 关于SPI继电器驱动控制器的现状和发展应用分析
关于SPI继电器驱动控制器的现状和发展应用分析

汽车工业对可靠性要求很高。同时,从业者也在不断致力于有效控制成本和提高效率。为了满足这些要求,汽车制造商对架构进行了标准化,并在不同的汽车平台上整合了需求。另一方面,车辆中的电子元器件迅速增加,功能和选项的数量非常广泛,因此还需要灵活性和可扩展性。
我们以其中最具代表性的车身控制模块(BCM)为例,大量继电器、指示器和执行器分布在车辆上,每一个继电器或者负载,就需要一个通道来进行控制,并且还要有全面的诊断功能。因此,需要一个产品可以高度集成这些功能和通道,SPI控制驱动器便是由此而诞生的。
以 “英飞凌SPIDER+系列TLE75602”为例,通过其内部框图(图1)直观地了解SPI控制驱动器的内部架构,它是将多通道的驱动器集成于一起,并加以SPI控制,进一步提升集成度和诊断功能。
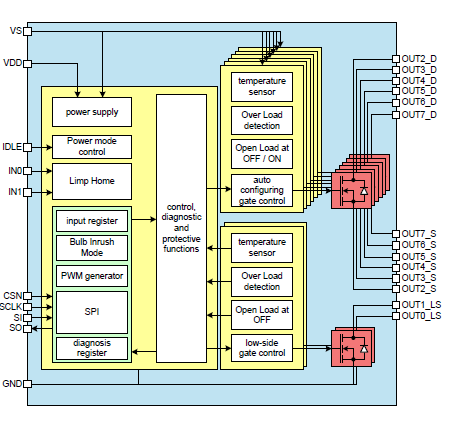
图1 内部框图
1. SPI控制驱动器的特点
SPI控制驱动器作为一个多通道设备,相比于传统的分立通道,可以减少PCB空间。与此同时,它还具有很多重要的特点,我们将着重介绍其SPI通讯,高低边灵活可配,以及对于不同负载的兼容性特点。
1.1 SPI通讯
SPI是串行外设接口(Serial Peripheral Interface)的缩写。SPI是一种高速的,全双工,同步的通信总线,其节约芯片的管脚,同时为PCB的布局上节省空间。正是出于这种简单易用的特性,如今越来越多的芯片集成了这种通信协议。
SPI同步的多从通讯协议使微控制器在I/O方面的资源会进一步地减少。
SPI总线可以分为并行控制或者菊花链控制。如图2所示:
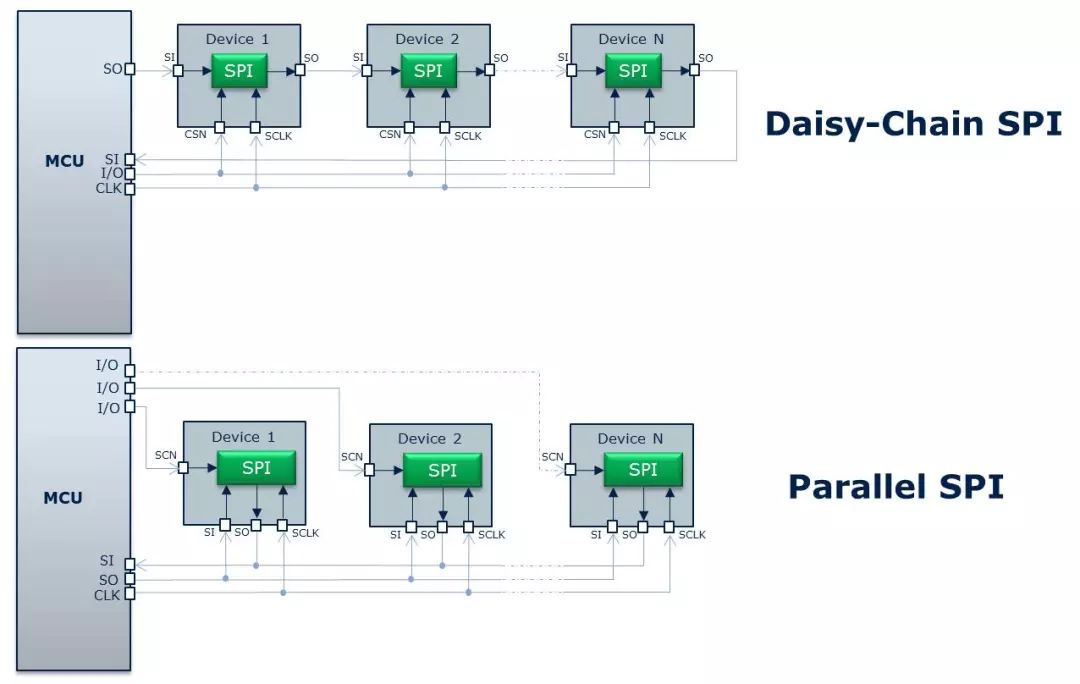
图2 SPI菊花链及并行总线结构
对于并行SPI(也称为级联SPI),除了SCLK、SI等之外,总线中的每个从机都需要微控制器(芯片选择、CSN)的一个输出,以便将消息寻址到特定的从机。在这种配置下,微控制器和SPI从机之间的通信使用标准的16位字消息。
使用菊花链配置,无论链中的“从机”数量如何,微控制器所需的管脚数量都会减少到至少4个(SO,SI、CLK和CSN)。菊花链拓扑的缺点是,SPI消息长度与链中设备的数量“n”成比例(n*16位)。例如,如果在SPI菊花链配置中控制4个spider+设备,则消息长度将为64位。而且我们还要评估扩展位长消息所带来的额外通信延迟的影响。
1.2 灵活配置的驱动电路拓扑
驱动负载的电路拓扑主要有高边驱动、低边驱动、半桥驱动和全桥驱动四种,如图3所示:
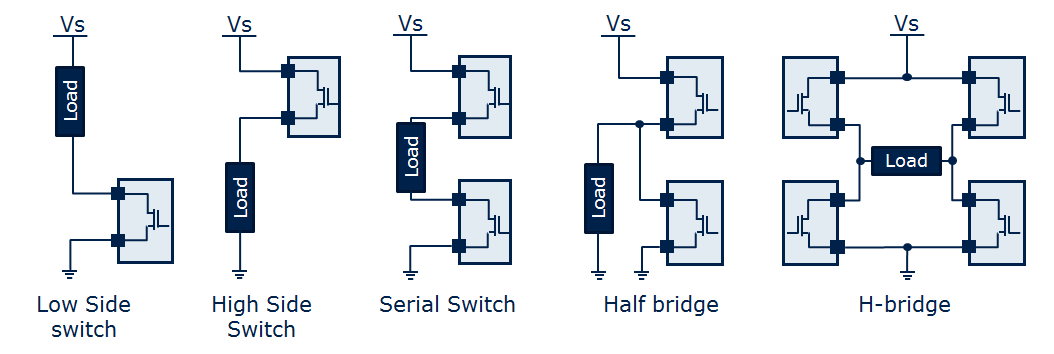
图3 负载的四种驱动拓扑
传统的低边开关将所集成的MOS管的漏极引出,用于连接负载,从而将接地(GND)连接到负载,负载始终连接到另一端的更高电位,即电池正极。当低边开关启动时,电路闭合,电流流过负载。低边开关是最容易实现和最便宜的拓扑结构,但在系统层面上有两个主要缺点,即每负载需要两根电线,一根用于开关,一根用于给负载供电;第二个缺点是,如果车辆中最常见的故障模式是对地短路,则负载会被意外激活。
传统的高边开关将所集成的MOS管的源极引出,用于连接负载,将电源或电池(VS)连接到负载,负载始终连接到另一端的较低电位,即接地(GND)。系统级的优点是减少接线,因为开关只需要一根导线,负载的另一端直接连接到底盘上的接地(GND);此外,如果输出对地短路,负载不会被意外激活。高边开关需要一个电荷泵来提供高于电池(vs)的栅极电压,以确保NMOS的栅极有足够的电压来激活开关。
SPI控制驱动器将内部集成MOSFET 的源极和漏极分别引出,大大提高了通道的灵活性,不仅可以从高侧或低侧驱动负载,还可以实现图3所示的半桥,全桥等拓扑;与此同时,可配置通道还有一个系统优势:同一设备内可以支持不同的电池或保险丝供电。
1.3 不同负载的兼容性
负载主要分为三类,分别是阻性负载,容性负载和感性负载。
电阻负载仅受电流能力和功耗的限制;SPI控制驱动器最典型的电阻负载是传感器、参考电压和指示灯。
典型的感性负载是继电器线圈;除了功率级的功耗和电流能力外,这种负载的一个关键考虑因素是负载关闭时的耗散感应能量。SPI控制驱动器集成了一个有源箝位电路,它能够重复吸收大多数汽车继电器的感应能量,而无需额外的外部保护电路(即续流二极管)。
电容性负载简单地定义为初始峰值电流或浪涌大于稳态电流的任何电子负载。在这种情况下有些半导体开关通常会因过电流保护而闭锁。以英飞凌SPI控制驱动器的SPIDER+系列为例,它还可以通过实施自动重试策略驱动小灯泡和其他电容负载。
综上所述,我们可以通过传统分离器件与SPI控制驱动器方案对比(见图4)直观地看到传统分立器件的方案和SPI控制驱动器 方案的区别,以及SPI控制驱动器在系统层面的优势。
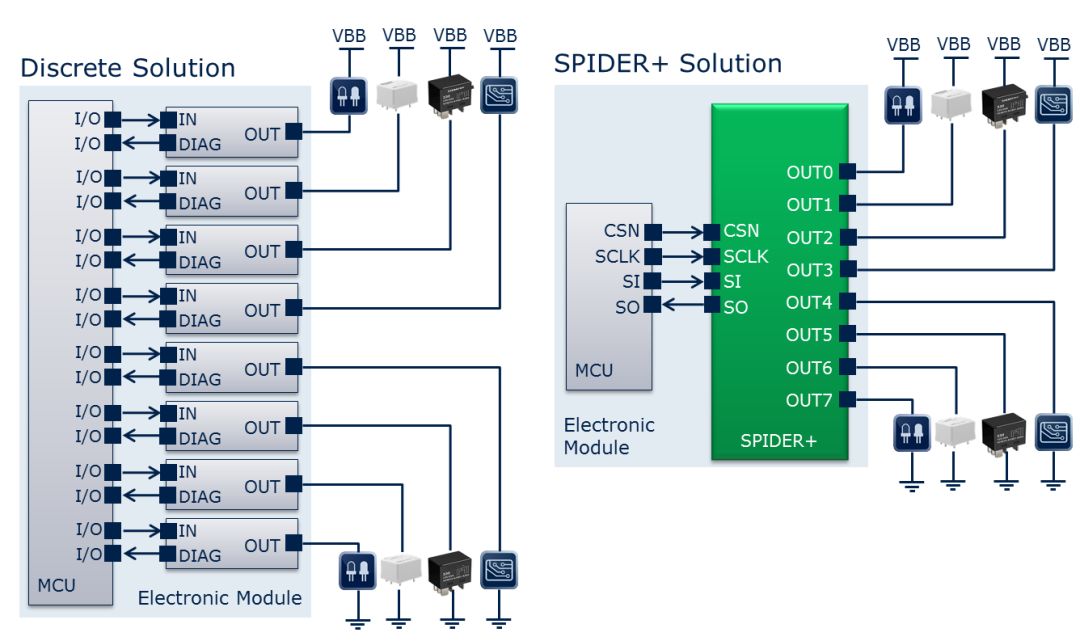
图4 传统分离器件方案对比SPI控制驱动器方案
2. SPI控制驱动器的跛行回家模式
作为一个以SPI通讯为主要控制方式的驱动器,如果微控制器和驱动器之间的SPI通信损坏,意味着发送的消息和预期的响应数据不匹配,那么必须要有一种故障安全机制,即使在电子模块发生故障的情况下,包括软件执行错误、SPI消息损坏或数字电源电压不正确等情况下,依旧可以确保车辆中的某些安全临界负载保持功能。这种故障安全机制就叫做跛行回家模式。
为了更清晰地解释跛行回家模式的实现方法,我们以英飞凌的SPI控制驱动器TLE75602和系统供电芯片TLE9263QX为例,搭建最小系统来进行解释。
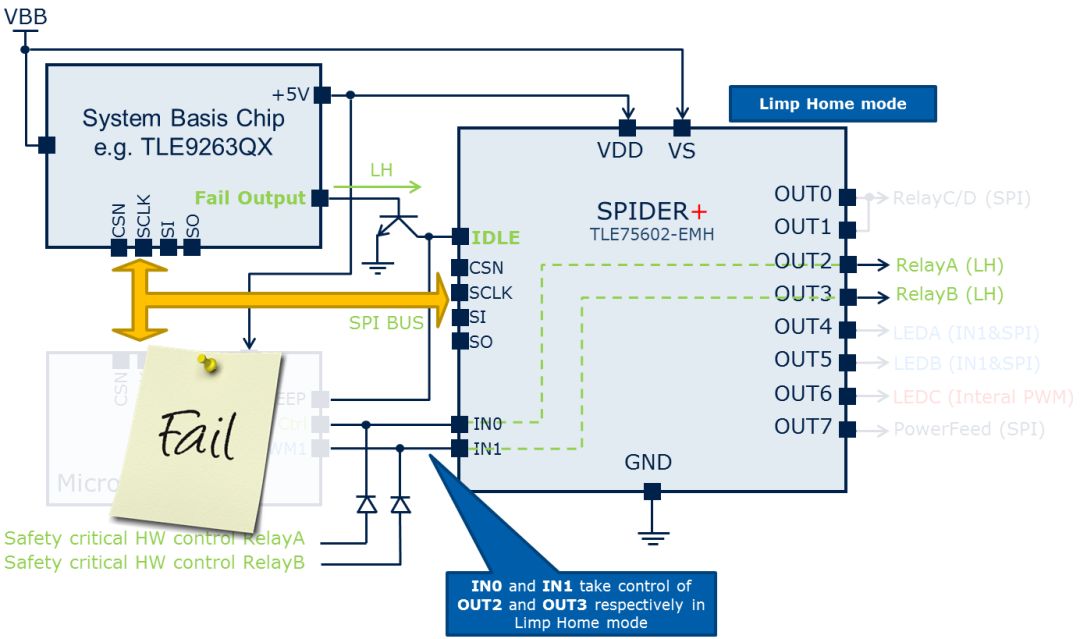
图5 跛行回家模式示例
示例中由系统供电芯片来监控微控制器、SPI通信和+5V/VDD电源的状态,如图5 所示:继电器A和继电器B被分配给out2和out3,因为在跛行回家模式期间,这些通道可以由IN0和IN1直接控制。微控制器IO 与外部安全硬件一起用作冗余路径。正常模式时,其输出由微控制器进行控制;当供电芯片检测到问题时(MCU运行故障,导致与系统供电芯片的看门狗交互失败),它将触发“故障输出”,拉低与其连接的TLE75602 IDLE 管脚,而微控制器失去功能, OUT2, 3的继电器A, B 直接由外部的安全硬件进行控制,进入安全的故障处理状态。
3. SPI继电器驱动控制器的目标应用
SPI继电器驱动控制器最常见的汽车应用是车身控制模块(BCM)领域。但是,其几乎可用于任何汽车电子控制单元或电子控制单元,例如智能PDB(配电盒)、暖风、通风与空调活门控制、智能后视镜控制、E-shift等。
希望以上介绍能够对大家初步了解SPI继电器驱动控制器有所帮助。我们还会将其重要的特点,如功能安全相关特性等,在后续的文章和视频中进一步介绍。
-
继电器
+关注
关注
133文章
5595浏览量
155499 -
控制器
+关注
关注
114文章
17907浏览量
195707 -
拓扑结构
+关注
关注
6文章
333浏览量
41309
发布评论请先 登录



评论