 微机电系统陀螺仪工作原理
微机电系统陀螺仪工作原理

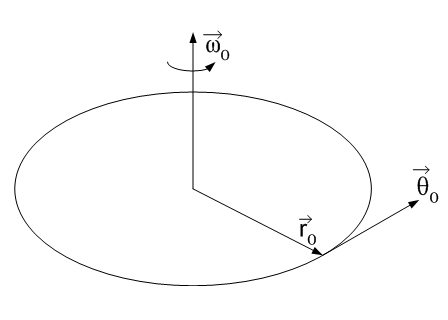
MEMS陀螺仪采用的是依赖于相互正交的震动和转动引起的交变科里奥利力。
MEMS陀螺仪利用coriolis,将旋转物体的角速度转换成与角速度成正比直流电压信号,其核心部件通过掺杂技术、光刻技术、腐蚀技术、LIGA技术、封装技术等批量生产的。
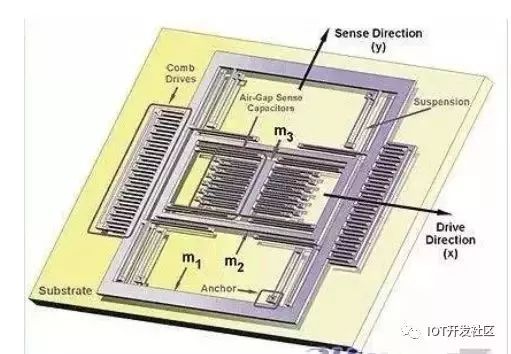
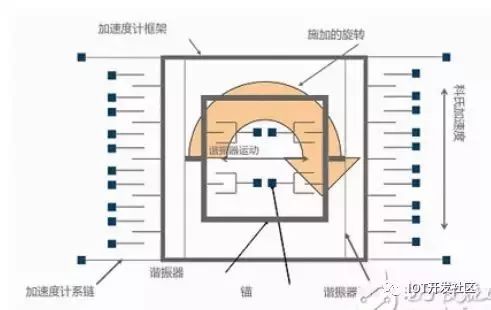
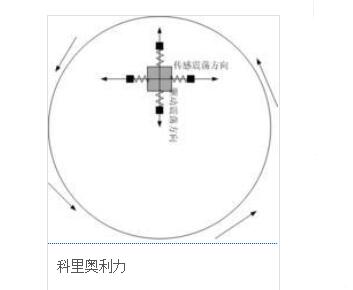
陀螺仪的内部原理是这样的:对固定指施加电压,并交替改变电压,让一个质量块做振荡式来回运动,当旋转时,会产生科里奥利加速度,此时就可以对其进行测量;这有点类似于加速度计,解码方法大致相同,都会用到放大器。
角速率由科氏加速度测量结果决定
科氏加速度 = 2 × (w × 质量块速度)
w是施加的角速率(w = 2 πf)
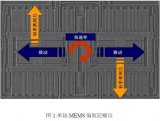
通过14 kHz共振结构施加的速度(周期性运动)快速耦合到加速度计框架
科氏加速度与谐振器具有相同的频率和相位,因此可以抵消低速外部振动
该机械系统的结构与加速度计相似(微加工多晶硅)
信号调理(电压转换偏移)采用与加速度计类似的技术
施加变化的电压来回移动器件,此时器件只有水平运动没有垂直运动。如果施加旋转,可以看到器件会上下移动,外部指将感知该运动,从而就能拾取到与旋转相关的信号。
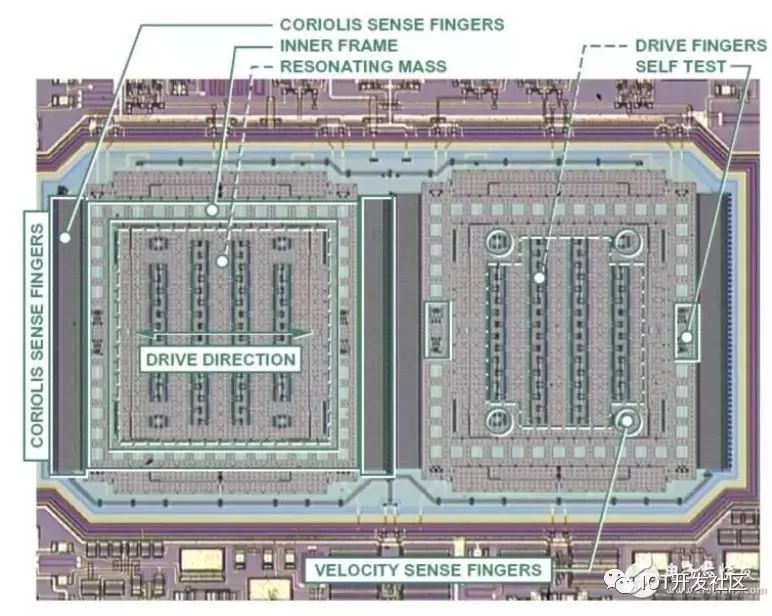
真实的陀螺仪内部构造
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
mems
+关注
关注
129文章
4534浏览量
199648 -
陀螺仪
+关注
关注
44文章
899浏览量
102132
原文标题:陀螺仪传感器工作原理深度解析
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
mems陀螺仪的特点和工作原理解析
MEMS陀螺仪也称电子式陀螺仪,就是一块芯片。 Iphone 4上的陀螺仪就是这种,主要作用是在GPS没有信号时,通过陀螺仪的作用仍然能够继续精确导航。MEMS
发表于 10-23 10:57
陀螺仪的工作原理及创新应用
`先来看一段视频,俄罗斯教授演示陀螺仪稳定器的工作原理: ●陀螺仪的名字由来陀螺仪名字的来源具有悠久的历史。据考证,1850年法国的物理学家莱昂·傅科(J.Foucault)为了研究
发表于 09-09 08:48
陀螺仪的基本组成及工作原理
(是指力矩马达、信号传感器等)。 陀螺仪的工作原理 陀螺仪侦测的是角速度。其工作原理基于科里奥利力的原理:当一个物体在坐标系中直线移动时,假设坐标系做一个旋转,那么在旋转的过程中,
发表于 12-17 16:31
陀螺仪工作原理以及不同种类陀螺仪之间的差异
文件第四步 编译并下载,观察实验现象【思考题】1、选择题2、简答题【实验目的】熟悉陀螺仪工作原理,了解不同种类陀螺仪之间的差异;熟悉MPU6050的输出形式,熟悉MPU6050的通信方法;掌握S...
发表于 08-06 06:08

MEMS陀螺仪可否取代光纤陀螺仪技术
光纤陀螺仪(FOG)以前曾经是环形激光陀螺仪(RLG)等其他技术的低成本替代品,现在该技术面临着新的竞争。微机电系统(MEMS)陀螺仪开始抢
发表于 02-24 17:24
•1.1w次阅读

MEMS陀螺仪的驱动和传感及工作原理解析
但是MEMS陀螺仪(gyroscope)的工作原理不是这样的,因为要用微机械技术在硅片衬底上加工出一个可转动的结构可不是一件容易的事。MEMS陀螺仪利用科里奥利力——旋转物体在有径向运
发表于 03-08 14:47
•7727次阅读
光纤陀螺仪与旋转式陀螺仪的工作原理解析
光纤陀螺仪(FOGs)与常用于玩具中的旋转式陀螺仪类似,因为这两种陀螺仪都能测量物体的旋转。但这两种陀螺仪的工作机制却不同:光纤
发表于 10-10 15:22
•9700次阅读
微机械陀螺仪工作原理_微机械陀螺仪的应用
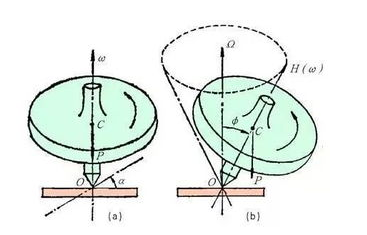
微机械陀螺仪(MEMS gyroscope)的工作原理 传统的陀螺仪主要是利用角动量守恒原理,因此它主要是一个不停转动的物体,它的转轴指向不随承载它的支架的旋转而变化。但是
陀螺仪是什么?陀螺仪工作原理
因为ST选用了音叉方法设计陀螺仪,其差分特性使系统本身对作用在传感器上的无用线性加速度和杂乱振动的敏感度低于市场上现有的其它类型陀螺仪。当这些无用的信号被施加到陀螺仪,两个质点就会沿相
发表于 10-08 16:49
•9271次阅读
陀螺仪传感器工作原理
陀螺仪传感器是一种广泛应用于航空、航天、导航和自动化控制系统中的重要传感器。它的主要作用是测量并感知物体的角速度。本文将详细介绍陀螺仪传感器的工作原理。



评论