 怎样用PWM控制步进电机
怎样用PWM控制步进电机
步骤1:接线和连接
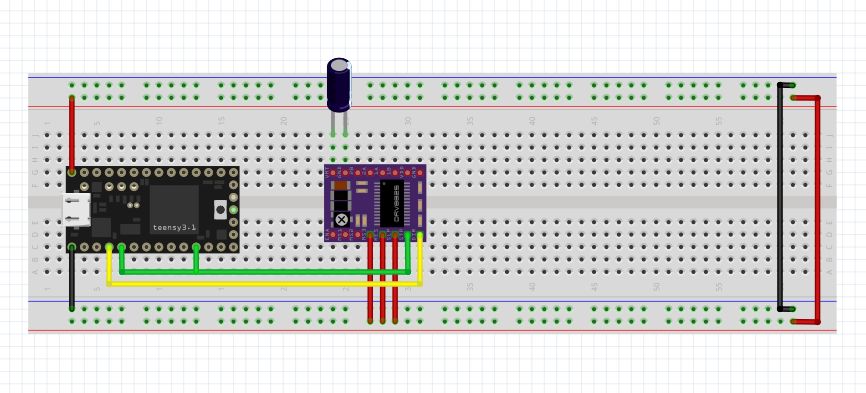
首先将焊头连接到DRV8825板和Teensy,然后将它们放在面包板上。 (实际上最容易焊接这些标题,而电路板已 在面包板上,但按您喜欢的顺序工作!)
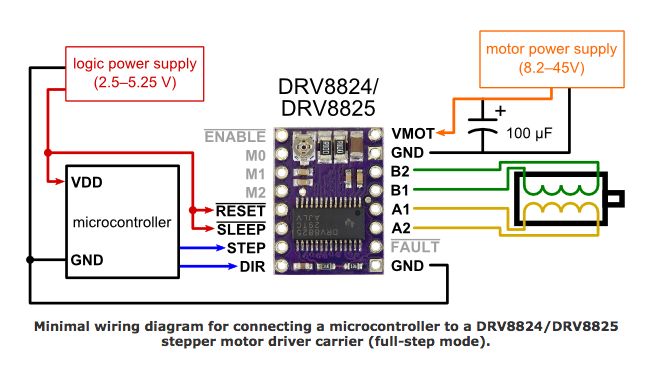
我们将连接步进驱动器,就像Pololu产品页面中的图表一样(也包含在下图中)。
VMOT 和 GND 之间将有一个100uF电容,并连接到能够提供至少2A的12V台式电源。
将 ~RESET 和 ~SLEEP 引脚连接到teensy的5V电压轨保持高电平。
步进器本身将连接到 A1,A2,B1 和 B2。
将步进器设置为1/16步通过将 M2 拉高并允许 M0 和 M1 浮动来实现模式。
驱动程序的 GND 引脚将连接到teensy GND。
teensy的引脚2将连接到驱动程序的 DIR 引脚。
并且teensy的引脚3将连接到驱动程序的 STEP 引脚。
teensy将有一个额外的连接:引脚9将是连接到引脚3.这将允许teensy通过引脚更改中断计数脉冲。
还要确保将DRV8825的限流电阻设置为适当的值,如产品页面所述。
第2步:编码!
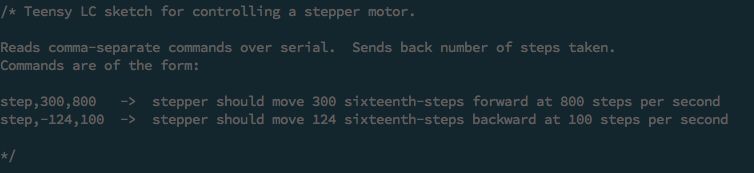
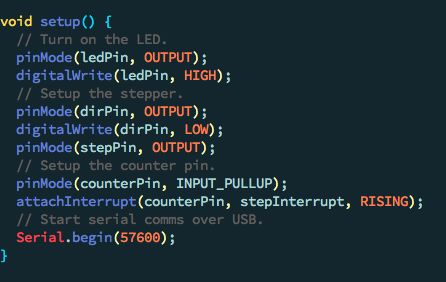

我用teensyduino写了一个类似arduino的草图来控制步进电机。按照此处的teensyduino设置步骤正确设置编码环境。
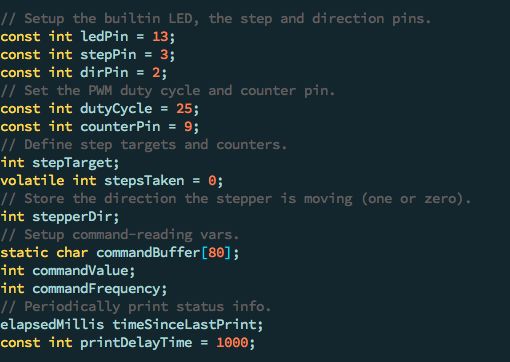
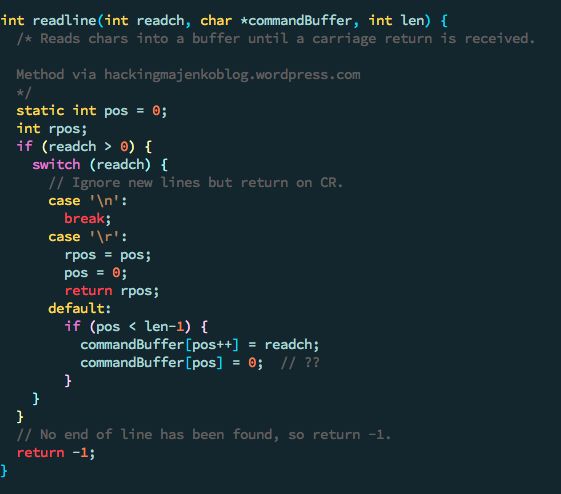
该代码允许我们从终端发送命令来控制步进器的位置。完整的草图发布在这里。下面的每张图片都会细分代码的一部分。还有一个控制器正在运行的快速演示!
第3步:接下来是什么。.
接下来可以尝试的一些事情:
添加限位开关以控制步进器行程的最大和最小范围
使用加速实验以快速加速步进
尝试不同的微步进值 - DRV8825支持完整步长至1/32微步
-
PWM
+关注
关注
114文章
5190浏览量
214038 -
步进电机
+关注
关注
150文章
3112浏览量
147522
发布评论请先 登录
相关推荐







 工商网监
工商网监
评论