 关于MP6500/MP6600自适应电流控制方案的介绍
关于MP6500/MP6600自适应电流控制方案的介绍
步进电机的运行质量,往往很难准确的量化评估。通常,靠人的眼睛,耳朵,手来判断相对位置,噪声和振动的情况。这些方法都很难精确测量每个细分段的位置精度。一个步距角1.8°步进电机,每八分之一步对应的旋转角度为0.225°,非常小。在电机运动时,比较容易的测试方法是时域测量,定位误差会转化为速度的变化。速度随时间的变化可以用示波器测量出来。为了实现这些测量,测试设备需要一个高分辨率的光学编码器和与步进电机支架组装在一起的磁粉制动器。
步进电机选用的是一个用于小型工业设备或3D打印机的XY位移平台的典型电机:1.8°步距角NEMA 23步进电机,电感量为2.5mh,额定电流2.8A。
要进行运行质量测量,还需要一个频率电压转换器(Coco Research KAZ-723)去处理光电编码器的输出信号,转化为电压信号后就可以在示波器和频谱分析仪上分析处理。这个电压信号实时代表了不断更新的电机转速。
测试设备如下照片所示。
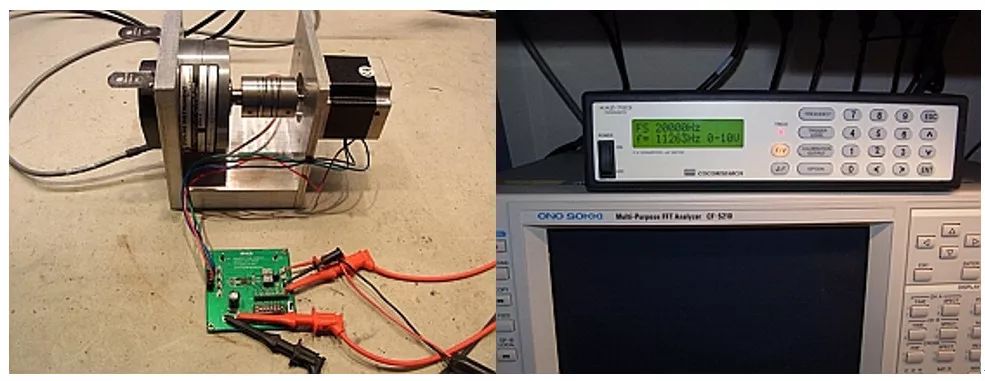
图注:电机试验台和kaz-723 频率电压转换器
为了检测整个测试系统的运行和了解所用电机和测试装置的固有缺陷,在电机两个线圈上加上相位差90度的正弦波电流。两相电流和代表电机转速的电压信号,如图6所示。
频率电压转换器的输出显示电机瞬时速度的变化是周期性的,与驱动电流波形同步。这个速度变化很可能是由于电机本身的磁场和机械构造的缺陷引起的,也部分原因可能是编码器,测试机架,或驱动电流的谐波失真分量。
那么,图6就是此测试设置下此电机最理想的运行结果,虽然我们可以通过预调整驱动波形来补偿电机结构引起的问题以进一步提高运行质量。
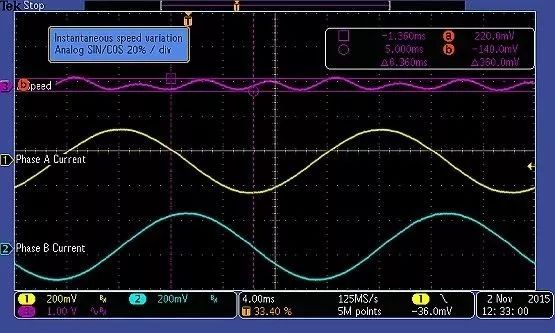
图6:模拟电流驱动电机运行测量
接着,在相同设置和试验条件下,用市面上通用的双极步进驱动器来驱动电机,采用传统的峰值电流控制和使用外部检测电阻器。该驱动器电流增大时采用慢衰减模式,电流减小采用混合衰减模式。
混合衰减模式的阈值设置尽量优化,使得慢衰模式工作时间尽可能长,同时当电流幅值减小到零时能一直保证跟踪所期望的理想波形。这样可以尽可能的减小PWM电流纹波,也就是尽量减小速度的变化量。
如图7所示,采用这种传统步进驱动芯片,速度的变化是模拟正弦和余弦波电流驱动的三倍。这意味着电机噪声,振动,以及定位误差都增加了。
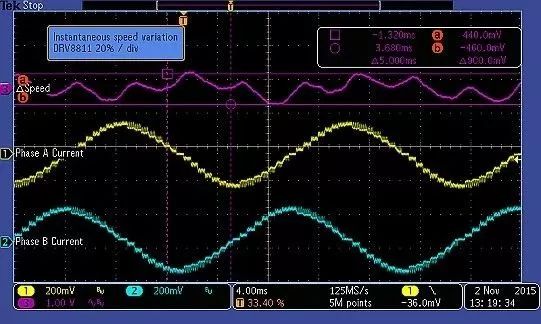
图7:传统控制调节方案下的电机运行质量
MPS公司的MP6500步进驱动集成芯片,采用内部电流采样和上述的自动衰减电流调节方案,可以实现更好的电机运行质量。如图8所示,速度变化虽不是和模拟正弦和余弦波电流驱动的结果一样小,但是比传统的驱动方案要改善许多,使得电机运行更平稳安静,定位更精确。
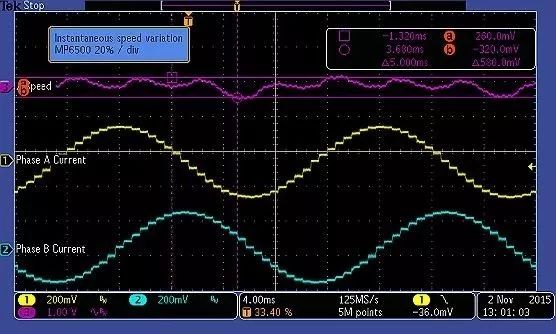
图8:MPS公司的MP6500驱动的电机运行质量
高速运行
相对于传统方案,MP6500的改进自适应电流控制模式可以使电机运行在更高的速度。
图9为,同上测试系统下采用传统电流控制模式,电机转速不断提高的测试结果(横轴为时间,纵轴为转速)。失速发生时,速度测量结果是在8V左右,相当于在480RPM。
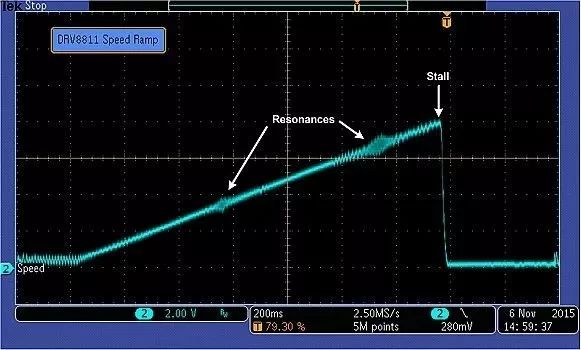
图9:传统控制模式的提速测试
使用相同的设置和绕组电流,如图10所示,由于更好的自适应电流调节控制方案,MP6500可以驱动明显更高的速度。失速发生时,速度测量结果是在10V左右,相当于在600RPM。
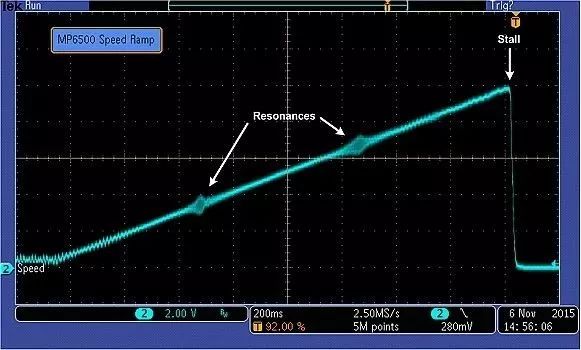
图10:MP6500的提速测试
相对于传统的步进电机的驱动芯片,MP6500采用了先进的自适应电流控制方案,在保证总系统成本不变或更低的情况下,能明显改善步进电机的运行质量。
-
芯片
+关注
关注
456文章
50892浏览量
424316 -
编码器
+关注
关注
45文章
3646浏览量
134678 -
电流控制
+关注
关注
4文章
143浏览量
23168
发布评论请先 登录
相关推荐
自适应电流焊接控制器:精准调控,高效焊接
国产PLC崛起:基于STM32MP257FAK3的工业控制方案
基于AR1335和i.MX8MP的视觉方案

强大视觉方案:i.MX8MP与AR0144的完美结合
轩展科技 相比MP1010M-VC,腾龙MP3010M-EV有哪些优势?
步进电机如何自适应控制?步进电机如何细分驱动控制?
零线感应电流怎么消除
如何在自己的固件中增加wifi自适应性相关功能,以通过wifi自适应认证测试?
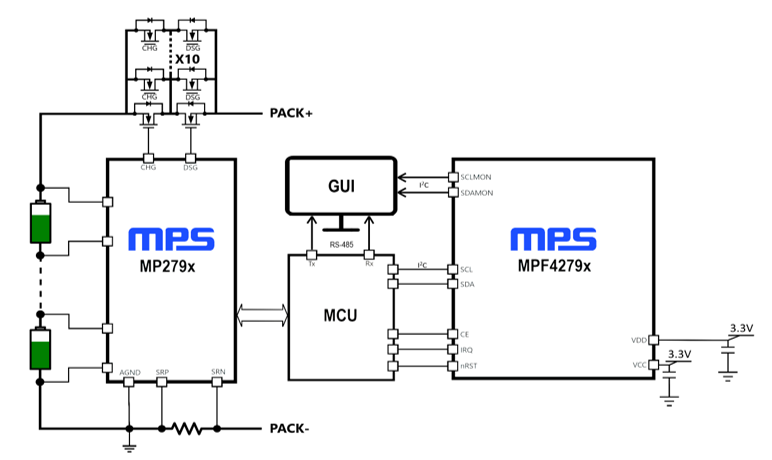
#参考设计#基于MP279x IC大电流 7 至 16 节串联电池管理系统解决方案
小米15 Pro最新曝光:左上角方形Deco,50Mp超大底主摄+50Mp
基于非线性自适应学习控制器的四轴飞行器避障方案
昂科烧录器支持MPS芯源半导体的多相控制器MP2891GQN






 工商网监
工商网监
评论