 如何制作一个Android控制的机器人
如何制作一个Android控制的机器人
第1步:需要的东西
1.arduino nano
什么是Arduino?
Arduino是一个基于易用硬件和软件的开源电子平台。 Arduino板能够读取输入 - 传感器上的灯光,按钮上的手指或Twitter消息 - 并将其转换为输出 - 激活电机,打开LED,在线发布内容。您可以通过向板上的微控制器发送一组指令来告诉您的电路板该做什么。
Arduino编程语言(基于连线)和Arduino软件(IDE),基于Processing。
多年来,Arduino一直是成千上万项目的大脑,从日常用品到复杂的科学仪器。全世界的制造商社区 - 学生,业余爱好者,艺术家,程序员和专业人士 - 聚集在这个开源平台周围,他们的贡献增加了大量可访问的知识,这对新手和专家都很有帮助。
Arduino出生于Ivrea交互设计研究所,作为快速原型制作的简易工具,面向没有电子和编程背景的学生。一旦它到达更广泛的社区,Arduino板就开始改变以适应新的需求和挑战,将其产品从简单的8位板转变为IOT应用,可穿戴设备,3D打印和嵌入式环境的产品。所有Arduino板都是完全开源的,使用户能够独立构建它们并最终使它们适应其特定需求。该软件也是开源的,并且通过全球用户的贡献而不断增长。
Atmega328
Atmel基于8位AVR RISC的微控制器结合了32 KB ISP闪存和读写能力,1 KB EEPROM,2 KB SRAM,23通用I/O线,32个通用工作寄存器,3个带比较模式的灵活定时器/计数器,内部和外部中断,串行可编程USART,面向字节的2线串行接口,SPI串行端口,6通道10位A/D转换器(采用TQFP和QFN/MLF封装的8通道),带内部振荡器的可编程看门狗定时器和5种软件可选择的省电模式。器件工作电压
在1.8-5.5伏之间。该设备的吞吐量接近每MIPS 1 MIPS。
2.bluetooth模块
HC-05模块是一款易于使用的蓝牙SPP(Serial Port
Protocol)模块,设计用于透明无线串行连接设置。
串口蓝牙模块是完全合格的蓝牙V2.0 + EDR(增强型数据速率)3Mbps调制,具有完整的2.4GHz无线电收发器和基带。它采用CSR Bluecore 04-External单芯片蓝牙系统,采用CMOS技术和AFH(自适应跳频功能)。它的占地面积小至12.7mmx27mm。希望它能简化您的整体设计/开发周期。
硬件特性
典型的-80dBm灵敏度
射频发射功率高达+ 4dBm
低功耗1.8V工作,1.8至3.6VI/O
PIO控制
具有可编程波特率的UART接口
带集成天线
带边缘连接器
软件功能
默认波特率:38400,数据位:8,停止位:1,奇偶校验:无奇偶校验,数据控制:有。
支持的波特率:9600,19200,38400,57600,115200,230400,460800。
鉴于PIO0中的脉冲上升,设备将断开连接。
状态指令端口PIO1:低断开,高连接;
PIO10和PIO11可以分别连接到红色和蓝色LED。当主机和从机
配对时,红色和蓝色LED在间隔中闪烁1次/2秒,而仅断开连接时蓝色LED闪烁2次/秒。
默认情况下,自动连接到最后一个设备。
允许配对设备默认连接。
自动配对PINCODE:默认为“0000”
由于超出连接范围而在断开连接后30分钟内自动重新连接。
3.bo带轮子的电机
齿轮电机通常用于商业应用中,其中一件设备需要能够施加大量的力才能移动非常重的物体。这些类型的设备的示例包括起重机或升降机杰克。
如果您曾经见过一台起重机,您已经看到了齿轮电机工作原理的一个很好的例子。您可能已经注意到,起重机可用于提升和移动非常重的物体。大多数起重机中使用的电动机是一种齿轮电动机,它使用减速的基本原理来增加扭矩或力。
起重机中使用的齿轮电机通常是特殊类型,它使用非常低的旋转输出速度来产生令人难以置信的扭矩。然而,起重机中使用的齿轮电动机的原理与示例电时钟中使用的原理完全相同。通过一系列大齿轮减小转子的输出速度,直到最终齿轮的旋转RPM速度非常低。低转速有助于产生大量的力,可用于提升和移动重物。
4.l298电机驱动器
L298是一个集成的单片电路采用15引脚的Multiwatt和PowerSO20封装。它是一款高电压,大电流双全桥驱动器,设计用于接受标准TTL逻辑电平并驱动感性负载,如继电器,螺线管,直流和步进电机。提供两个使能输入,以独立于输入信号启用或禁用器件。每个桥的下晶体管的发射极连接在一起,相应的外部端子可用于连接外部传感电阻。提供额外的电源输入,以便逻辑以较低的电压工作。
主要特性
运行供电电压高达46V
低饱和电压
总直流电流高达4A
逻辑“0”输入电压高达1.5 V(高噪声抗扰度)
过温保护
5.18650 * 2电池
稳定的直流电源对于电子系统的正常工作是必不可少的。所需的直流电源由两节18650锂离子2500mah电池获得。但微控制器需要5v才能正常工作。..。..所以我们增加了一个5v稳压器。这是lm7805使用的。
6.acrylic sheet
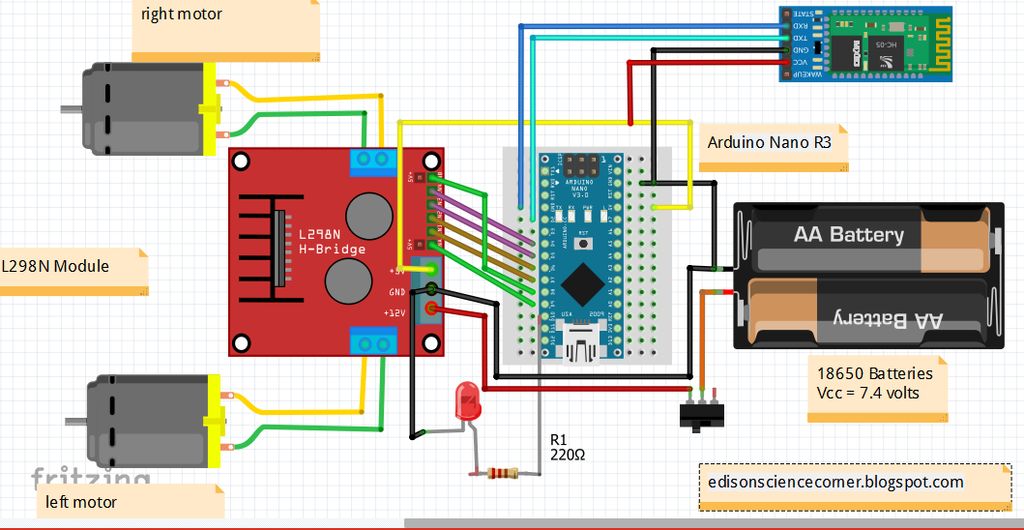
第2步:电路图

步骤3:Pcb
点板焊接
步骤4:追逐制作
我用丙烯酸来追逐
第5步:应用
REMOTEXY
RemoteXY是制作和使用移动图形用户界面的简便方法,可通过智能手机或平板电脑控制控制器板。该系统包括:
·控制器板的移动图形界面编辑器,位于站点remotexy.com
·移动应用程序RemoteXY,允许连接到控制器并通过控制它图形界面。下载应用程序。
·特色功能:
接口结构存储在控制器中。连接后,无法与服务器交互以下载界面。接口结构从控制器下载到移动应用程序。
一个移动应用程序可以管理您的所有设备。设备数量不受限制。
·控制器与移动设备之间的连接使用:
蓝牙;
WiFi客户端和接入点;
以太网的IP或URL;
互联网从任何地方通过云服务器。
·源代码生成器支持下一个控制器:
Arduino UNO,Arduino MEGA,Arduino Leonardo,Arduino Pro Mini,Arduino Nano,Arduino MICRO;
WeMos D1,WeMos D1 R2,WeMos D1 mini;
NodeMCU V2,NodeMCU V3;
TheAirBoard;
ChipKIT UNO32,ChipKIT uC32,ChipKIT Max32;
·支持的通信模块:
蓝牙HC-05,HC -06或兼容;
WiFi ESP8266;
Ethernet Shield W5100;
·支持的IDE:
Arduino IDE;
FLProg IDE;
MPIDE;
·支持的移动操作系统:
·RemoteXY是制作独特图形界面来控制微控制器设备的简便方法例如,通过移动应用程序,Arduino。
·RemoteXY允许:
·开发任何图形管理界面,使用控件,显示和装饰元素的任意组合。您可以为任何任务开发图形
接口,使用在线编辑器将元素放在屏幕上。在线编辑器发布在remotexy.com网站上。
·在开发图形界面后,您将获得实现界面的微控制器的源代码。源代码提供了程序与控件和显示之间交互的结构。因此,您可以轻松地将控制系统集成到您正在开发设备的任务中。
·使用带有图形界面的智能手机或平板电脑管理微控制器设备。用于管理用过的移动应用程序RemoteXY。
在定义的引脚开始时将用于控制电机。此外 - 引脚分为两个阵列,分别是左和右电机。通过驱动芯片L298N控制每个电机需要使用三个信号:两个离散的,电机的旋转方向,一个模拟,确定转速。计算这个引脚我们已经参与了功能轮。该功能的输入传递一个引脚阵列选择电机的指针,旋转速度为-100到100的有符号值。如果速度值为0,则电机关闭。
在预定的功能设置中,配置的是输出引脚。对于模拟信号使用的引脚,可以作为PWM转换器使用。这个引脚9和10,它们不需要在IDE Arduino中配置。
在程序调用处理程序RemoteXY库的每次迭代中的预定函数循环中。此外还有LED控制,然后控制电机。对于电机控制,从RemoteXY的字段结构中读取操纵杆坐标X和Y.根据坐标是运算来计算每个电机的速度,并调用功能轮,设置电机的速度。这些计算在程序的每个循环中执行,确保基于操纵杆坐标的电机连续控制计算引脚。
从PLAYSTORE下载REMOTEXY
步骤6 :PROGRAM
PROGRAM AND CIRCUIT
第7步:最终查看
HAPPY MAKING
第8步:
-
机器人
+关注
关注
211文章
28479浏览量
207423 -
Android
+关注
关注
12文章
3938浏览量
127524 -
Arduino
+关注
关注
188文章
6471浏览量
187293
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论