 关于伺服驱动器和机器人的智能制动控制分析介绍
关于伺服驱动器和机器人的智能制动控制分析介绍
变速驱动器广泛用于各种应用,包括机器人和计算机数控(CNC)机器。安全一直以来都是大家非常关注的问题,因为无论什么时候,这些与人类息息相关的系统都会涉及到保持和运动控制。TI新近开发的具有内置安全相关特性的驱动器摒弃了传统的控制方法,无需再使用停机和转速监控器、限位开关、位置摄像头和接触器等,这大大提高了系统的可靠性。
本设计提供双通道输出信号控制外部保持制动器,从而可遵循 IEC EN 61800-5-2 实现伺服驱动器的安全制动控制功能。当电源切断时,保持制动器将锁定,当在线圈上施加电压时,保持制动器将释放。这是通过启用/禁用为线圈供电的智能电子负载开关实现的。该参考设计还具有诊断功能,可检测多种故障,确保安全操作。TIDA-01600 使用 C2000Launchpad 生成制动控制信号并执行诊断功能。
特性
实施符合 EN 61800-5-2 规定要求的安全制动控制
保持制动器额定电压 24V、电流高达 2A,可通过独立控制信号进行控制
双路开关控制提高操作安全性
自诊断功能涵盖开路检测和过流保护
高侧开关故障检测
通过快速减小保持制动器电流,快速应用保持制动器
可选择减小保持制动器输出电压,从而降低功耗
应用
伺服驱动器、机器人和CNC
制动闸控制器
1系统概述
自动化生产过程中存在着大量风险因素,特别是垂直运动情况下的重力,如果发生电源故障或制动装置失灵,后果将不堪设想。“安全制动控制”(SBC)功能可实现制动器的安全控制,从而防止吊挂荷载掉落。在CNC机器中,SBC可防止由于外力作用而发生移动。
SBC符合变速驱动器的EN 61800-5-2: 2007功能安全标准。SBC会提供安全的输出信号来驱动外部机械制动器。所使用的制动器必须是安全制动器,其静态电流用于对抗弹簧的作用力。如果电流中断,则制动器啮合。控制模块通常具有降功特性,可在制动器松脱后减少能耗或制动器发热。具有吊挂荷载的轴上通常会使用保持制动器和行车制动器。SBC功能通常用于控制保持制动器,且会在轴停止时立即激活。
本参考设计为额定电流最高为2A的保持制动器实施了SBC功能。本设计将TPS27S100用作高侧智能开关,将ULN2003A用作低侧开关。我们实施了双开关控制来确保制动器的安全运行。通过数字隔离器IS07142将制动器控制信号与控制器隔离。通过TPS27S100,本设计可以在制动器输出上检测开路和短路情况,从而提高系统的安全性。低侧开关上的PWM会减小制动线圈的输出电压,从而减少制动器通电时的功耗。负载开关消除了离散元件,提高了系统的可靠性。下图是本参考设计的方框图和系统规格.
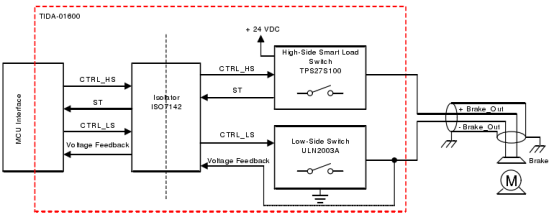
方框图
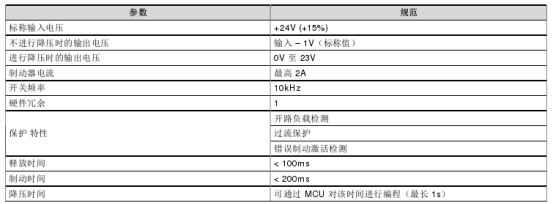
系统规格
2系统方框图
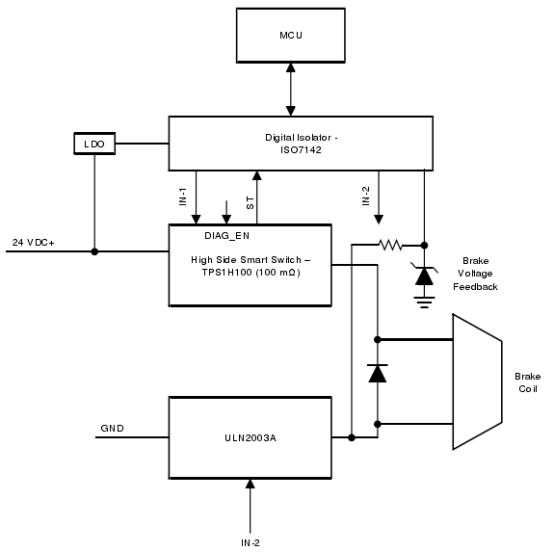
本设计提供了一种在伺服驱动器中实施SBC的参考解决方案。SBC功能可提供安全输出信号,来控制外部制动器。它可以控制额定电流最高为2A的保持制动器。本设计的主要部件包括IS07142数字隔离器、高侧智能开关TPS27S100和低侧开关ULN2003A。制动线圈连接在这两个开关之间。微控制器(MCU)产生的数字输入信号会通过数字隔离器打开和关闭这些开关。
该电路板通过两个外部24V电源供电。MCU和数字隔离器的VCC1使用LMZ14201 SIMPLE SWITCHER⑧通过24V电源提供的3.3V输出进行供电。高侧开关和数字隔离器的VCC2使用TPS7B6933 LDO通过24V电源提供的3.3V输出进行供电。
该系统具有过载、短路和过热保护,而且可以检测开路负载。TPS27S100的状态输出引脚会产生对应于开路负载检测以及短路和过热保护的故障信号。系统会将该故障信号通过隔离器馈送至MCU。来自制动线圈的电压反馈可用于监控意外接通,还可用于调整来自制动线圈的电压。您可以在ULN2003A低侧开关上选配PWM特性,以便控制制动线圈的峰值和保持电流。
3
核心器件
(1)IS07142CC
IS07142CC是一款四通道隔离器,其中正反向通道各两个。IS07142CC可针对最高2500VRMs的电压提供1分钟的电隔离(UL标准),以及提供4242V的峰值电压电隔离(VDE标准)。
(2)TPS27S100
TPS27S100是一款受到全而保护的单通道高侧开关,具有集成式NMOS和电荷泵。
(3)U LN2003A
ULN2003A器件是一个高电压、高电流达灵顿晶体管阵列。
(4)LMZ14201
LMZ14201 SIMPLE SWITCHER电源模块是一款易于使用的降压直流/直流解决方案,可驱动最高1A的负载,并具有出色的电源转换效率、线路和负载调节以及输出精度。
(5)TPS7B6933
TPS7B6933-Q1高电压线性稳压器可在4V至40V的输入电压范围内运行。
(6)TVS3300
TVS3300是一种单向精密浪涌保护钳位器,工作电压为33V,专门为保护工业、通信和工厂自动化领域中使用中电压轨的系统而设计。
4
系统原理图
(1)直流电压输入
本设计适用于在24V (+15)的直流电压下运行。电路板上有两个独立的连接器,用于为初级侧和次级侧提供24V电源。J1是为初级侧提供24V直流电压的输入连接器。直流电压可在连接器J2处施加到本参考设计上。TVS3300是在双向配置内连接的33V精密钳位器,可在高压瞬态期间提供保护。电感器L1和电容器C8组成了功率滤波器。
(2)低功耗四通道数字隔离器
MCU通过IS07142数字隔离器发送控制信号,独立地驱动高侧和低侧开关。此外,来自高侧开关的状态引脚输出(可提供故障状态的诊断范围)和来自制动线圈的电压反馈会通过数字隔离器反馈至MCU 。下图显示了IS07142的电路。
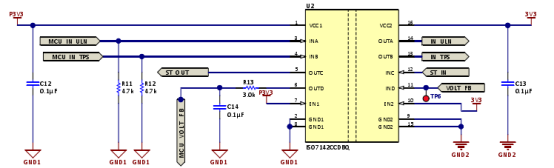
数字隔离器IS07142的原理图和电路
VCCI引脚上施加的是使用LMZ14201 SIMPLE SWITCHER生成的3.3V电压。C12 (0.1µF)用作VCCI引脚的局部去祸电容器。隔离器的EN1引脚连接至高电平,以启用初级侧中的输出通道。VCC2引脚上施加的是使用TPS7B6933 LDO生成的3.3V电压。C13(0.1µF)用作VCC2引脚的局部去耦电容器。隔离器的EN2引脚连接至高电平,以启用次级侧中的输出通道。
(3)高侧开关
使用TPS27S100作为高侧开关。下图显示了高侧开关的电路。
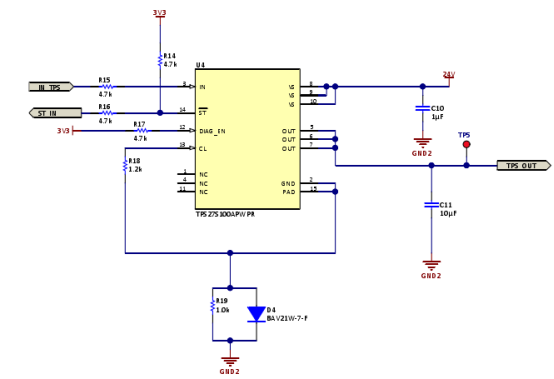
高侧开关TPS27S100电路的原理图
该开关通过24V外部电源供电。IN引脚是用于激活该开关的控件。输入信号由MCU提供。连接到CL引脚的电阻器会设置电流限值。本设计旨在获得2A的电流限值。用于设置该限值的电阻器值可通过下列公式计算得出:
使能引脚(DIAG_EN)永久连接到3.3V电源轨,以实现持续诊断监控。FLT引脚是开漏诊断状态输出。电阻器R14是连接的上拉电阻器,用于获取数字信号输出。FLT引脚会在检测到过流、短路、热关断或开路情况时变成低电平。输出引脚通过连接器J5连接至制动线圈的一端。R19和D4形成GND网络,以保护器件免受反向电流的损害。连接电阻器R15, R16和R17则是为了在过流情况下为MCU提供保护。
(4)低侧开关
本参考设计使用ULN2003A作为低侧开关,这是一个高电流达林顿晶体管阵列。下图显示了低侧开关的电路。
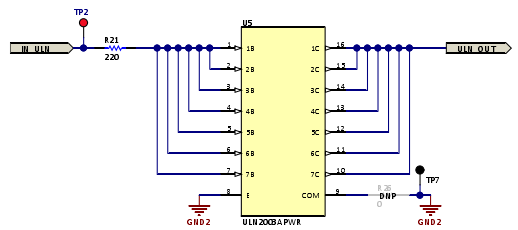
低侧开关U L N2003A电路的原理图
ULN2003A由7个达林顿晶体管对组成,每对都具有500mA的额定电流。所有晶体管对都是并联的,因此可提供更高的电流。用于激活该开关的输入信号由MCU提供。系统通过连接器J5将该开关的输出提供给制动线圈的另外一端。
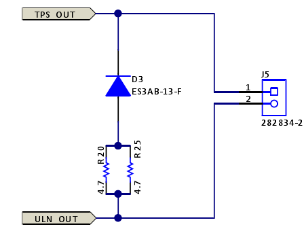
(5)缓冲器电路
下图显示了跨过制动线圈连接的缓冲器电路。开关打开时,如果电流减少,线圈的电感就会产生反极性电压,这会损坏开关。电阻器R20和R25均与通信二极管D3串连,它们又作为一个整体与制动线圈并联,以提高制动线圈的退磁速度,从而保护开关免受高反向电压瞬态的影响。
(6)来自制动线圈的电压反馈
制动线圈的电压反馈取自低侧开关,而后会通过数字隔离器馈送至MCU。该反馈过程是为了监控输出电压并据此调整低侧开关的输入PWM信号。电阻分压器用于将电压从24V降低至3.3V,以将其馈送至MCU。下图显示了制动器电压反馈电路。
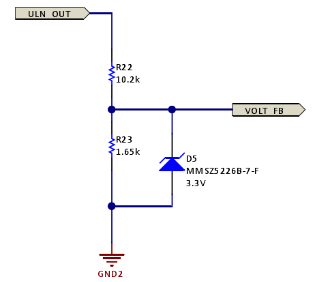
制动器电压反馈电路原理图
(7)电源
1)使用LMZ14201生成3.3V电压
LMZ14201是一个用于为初级侧供电的降压型直流/直流电源模块。此器件通常用于将较高的直流电压转换为较低的直流电压,最大输出电流为1A。本设计使用LMZ14201将24V输入电压转换为3.3V,从而为隔离器的初级侧和MCU供电。下图显示了LMZ14201的电路。
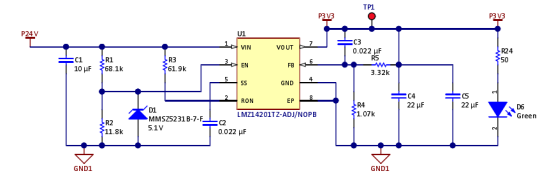
使用LMZ14201生成3.3V电压的原理图
输出电压由VO和地而之间连接的两个电阻器组成的分压器决定。分压器的中点连接至FB输入端。FB电压与0.8V内部基准进行比较。在正常运行状态下,当FB引脚上的电压降至0.8V以下时,将启动接通时间周期。主要的MOSFET接通时间周期会导致输出电压升高,并导致FB上的电压超出0.8V。只要FB上的电压高于0.8V,接通时间周期就不会出现。
稳压输出电压由外部分压电阻器R5和R4决定:
整理各项,可实现所需输出电压的两个反馈电阻器的比值为:
所选电阻器的阻值必须在1.OkS2至1 O.OkS2范围内。本参考设计使用3.32k的R5和1.07k的R4来生成3.3V的输出电压。
2)使用TPS7B6933生成3.3V电压
次级侧上的数字隔离器需要一个3.3V的电源来为其供电。因此,本设计中使用TPS7B6933将24V转换为3.3V,从而为隔离器的次级侧和高侧开关供申。下显示了TPS7B6933的申路。
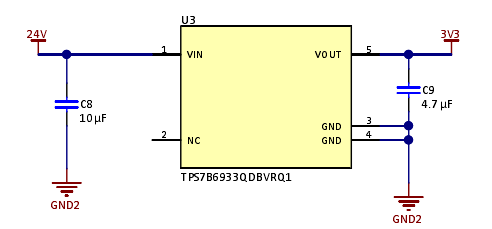
使用TPS7B6933生成3.3V电压的原理图
5PCB布局
下图是PCB的俯视图。该图中突出标示了高侧和低侧开关。
PCB的俯视图
PCB布局建议:
下图分别显示了隔离层和接地划分。初级侧和次级侧铜轨通过隔离层彼此隔离。初级侧和次级侧之间保持着4mm的铜轨间爬电距离。两个20引脚连接器J3和J4相距20mm,可连接至C2000LaunchPad。电源平而被划分为3.3V和24V平面。
接地平面分为两个平面:GND1和GND2o GND1用作IS07142的初级侧和LM 14201器件的接地。GND2用作IS07142的次级侧、TPS27S100, ULN2003A和TPS7B6933器件的接地。
-
机器人
+关注
关注
212文章
28888浏览量
209515 -
伺服驱动器
+关注
关注
22文章
496浏览量
32003 -
缓冲电路
+关注
关注
1文章
76浏览量
20341
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论