 关于USB负载的相关介绍分析
关于USB负载的相关介绍分析

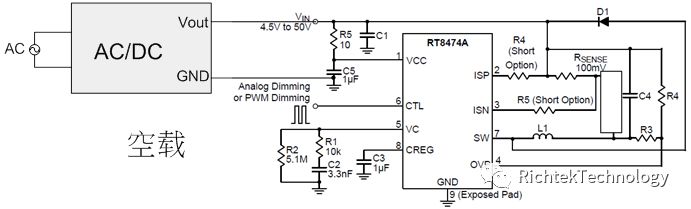
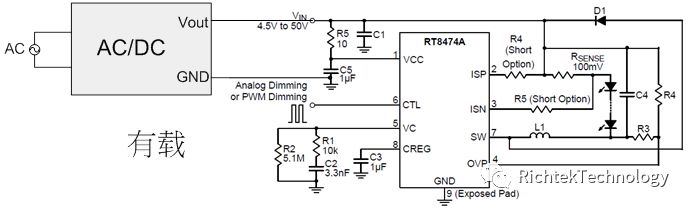
RT8474A 是输入电压范围为 4.5V-50V 的 LED 驱动器,工作频率为固定的 500kHz,集成开关管的电流限制值为 2A,支持 100% 占空比的工作状态,可用模拟信号或 PWM 信号进行输出调节,支持 Buck、Boost 和 Buck-Boost 架构的应用,在 Buck 架构下拥有特别的输出过压保护设计(可避免烧毁负载),其 Buck 应用的原理图如下图所示:

“先通电再接灯”,表示这个系统需要跨越两个状态:
这两个状态的转换,在普通的电压转换器里会被表达为“瞬态”,英文单词是 Transient,实际是负载的一个阶跃变化。这个阶跃变化会带来什么影响呢?我随意地打开了一份产品规格书,其中有这样的图片来表达此产品的性能:
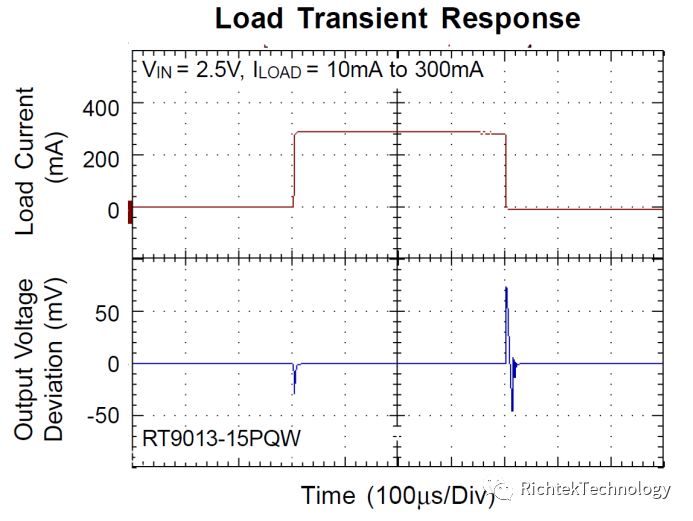
所选器件是 RT9013-15PQW,一款 1.5V 输出的线性稳压器,图中的测试是在输入电压为 2.5V 的情况下做的,测试方法是让负载电流在 10mA 和 300mA 之间跳变,观察输出电压的变化情况。由图可见,当负载电流从 10mA 改变为 300mA 时,输出电压出现了大约 30mV 的下坠,然后再回复到它原来的位置;当负载电流从 300mA 下降到 10mA 时,输出电压先是上升了 70mV,然后再迅速回到原位,可是它跑得太猛了,并不能在原位停下来,因而继续下窜到低于原位大约 48mV 的地方再开始返回,随后又经历了一段时间的小幅度振荡,最后在原位稳定下来。
为什么稳压器在负载变化的时候会有这样的响应呢?因为惯性。它们总是把自己的状态调节到能够满足负载需要的状态,可是负载要发生变化的时候并不会提前通知,它们无法在负载发生变化的同时就把状态改变到满足新的需求的状态,只能在发现输出变化以后再做出响应,这样就出现了响应的滞后现象。调节过程本身也是有惯性的,过猛了就会冲到另一个极端去。控制回路的设计总是希望响应是快速的,回复原位的过程是可控的,最好不要有振荡过程,这种过程被理解为稳定度不足的表现。线性稳压器多属于响应极快的系统,所以它们的滞后算是短的,如果是开关模式的转换器,这种滞后就多多了:
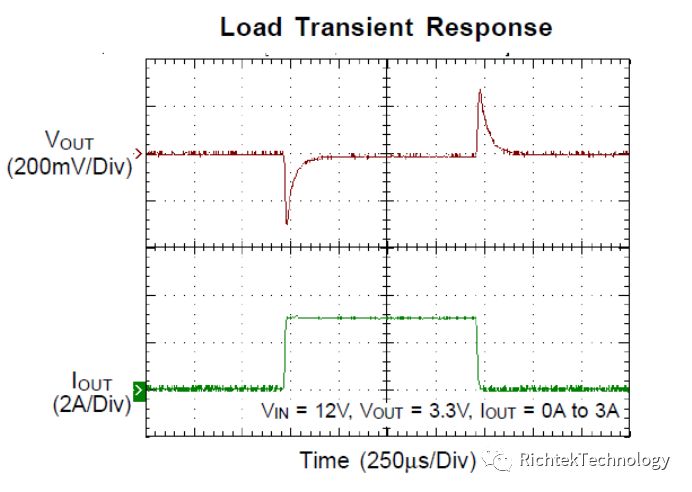
这是表现符合车规的 36V Buck 转换器 RT2875 的瞬态响应过程的波形图,你可以从中看到它和前面的线性稳压器的响应特性的区别,请注意输出电压下坠、上窜的幅度和回复原位所需要的时间。用于同步的时钟、滤波电感、输出电容都会导致响应的滞后,这是它们与线性稳压器不一样的地方。
为了改善瞬态响应的特性,科学家、工程师们可没少做努力,DC/DC 这个领域里面就有很多不同的控制架构,立锜的 ACOT(Advanced Constant On Time) 算是其中的一个成果,我们可从下图看看其效果:
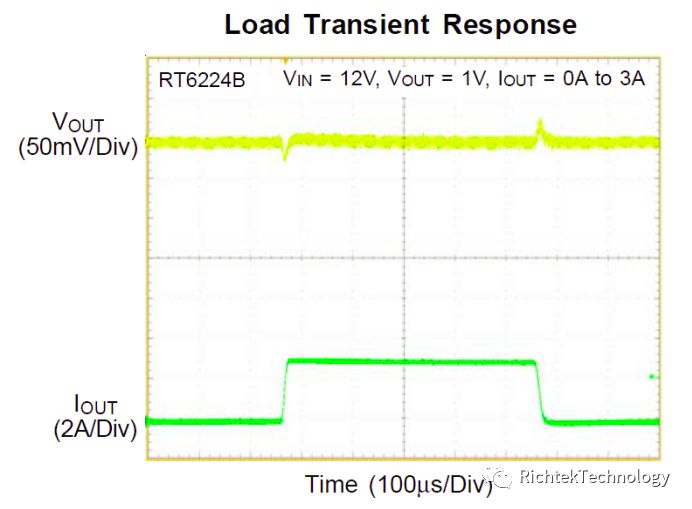
此图来自 RT6224B 的规格书,测试条件和前者相当,负载电流都是在 0A-3A 之间跳变,但是输出电压更低,仅仅为 1V。在这样低的电压下工作的器件对电压的变化会非常敏感,所以就会要求非常低的电压过冲和下坠,我相信像这个图所表达的特性是非常好的,能满足很多苛刻应用的需求。
用来表现电压转换器的瞬态响应特性的图片却很少会在用来驱动 LED 的器件规格书中出现,亲爱的读者你是否注意到了这一点呢?这又是为什么呢?
答案其实很简单,照明用的 LED 驱动器的负载在应用中是不变的。负载阶跃在普通的 LED 照明应用中根本就不存在,我们为什么要去表现它用不着的特性呢?纯属浪费而已。因此,本文开头提及的 RT8474A 的规格书中没有表现瞬态响应特性的图片就是很正常的了。
如果一颗器件的规格书不去表现它的某种特性,是否意味着它就没有某种特性呢?答案当然是否定的,你在 RT8474A 的原理图中看到的 VC 端及其外接 RC 电路就是用于它的瞬态响应特性调节的,你可以根据自己的需求对其进行调节,但在正式开始这一工作以前,你得对基本的控制理论有一些了解,然后你才能比较好地开展这一工作,这个问题相对复杂,我们就不在这里展开了。
继续思考我们开始提及的问题:“输出正极一碰负载,IC 就冒烟了。”
你可知道“一碰”这个词代表着多少意义?这取决于你对问题思考的深度。
最浅的一层认识是负载从“无”变为“有”,只有两个状态:无代表空载,有代表满载。我们小的时候看电影,最喜欢问谁是好人、谁是坏人,好在那个时候的电影把好人和坏人表现得非常直白,一看形象就知道,一听说话就知道,一看做事就知道,好人好得非常彻底,坏人坏得淋漓尽致,习惯了这种教育以后,我们在现实中看人也是一分为二,非好即坏,非坏即好,这就给我们处理人际关系带来了障碍,因为实际中的人不是这样的,每个人都是有好有坏的,全看每一个当下他是如何选择的,也看你是从什么角度去看待那一个选择的。
如果现实中的一碰就完成了接触,负载从空变满也是有个过程的,这个过程就是我们前面说的阶跃过程,它将导致一个响应过程(教科书中说的“阶跃响应”),RT8474A 的占空比将从一开始的全开状态逐渐演变为等于 Vout/Vin 的状态,其间经历的过程是怎样的,取决于 RT8474A 所处的环境,它的输入、负载的规格、所有外围元件参数都与之相关。最佳的结果大概是这样的,它的负载电流逐渐从 0 上升到预设的额定电流,没有抖动,没有折腾,实现这点还需要前端 AC/DC 的配合,确保其输出总是能够满足它的调节过程的需要,但事情常常不会这么顺利,因为 AC/DC 在遇到这样的负载变化的时候也有一个响应过程,而我们此前并不知晓它的特性是怎样的。
这样的不理想的理想结果是我们从最简单的二元分别的假设出发推导出来的,如果我们去观察事实,我们会发现实际的“一碰”根本就不是一个简单的过程,它可以复杂到可能根本无法分析下去,最后还得想办法对过程、分析进行简化,所以下面就直接简化地对事情进行描述。
当负载靠近输出正极还没有真正接触的时候,两者之间的空间电场将逐渐加强,到了某个时刻,极高的电场强度将使两者之间的空气发生电离,空气阻抗将因离子态的出现而急剧下降,在尚未真正接触的两个端子间形成实际的电流通路,负载电流急剧增加。这个过程通常能看到火花的出现,我家有个侄子小时候曾将一节干电池的两个电极用金属线短接,当时只看见火花一闪,他的指头上便留下了一道烧焦的痕迹,由此可见这一下释放的能量有多厉害。
当真正的接触实现以后,电路继续工作,负载电流继续增加,但在这时已经接触的两个端点又会再次分开,这是由于接触碰撞的反弹造成的,这种分离可能造成电流中断,断开之后又会重新续上,而且可能反复很多次,RT8474A 将会在此过程中不断变换其占空比,努力使其电流检测电阻上的电压等于额定值。
玩过单片机的朋友在学习编程的时候大概都做过开关按键消抖软件,一般的教程里都有这样的开关接触过程的波形示例:
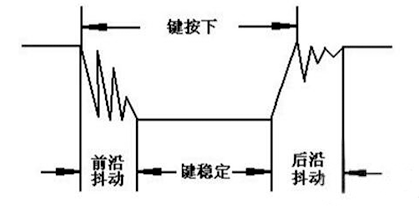
一个在设计上已经努力进行了消抖处理的按键都还要这样抖动,你用手工随意去进行两个触点的接触会带来什么样的抖动效果呢?真的是难以预估的,好思考的读者可以顺便想想为什么波形要画为锯齿形状。
对于 RT8474A 来说,负载的接入便意味着负载的增加,负载的断开便意味着负载的减小,但它并不在乎这一点,它只有一个目标:让输出电流等于设定值。坚持自己的目标,这无疑是值得称道的一种执着,可是当负载反复通通断断的时候,这种执着将给它带来灾难,因为它的占空比即使到了最大化也可能不能得到它想要的结果,最后就会在它坚持占空比最大化的时候有它不能承受的电流流过它(即使IC有过流保护也无法保证电流不会过流,因为从检测到过流到保护的实现是需要时间的),最后因为过热而烧毁了。
RT8474A 的输出电流的反复变化必然反映到它的供应电压上,前端的 AC/DC 也会进入反复无常的运作状态,其输出电压高过 RT8474A 的耐压是很容易的事情,这时候将发生什么状况呢?想进一步探讨的读者请在历史消息里去查看过去的文章:EOS 是怎么回事?
在上述的这些事情发生期间,负载的通断、RT8474A 的运作和 AC/DC 的运作既是各自独立的,又是相互影响的,要把责任推到任何单一的因素上都是不可取的,怕的就是当一个操作带来的冲击正在被修复的时候,另一个冲击又到来了,系统认为此前的修复行为过了头或是严重不足,所以它只好往另一个方向进行修复或是在原有的方向上进行更深的修复,这样就会在反复中将系统带向不可挽回的深渊。作为一个测试者,你的责任就是确保不要这样做,因为这样的测试对现实没有任何帮助,哪个用户会把灯具中的 LED 动来动去的呢?但是作为设计师却有责任将电路的响应特性调节到比较好的状态,使它能在负载有一定的变化时能够进行稳定可控的调节,我们进行瞬态响应测试的意义便是帮助这个过程的完成,有这种需求的读者可以购买立锜的 Load Transient Tool 来帮助自己完成这种测试。
写完此文的时候,我想起了当年研究 LED 在 MR16 应用中的历程。早期的各种解决方案在面对电子变压器的时候都存在各种不确定性,因此兼容性和闪烁问题总是解决不了,我们找到的 Boost + Buck 架构就是将问题分段来处理的:Boost 的存在既解决了电子变压器的稳定工作问题,又给后级的 Buck 提供了稳定的工作环境,因此一劳永逸地解决了所有问题,对此有兴趣的读者可以去研究 RT8476 和 RT8479。
-
负载
+关注
关注
2文章
681浏览量
36744 -
驱动器
+关注
关注
54文章
9125浏览量
156870 -
输入电压
+关注
关注
1文章
1387浏览量
18371
发布评论请先 登录
XRP7704 TQFN EVB相关设计文档介绍
示波器探头的负载效应介绍

开源项目USB协议分析仪总体介绍

Infineon USB0010 Dongle:高效的USB转I2C接口设备

负载开关IC数据表中相关术语和功率损耗计算方法

分析负载特性时,有哪些常见的错误或误区?
如何分析负载特性来调整报警阈值?

如何排除 USB 协议分析仪测试中的干扰源?
吉事励相关逆变器测试设备介绍
关于交流负载模式中的CF值设置(下)

关于电池负载如何模拟的三大方案




评论