 机器人伺服系统的特点、功用
机器人伺服系统的特点、功用
随着工业自动化的发展,越来越多的领域开始使用工业机器人代替人力。对于机器人制造商和机器人消费者而言,选择合适的伺服电机始终是一项艰难的任务。机器人的关节驱动离不开伺服系统,伺服控制系统则是实现机器人机械本体控制和伺服机构控制的重要部分。因而要了解机器人的运作过程,必然绕不过伺服系统。
伺服系统
伺服系统是以变频技术为基础发展起来的产品,是一种以机械位置或角度作为控制对象的自动控制系统。伺服系统除了可以进行速度与转矩控制外,还可以进行精确、快速、稳定的位置控制。
广义的伺服系统是精确地跟踪或复现某个给定过程的控制系统,也可称作随动系统。
狹义伺服系统又称位置随动系统,其被控制量(输出量)是负载机械空间位置的线位移或角位移,当位置给定量(输入量)作任意变化时,系统的主要任务是使输出量快速而准确地复现给定量的变化。
伺服系统的结构组成
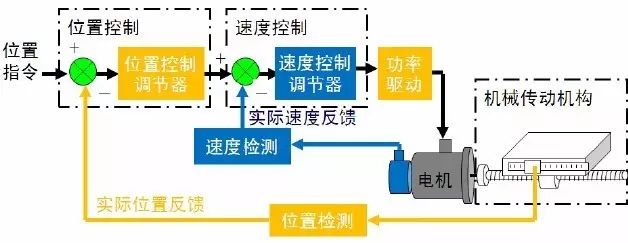
机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。

伺服系统组成原理框图
1、比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
2、控制器
控制器通常是计算机或PID(比例、积分和微分)控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3、执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4、被控对象
被控对象指被控制的物件,例如一个机械手 臂,或是一个机械工作平台。
5、检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统的特点和功用
伺服系统与一般机床的进给系统有本质上差别,它能根据指令信号精确地控制执行部件的运动速度与位置。伺服系统是数控装置和机床的联系环节,是数控系统的重要组成,具有以下特点:
必须具备高精度的传感器,能准确地给出输出量的电信号。
功率放大器以及控制系统都必须是可逆的。
足够大的调速范围及足够强的低速带载性能。
快速的响应能力和较强的抗干扰能力。
伺服系统的类型
按控制原理分:有开环、闭环和半闭环三种形式
按被控制量性质分:有位移、速度、力和力矩等伺服系统形式
按驱动方式分:有电气、液压和气压等伺服驱动形式
按执行元件分:有步进电机伺服、直流电机伺服和交流电机伺服形式
-
机器人
+关注
关注
211文章
28445浏览量
207202 -
伺服系统
+关注
关注
14文章
573浏览量
39222
原文标题:机器人身上的伺服系统
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
基于DSP的机器人视觉伺服系统设计
基于图像的机器人视觉伺服系统该怎么设计?
机器人视觉伺服系统的标定
PLC的工业机器人关节直流伺服系统
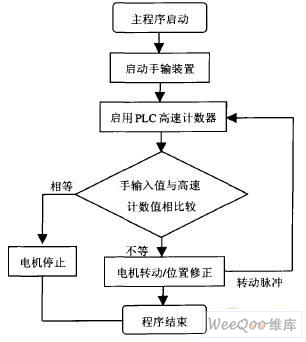
基于PLC的机器人伺服控制系统

工业机器人专用伺服系统市场概况

PLC的工业机器人关节直流伺服系统

一文了解机器人伺服系统







 工商网监
工商网监
评论