 人工智能汽车的前车检测介绍
人工智能汽车的前车检测介绍
近年来,基于智能化的一体化安全技术得到了迅猛的发展,主要包括了高级驾驶员辅助系统(Advanced Driver Assistant System,简称ADAS)、自动/半自动驾驶,这些系统致力于弥补驾驶员的不足,改善驾驶员的辨识能力,正确地操控汽车。其中,ADAS系统的功能覆盖了车辆周围360°的范围,能够进行车道偏离检测、前车检测、行人检测、交通标识识别等,并能在必要的时候对驾驶行为进行策略性引导或直接进行干预,以辅助驾驶员驾驶。
根据相关的研究数据可知,当驾驶员行驶车辆处于危险状况时,若能有类似预警系统及时提醒驾驶员可以减少30%的追尾事故、50%的路面相关事故以及60%的迎面相撞事故。车辆防碰撞预警系统能够精确地测量出所驾驶车辆与前方行驶车辆之间的距离,并通过计算得出前后两车的车速,再经过一系列相关计算和分析,当发现所驾驶车辆有潜在的危险时,就能及时向驾驶员报警并提示其立即进行适当的操作,从而避免事故的发生。
前车检测是车辆防碰撞预警系统的关键技术之一。基于视觉的前车检测一般可以分为基于特征、基于光流场、基于模型和基于机器学习4种。
前车检测方法:1、基于特征的前车检测方法2、基于光流法的前车检测方法3、基于模型的前车检测方法4、基于机器学习的前车检测方法
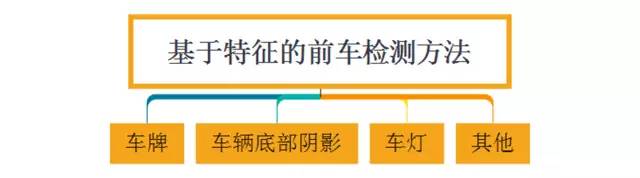
基于特征的前车检测方法主要是根据车辆的对称性、阴影、边缘等特征进行车辆检测,为得到确切结果,通常将阴影、对称性和边缘特征结合起来。目前,基于特征的前车检测方法主要有基于车牌、车辆底部阴影、车灯等特征的前方车辆检测方法。
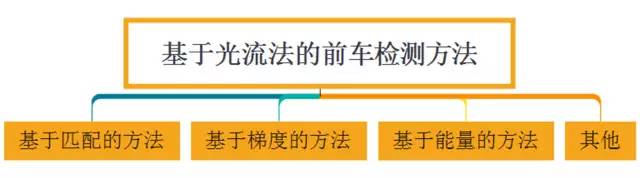
基于光流法的前车检测方法主要通过摄像机运动、前方障碍物运动或二者相对运动的瞬时速度场实现,但该方法对噪声、光线变化敏感,计算量大。目前,光流场的计算一般分为:基于匹配的方法、基于梯度的方法和基于能量的方法等。
在运动的某一特定时刻,首先计算图像上二维速度场(视频图像帧中的灰度变化的一阶和二阶导数),此时三维运动目标的速度矢量就投影成图像表面的二维瞬时速度场,然后把二维图像中运动目标的点投影到真实三维目标的点上后,运动目标的运动参数(运动目标的运动状态)和运动目标的位置就可以从得到的二维速度场中利用一些约束条件推测出来。
基于模型的前车检测方法首先建立已知车辆精准的二维或三维模型,然后与待检测图像进行匹配,该方法对车辆模型过分依赖。
基于机器学习的前车检测方法主要利用从数据中提取的规则或模式将数据转化为信息,对数据进行分类识别。常用的机器学习方法有支持向量机(Support Vector Machine,简称SVM)、BP神经网络、Adaboost级联分类器等。基于机器学习的前车检测方法检测准确率较高,但运算量较大。
智芯原动采用了基于特征和机器学习结合的前车检测方法该方法主要包括以下步骤:① 采用具有深度学习的卷积神经网络,对选取的样本图像进行训练,以得到车辆识别网络模型;② 检测车道线来确定检测车辆的搜索范围;③ 根据选取的特征,在车辆的搜索范围内初步定位车辆的候选区域;④ 根据车辆识别网络模型对候选区域进行识别并输出结果。
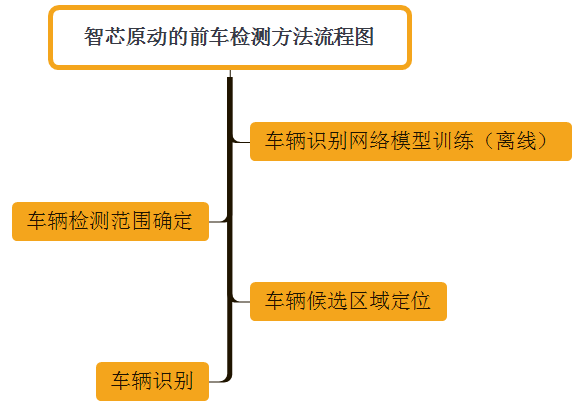
上图给出了智芯原动的前车检测方法流程图。其中,具有深度学习的深度网络是采用卷积深度神经网络。
智芯原动的前车检测功能模块是持续监控前方车辆,通过两车之间的距离和相对速度计算出即将发生碰撞的时间,可以在发生碰撞危险前2.7秒发出警报,提醒驾驶员及时刹车制动,避免与前方车辆发生追尾碰撞。下图给出了智芯原动的前车检测结果图。
-
人工智能
+关注
关注
1791文章
47157浏览量
238138 -
智能车
+关注
关注
21文章
403浏览量
76949 -
自动检测技术
+关注
关注
1文章
10浏览量
8039 -
智芯原动
+关注
关注
0文章
10浏览量
67
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论