 关于实感技术的分析和应用介绍
关于实感技术的分析和应用介绍
当你以为实感技术只是让机器拥有更多花哨的功能,它已经开始无微不至地关注你的健康,当你以为只有背背佳才能帮你矫正坐姿,已有神器远远超越它的地位。且看英特尔实感技术如何化身大白,帮你拥有完美身形。
实感技术无疑是今年CES舞台上的闪耀明星。科叔在CES主题演讲中骑着的Segway平衡车就装有全新的英特尔实感ZR300摄像头,拥有“视觉”的它不仅可以成为你的代步工具,还能变成机器人为你端茶倒水,或与其他智能产品互动。此外,同期登台的Yuneec无人机Typhoon H也同样搭载英特尔实感技术,从而获得实时跟随主人,记录主人运动中飒爽英姿的能力。
实感技术能让设备具有人类一样的感知能力。据英特尔实感技术相关负责人Achntya Bhowmik透露,目前英特尔一方面是缩小实感摄像头的尺寸,让其能适用于手机、手表等随身智能设备,另一方面则是打造一系列软件库,让实感技术可以做更多事情,比如手势识别、脸部识别、背景移除、3D扫描+打印、机器人人物识别以及无人机避障、增强现实应用、虚拟装饰掩饰等应用场景延伸。
随着实感技术的普及与广泛应用,游戏体验将更加真实,机器人将更能知冷知热,手机、电脑将更加炫酷而又实用。除此之外,还有更多让人意想不到的日常生活应用!
科再奇在CES上展示了Ninebot公司的Segway个人平衡车,它可以变成一个机器人
无论是学生还是普通上班族,我们坐在桌前的时间越来越多,而其中对着电脑的时间更是占了一大部分,而正确的坐姿往往并不舒服和自由,久而久之不良坐姿则会对我们的肩颈腰椎造成巨大伤害。除了背背佳,你天天面对的电脑可是提醒你保持正确坐姿的最佳监督者,其中的秘密就是CES大热的实感技术。奥妙就在文中揭晓。
本文首先介绍英特尔实感设备的组成结构以及该设备是如何获得现实场景下的三维数据。针对本课题,利用英特尔实感技术官方SDK提取出用户面部大约70个特征点的三维数据。这些特征点的三维数据就是本文坐姿检测算法的基础。在获得用户面部70多个点的三维数据之后,计算出用户此时头部的转动及俯仰角度,头部与计算机显示屏之间的距离,并投入使用;支持向量机(SVM)行训练和识别实验,实现了对“歪头”、“驼背”、“仰视过大”、“俯视过大”、“距离屏幕过近”等不良坐姿的判定,并经过多次实验验证。通过与MySQL数据库的结合,将坐姿特征、每日不同坐姿的时间长度记录下来,进行数据分析,生成报表给到用户,从而达到完整的检测、提醒、矫正目的。
实时坐姿 检测算法 硬 件及开发环境
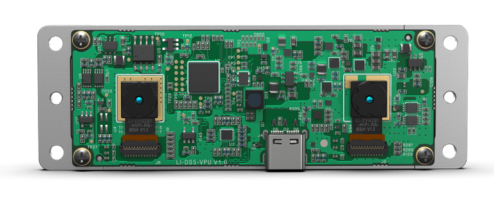
实感技术是英特尔推出的深度摄像头,最新一代设备是全VGA分辨率(640 x 480 60fps)的深度摄像头,另外具有1080p分辨率的RGB摄像头,在拍摄1080p画面的时候传输速率为30fps,检测范围在0.2米至1.2米之间,根据不同的使用场景和算法,检测距离也不一样。目前已有多款笔记本电脑配置实感摄像头,本文采用的是开发版本的实感摄像头,为开发人员而设,如下图所示。
开发款摄像头
开发款的基本尺寸是150mm x 30mm x 58mm,根据官方介绍开发需要的环境配置如下:
具备USB 3.0接口,根据实际测试,台式机最好使用后置USB3.0接口,保证足够稳定的供电
官方建议使用第四代以及之后的酷睿系列CPU
在本次开发过程中使用的是第三代Core i5 CPU
需要注意的是,目前英特尔实感技术SDK仅支持Windows 8.1以及之后的Windows操作系统,而且是64位,暂不支持Mac OS 以及Linux。
坐 姿检测系统设计
整套坐姿检测系统的设计流程如下图所示。
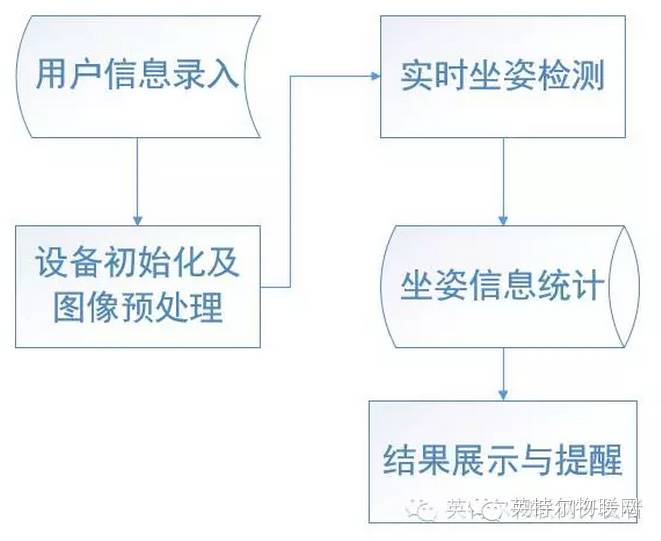
坐姿检测系统流程图
坐姿检测系统一共分为五个主要部分,分别是用户信息的录入,设备初始化以及图像预处理,紧接着就是最核心的实时坐姿检测,进而将坐姿信息进行统计,并在适当的时候进行结果展示与提醒。其中实时坐姿检测模块是本文的重点研究方向,设计流程如下图所示。
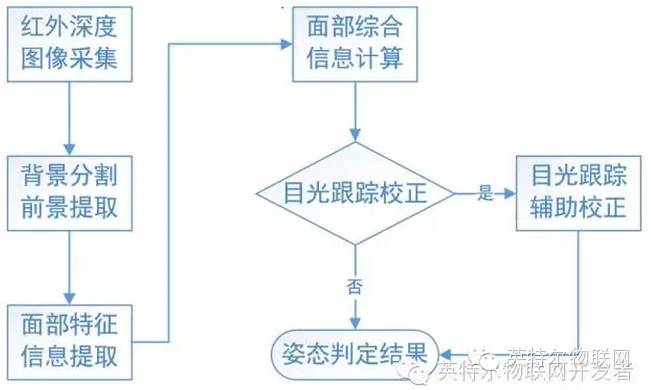
实时坐姿检测模块流程图
在实时坐姿检测中,如果开启目光跟踪技术,则利用目光跟踪技术进行校正,进行辅助判断,以增强系统的稳定性和准确性。
算 法判定
用户的头部运动以及头部状态是主要的特征提取空间,通过实感技术在三维坐标中,对头部的仰角(PITCH,绕X轴旋转)、偏航角(YAW,绕Y轴旋转)、翻滚角(ROLL,绕Z轴旋转)、高度信息、空间位置信息进行坐标变换提取,将转换过的数据进行卡尔曼滤波,获得较为准确的数据进行坐姿比对,并且头部信息各项参数满足一定指标,则判定该用户的坐姿是端正的,如下图所示。
用户坐标系
当欧拉角的翻滚角ROLL的绝对值大于10度的时候,可以认为用户左右歪头幅度过大,是错误的坐姿,需要进行提醒。准确来说,当ROLL值为正10度以上的时候,用户头部向右倾斜角度过大,当值为负10度以上的时候,用户头部向左倾斜角度过大;当欧拉角的YAW的绝对值大于18度的时候,可以认为用户头部的左右转头扭头的幅度过大。这样的错误坐姿经常出现在程序员群体中,因为很多程序员都是用两台显示器或多台显示器,由于桌子不够大,用户与显示器之间距离过近,在观看显示器的时候需要大幅度的扭头,对颈肩部造成额外负担,属于不良坐姿。当YAW值大于正18度的时候,用户头部向右旋转幅度过大,当YAW值小于负18度的时候,用户头部向左旋转的幅度过大;当欧拉角的PITCH值加5之后的绝对值大于25度,则可以判定用户的头部俯仰程度过大,属于不正确坐姿。通常情况下,用户在使用电脑的时候显示器都会略低于用户的头部高度,而最适宜的坐姿也不是头部一定要平视显示器,而是稍微低一点点头,这样有助于减轻肩部脊椎的压力,适合长时间工作。更准确地说,当欧拉角的PITCH值大于20度,用户是仰起头在看显示器画面,出现这种情况的典型错误坐姿就是手托下巴抬头看显示器,如下图所示,在阅读长段文字或者浏览视频内容的时候经常会出现这样的坐姿,而当欧拉角的PITCH值小于负30度的时候,用户低头幅度过大,可以判定用户坐姿不正确,这种情况下对脊柱的损伤较为严重,出现这种不良坐姿的多为佩戴眼镜的用户。
手托下巴的错误坐姿
另外一种典型的错误坐姿就是距离显示器过近,通过实感技术的深度信息,可以快速获得用户的头部、肩部相对于摄像头的距离,并且可以精确获得用户的眼睛距离摄像头的距离信息,因此可以快速判断用户是否距离显示器过近。本文实验的显示器尺寸是17寸,用户与显示器的最佳距离在70厘米至80厘米,小于70厘米的时候距离显示器过近,通常这样的情况都是因为驼背造成的,而反过来,不但会对视力造成严重损伤,也会加重驼背的情况。正确坐姿如下图所示。
正确坐姿
实 验结果分析
实验组数为4组,每组一名同学,共四人,实验结果数据如下:
第一组,实验天数5天

第二组,实验天数5天

第三组,实验天数5天

第四组,实验天数5天

通过对不同实验对象的测试数据进行分析,可以发现,算法的准确率在90%以上,相比于传统的智能硬件识别方法的40%,准确率有了大幅提升。但是在实验中也发现,第二组的检测准确率较低,通过对测试同学的身高、视力等信息进行了解,还发现另外一个重要因素,用户平时使用的桌子大小、座椅高低对用户的坐姿会造成很大影响,一套合适的座椅书桌也是非常有必要的。
E nding来啦~
本文设计了一种利用英特尔实感摄像头完成的实时坐姿检测算法,适用人群为需要长时间坐在电脑前工作的白领或者程序员群体,综合分析用户头部、眼部的数据,准确判断用户当前坐姿是否端正,相比于传统的智能硬件解决方案,省去了单独佩戴智能硬件设备的繁琐,并且极大提高了检测准确度,达到了90%以上,同时极低的误警率也保证了在实际应用场景中不会干扰到用户的正常工作。在算法和整体系统软件的设计上,仍有一定的优化改进空间,在对图像信息进行处理之前,可以采用更好的图像降噪算法,用户面部特征数据在处理的时候可以进行滤波处理,以减少采集数据误差及跳变对检测造成的影响。
-
显示器
+关注
关注
21文章
4981浏览量
140088 -
图像处理
+关注
关注
27文章
1293浏览量
56781 -
实感技术
+关注
关注
0文章
8浏览量
7813
发布评论请先 登录
相关推荐
相位噪声分析仪的技术原理和应用
电视信号分析仪的技术原理和应用
数字通信分析仪的技术原理和应用
射频分析仪的技术原理和应用场景
导航分析仪的技术原理和应用场景
参数分析仪的技术原理和应用场景
英特尔推出全新实感深度相机模组D421
立体视觉新手必看:英特尔® 实感™ D421深度相机模组





 工商网监
工商网监
评论