 鼠标机器人的制作
鼠标机器人的制作
步骤1:零件
*一只老鼠
* 2 ---(1.5-5v)直流电机。
* 2 ---车轮
* 2 --- 1.5v AA电池(可以使用任何电池或更高的电压来加速电机)
*某些连接线(实心线)
* 1 ----摇臂开关
* 2 ----微动开关带杠杆(SPDT-单刀双掷)
*喇叭(我用的那个黄色塑料)只要它能够按下开关
*一些胶棒来安装喇叭,任何人都会这样做。
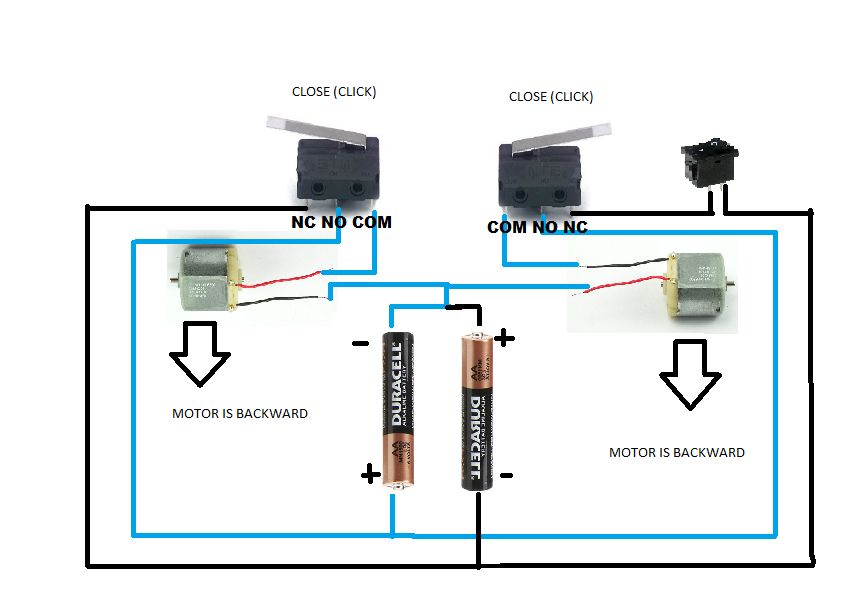
第2步:示意图
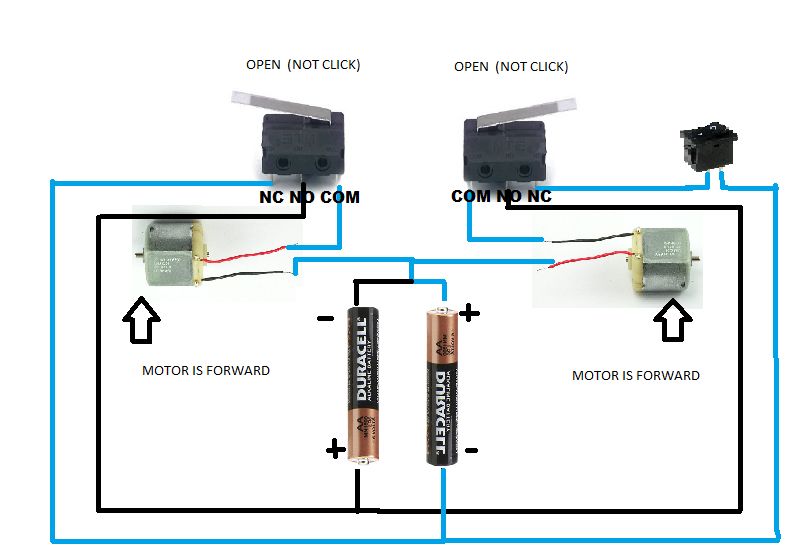
在Open switch条件下(不是点击) - 只要NC(常闭)连接,鼠标机器人将向前转。
在关闭开关条件下(单击) - NO(常开)将短路并在相反方向形成闭环,因此鼠标机器人将转向向后。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28205浏览量
206525 -
鼠标
+关注
关注
6文章
588浏览量
39725
发布评论请先 登录
相关推荐
医疗机器人有哪些_医疗机器人有哪些应用
医疗机器人是医用机器人工程的重要应用,结合了各个学科最新研究和发展的成果,并广泛应用于医学诊疗、康复等医学领域。医疗机器人的类型多种多样,以下是主要的一些类型:
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50

柔性机器人与刚性机器人区别与联系
柔性机器人和刚性机器人在结构、功能、应用场景等方面存在显著的区别,但也有一些联系。以下是它们的主要区别与联系: 区别 1.结构材料 柔性机器人:由柔性材料(如硅胶、弹性体、智能材料等)制成,能够弯曲

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
本帖最后由 Tronlong创龙科技 于 2024-7-19 17:18 编辑
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它
发表于 07-09 11:38
Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
基于FPGA EtherCAT的六自由度机器人视觉伺服控制设计
概述
中国制造 2025 是中国政府实施制造强国战略的第一个十年行动纲领,是全面提升中国制造业发展质量和水平的重大战略部署,其中明确指出了围绕工业机器人创新技术的重要地位。目前工业机器人
发表于 05-29 16:17
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
随着懒人经济的崛起,智能家居设备的需求呈现出显著的增长态势。作为智能家居领域的一员,扫地机器人因其方便、实用的特性而备受消费者青睐。特别是在无刷电机技术的加持下,扫地机器人不仅提升了清洁效率,还优化
发表于 05-05 15:03
工业4.0中的机器人向协作机器人演进
工业机器人出现在工业3.0的黎明,沿着计算机控制和自动化,并经过多年的发展,成为各种行业和过程的专业化。机器人是为大规模生产而设计的;它们通常是孤独的,在相对孤立的情况下完成特定的任务。随着工业
「喜报」迈步机器人荣获机器人应用典型案例奖
日前,在中国科学院深圳先进技术研究院的指导下,由深圳市机器人协会、《机器人与智能系统》杂志组织的第八届深圳机器人年度评选揭晓榜单。迈步机器人凭借着基于柔性驱动器的外骨骼

LabVIEW的六轴工业机器人运动控制系统
LabVIEW开发六轴工业机器人运动控制系统
本项目开发了一个高效的工业机器人控制系统,重点关注于运动学算法和轨迹规划算法的实现和测试。LabVIEW作为一个关键技术,在项目中扮演了核心角色
发表于 12-21 20:03
工业机器人产业发展及应用现状
机器人(Robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。根据制造目的的不同, 机器人可分为工业
发表于 12-21 16:07
•1421次阅读

ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ROS系统是什么
ROS(Robot Operating System)是一个适用于机器人的开源的元操作系统。它提供了操作系统应有的服务,包括硬件抽象,底层设备控制,常用函数的实现,进程间消息传递
发表于 11-30 16:01





 工商网监
工商网监
评论