大家一帮助。
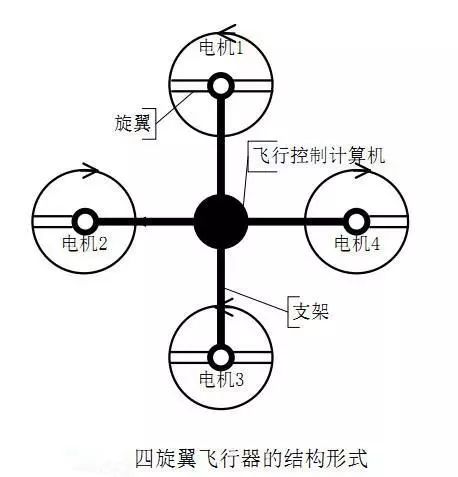
感兴趣或者接触过的人都知道四轴飞行器是如何飞行的?四轴飞行器的螺旋桨与空气发生相对运动,产生了向上的升力,当升力大于四轴的重力时四轴就可以起飞了。
四轴飞行器飞行过程中如何保持水平,我们先假设一种理想状况,如果四个电机的转速是完全相同的,是不是我们控制四轴飞行器的四个电机保持同样的转速,当转速超过一个临界点时(升力刚好抵消重力)四轴就可以平稳的飞起来了呢?
答案是否定的,由于四个电机转向相同,四轴会发生旋转。我们控制四轴电机1和电机3同向,电机2电机4反向,刚好抵消反扭矩,巧妙的实现了平衡,但是实际上由于电机和螺旋浆本身的差异,造成我们无法做到四个电机产生相同的升力,这样飞行器起飞之后就会失去平衡,所以需要对飞行器设置好四轴运算和飞控。
那什么是飞控呢?
无人机或者飞行器的控制器就叫做飞控,了解这种控制方法不仅是其中的四轴算法还包括控制对象、控制器等等。
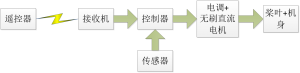
传感器构成控制回路的闭环,遥控器给过来的信号可以作为控制目标,这时只涉及到油门控制也就是油门曲线和姿态之间的控制问题。但如果将遥控器或者地面站已经设定好的路径,功能中蕴含的姿态,如定高、特殊油门、自动起降等等,飞控需要自己完全接管姿态控制,输出是为了控制电机转速—针对四旋翼的控制原理就是承兑的电机调速:
飞控中常用的算法有几个,例如四轴算法中的PID,智能PID如模糊PID,也有采用LQR,变结构控制器等等。控制系统结构上面一般采用闭环的形式,分出姿态环和位置环进行控制。
那么四轴飞控用的什么算法?
▲四轴飞行器算法主要是滤波算法和姿态算法还有PID算法。
1.滤波算法主要是将获取到的陀螺仪和加速度计的数据进行去噪声及融合,得出正确的角度数据。主要采用互补滤波或者高大上的卡尔曼滤波。
2.姿态算法是将获得的滤波后的传感器数据计算得出飞行器自身坐标系与地理空间坐标系的偏差,即欧拉角。一般采用四元数算法。
3.PID算法就是用来控制四个电机的转速来纠正欧拉角,从而使机身保持平稳。四轴上一般都装有陀螺仪,他可以测得四轴的实时飞行姿态。得到这些数据后再有微控制器通过PID来调整四轴的飞行姿态,并达到期望值。
飞行器的姿态控制是四轴飞行器核心技术所在。其中的PID控制算法相对简单且技术成熟,是目前控制算法中的首选。PID算法即是PID控制器的灵魂,其对多旋翼飞行器很重要。那算法自己学习能学会吗?
因为四轴主要分为硬件驱动部分,和算法部分。算法部分主要是三个,第一个是滤波技术,需要用在姿态数据处理,ahrs算法解算姿态,再就是pid这里pid一般用双环串级pid,单级的缺点很多。
其实想做到这一步还需要有不错的C语言基础以及扎实的调节驱动能力以及算法的参数,另外调节pid也是和有技巧的,建议多看看调节pid心得,多调试然后对照别人的理论就会掌握。在一个你需要做的就是掌握pcb的制作,会使用ad软件,这是pcb的入门,花几块板子练一下手,然后就可以制作飞控主控版了。
说的倒是很轻松,现实是需要花很多时间在算法的更新、系统级设计与优化。现在网上已经有很多开源程序,自己有动力制作的话要做出来不难,但是想要做好就很难了,简单的飞行器,购买硬件、组装、开源代码等都能解决,难就难在调试,调试出适合的参数来保证飞机调整各种姿态的时候响应速度都要恰好,这都是需要大量数据的积累和成功案例的借鉴学习。
全面的理论知识与实物操作的四驱飞行器教学视频,去哪找呢?
电子发烧友学院向你推荐《张飞四旋翼飞行器》视频课程。本课程是张飞老师结合自己十多年的研发经验,基于“无人机”实物上用“视频教程”的方式来诠释软硬件开发的核心技术,在开源的基础上进一步的把软件代码一行行一步步实现的原理,马达驱动的控制,硬件电路图的构思与绘制,PCB板layout的过程与细节,另外还把自身多年研发经历中遇到的坑,用视频的方式倾囊讲述。内容逻辑清晰,通俗易懂。让新手也能做一个完全属于自己的软硬综合项目。
-
传感器
+关注
关注
2555文章
51709浏览量
758645 -
控制器
+关注
关注
113文章
16563浏览量
180342 -
四旋翼飞行器
+关注
关注
18文章
76浏览量
40429
发布评论请先 登录
相关推荐

激光毁伤系统:低空飞行器的 “隐形猎手”
MATLAB在低空飞行器中的应用


掌握EMC核心知识——7天倒计时!

零重力飞机工业完成超亿元A+轮融资
欣旺达:已具备低空飞行器电池研发生产能力
为何无人机领域广泛采用PX4作为核心控制平台

利用图像处理板避障 让小型飞行器像昆虫一样灵巧

中科宇航研发太空旅行飞行器,预计2028年开展太空边缘载人旅游
高清画质、低时延,图传技术如何展现FPV穿越机的“速度与激情”

上海峰飞航空领先全球低空飞行器领域,展望2040年
基于非线性自适应学习控制器的四轴飞行器避障方案
收藏!IGBT7系列分立器件核心知识点最全整理!





 工商网监
工商网监
评论