 机器人坦克制作图解
机器人坦克制作图解
第1步:材料清单
Raspberry Pi
摄像机
电机控制器
PWM控制器
2x18650电池
机箱
平移和倾斜支架
免责声明。提到的清单没有完成。有许多小东西,如电线,螺丝,丙烯酸板。
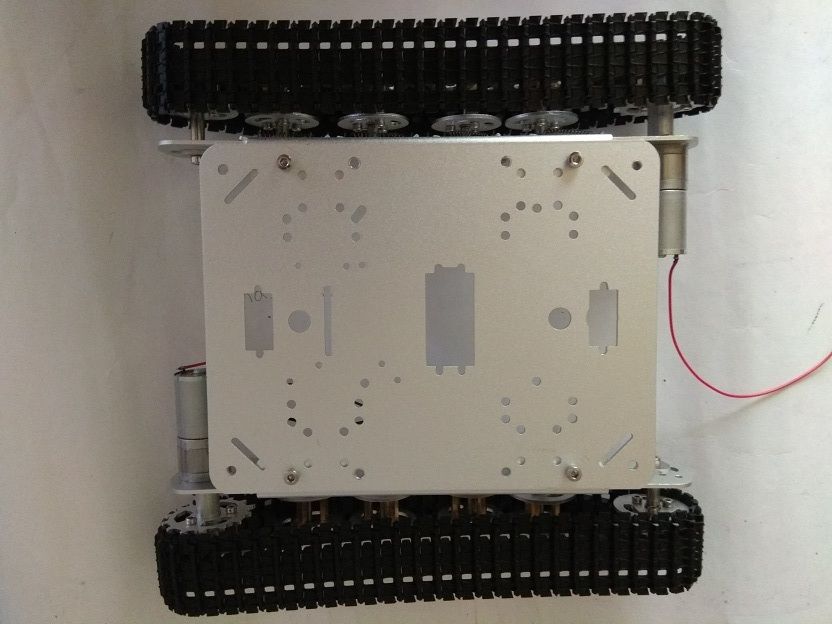
第2步:建造油箱底盘
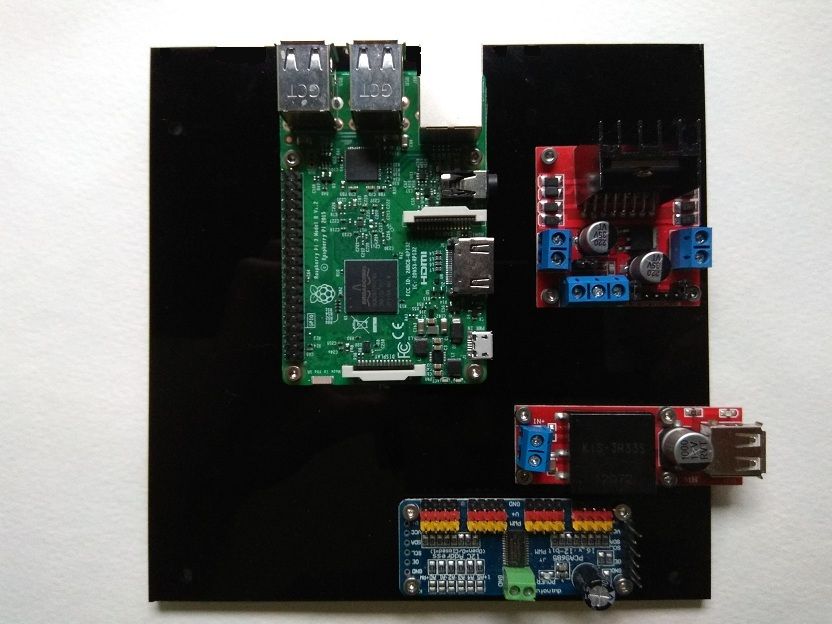
步骤3:将电气连接到印版
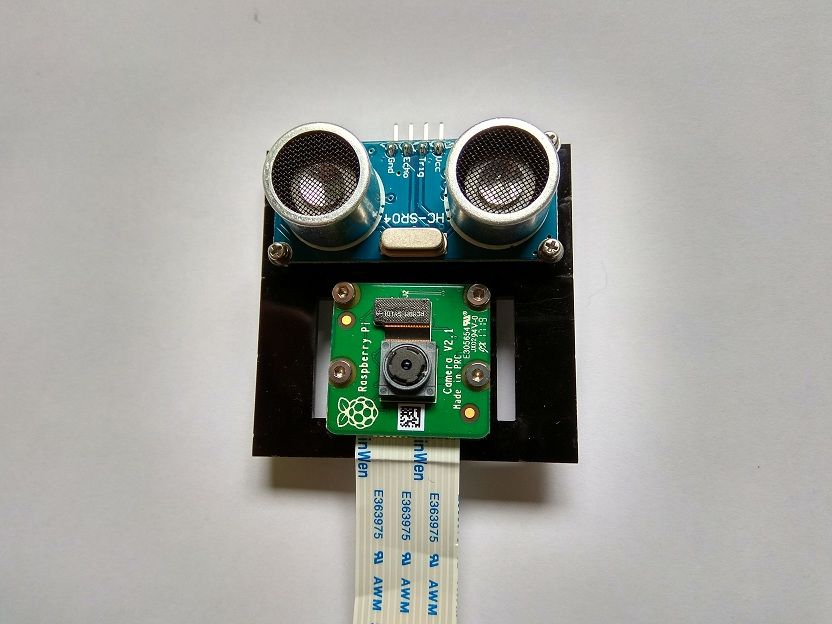
步骤4:将摄像机和测距仪连接到电路板
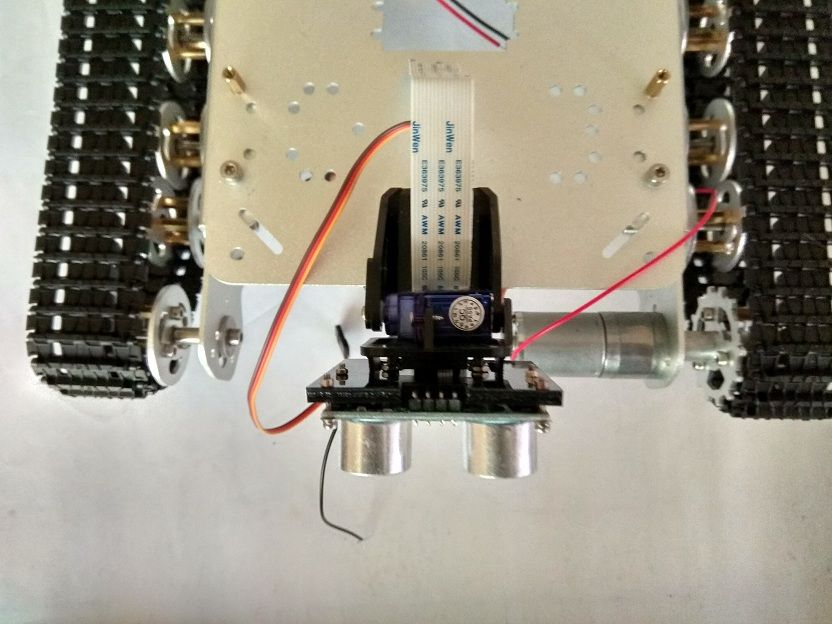
步骤5:将相机板连接到支架并连接到机箱
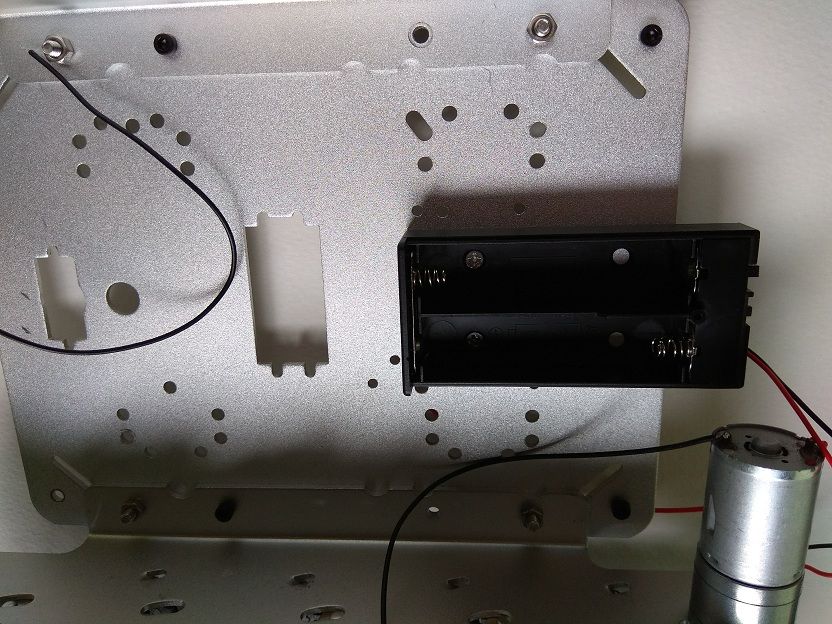
步骤6:连接电池座到机箱
步骤7:将电路板连接到机箱并连接所有东西

步骤8:安装软件
安装Raspbian Jessie
安装OpenCV
安装MJPG-Streamer
从GitHub获取控制服务代码
As AI使用的例子有:
- 来自OpenCV的Haar级联的猫探测器
- 具有OpenCV-DNN的物体探测器
Ť他的REST界面是:
GET/ping
GET/version
GET/name
GET/dist
POST/fwd/on
POST/fwd/off
POST/back/on
POST/back/off
POST/left/on
POST/left/off
POST/right/on
POST/right/off
POST/photo/make
GET/photo/:phid
GET/photo/list
POST/cam/up
POST/cam/down
POST/cam/right
POST/cam/left
POST/detect/haar/:phid
POST/detect/dnn/:phid
POST/classify/tf/:phid
步骤9:设置连接
为Raspberry Pi设置Wi-Fi连接有一种无头方式。
将带有Raspbian的microSD卡插入计算机。
创建一个文本文件wpa_supplicant。 conf with content:
ctrl_interface = DIR =/var/run/wpa_supplicant GROUP = netdev
update_config = 1 country = US
network = {ssid =“your-wifi-network”psk =“your-wifi-password”key_mgmt = WPA-PSK}
还建议创建一个名为“ssh”的空文件。它将允许远程访问RPI(不要忘记更改默认密码)。
步骤10:获取Android应用程序
从Google Play安装Android应用程序
-
机器人
+关注
关注
211文章
28423浏览量
207126 -
树莓派
+关注
关注
116文章
1707浏览量
105652
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
医疗机器人有哪些_医疗机器人有哪些应用
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人

柔性机器人与刚性机器人区别与联系

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
Al大模型机器人
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
工业4.0中的机器人向协作机器人演进
「喜报」迈步机器人荣获机器人应用典型案例奖






 工商网监
工商网监
评论