 如何制作模块化可变形FPV赛车四轴飞行器
如何制作模块化可变形FPV赛车四轴飞行器
第1步:打印3帧作品!
第一步是获得我设计的3个框架,这将允许您创建无人机。
我已将所有STL文件包含在Instructable的末尾。
主要的中央板适用于任何带有200mm x 200mm打印床的打印机,但我还设计了一个带可拆卸臂的版本,可以打印在一个只有80mm x 80mm的非常小的打印床上!
请注意,“顶板”有两个版本:一个带倾斜区域,用于安装GoPro和标准平顶板。
你有3个选项来获取框架:
自己打印,打印速度非常快
通过3DHubs打印它们,你应该3件约5美元
用你选择的坚固材料激光切割它们(铝?丙烯酸?碳?)
现在, 3D打印部件,这里是我对细丝和填充物的建议:
使用强力细丝,如PETG或ABS,这将具有一点灵活性,这意味着在一次撞击,它会弯曲而不是破碎,我在PETG中打印出来。
PLA也会起作用,它甚至会有一个优势:框架非常坚硬,因此处理电机的推力会更有效率!但是,如果发生崩溃,它更有可能中断。
填充:
至于填充密度,你会想要一架不会轻易破坏的无人机,所以最好使用更高的填充(50%)或者更多)所以它会更强。..。..它会稍微重一点,但我们将使用的电机在提升它时不会有任何问题。我所做的是以65%的填充物打印3件。您可以做更多,如90%的最大强度,如果您使用PLA我建议至少80%填充。
作为细丝的提醒,以下是关于PLA,ABS和PETG的提示:
- PLA:更容易打印长丝。主要优点是它易于打印并且非常坚硬,因此框架将更硬并且不会随着马达的推力而弯曲。然而,当碰撞时它会比ABS或PETG更容易破裂。
- ABS :ABS的优势在于它比PLA更强大,它也更灵活,所以它不会像PLA一样容易破坏崩溃。但是打印起来比较困难,并不是每个人都能打印ABS。
- PETG:作为ABS的替代品,PETG比PLA强,并且也有一点灵活,这意味着您的框架不会轻易破裂。它也非常容易打印,并且无毒。
查看我在PETG中打印的框架制作的酷刑测试视频!正如你所看到的,它是非常强大的:)
还有像POM这样的新型长丝看起来更强,但需要高印刷温度。
第2步:按照自己喜欢的方式组装框架!

现在,有趣的部分! :)
所需硬件:
- M3螺栓
- M3支架或3D打印支架(我已包含STL)文件)
现在是时候组装你的赛车无人机了!
您可以先选择形状:X或+ Shape。
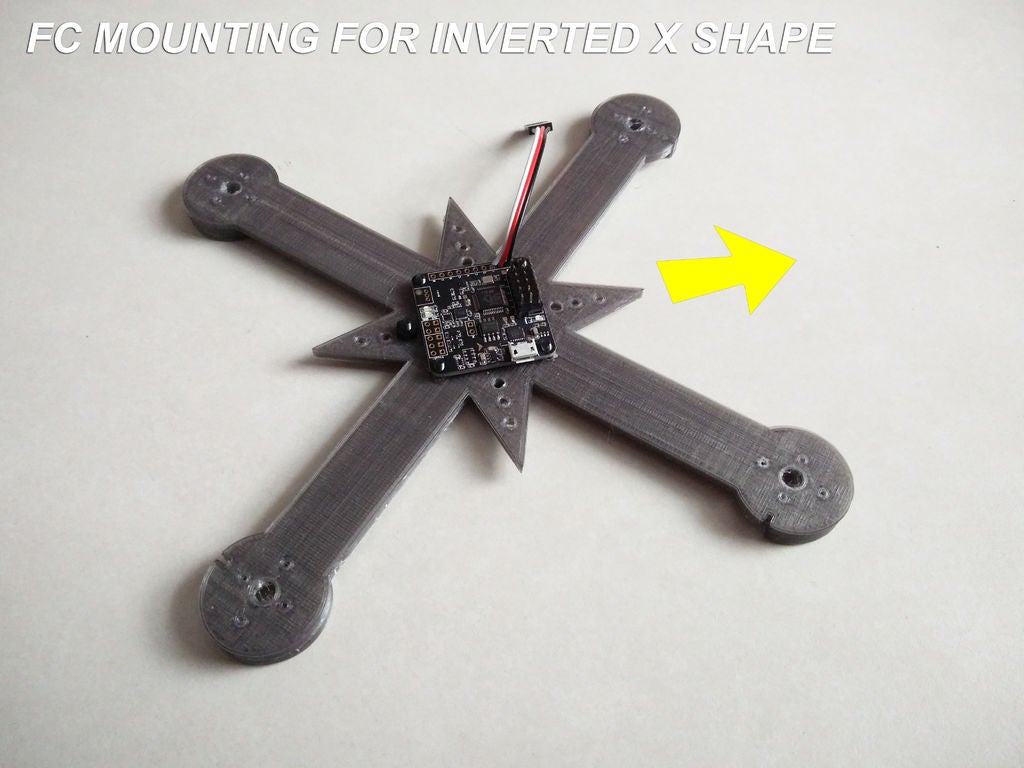
X形意味着你有2个前臂和马达以及2个后臂和马达。
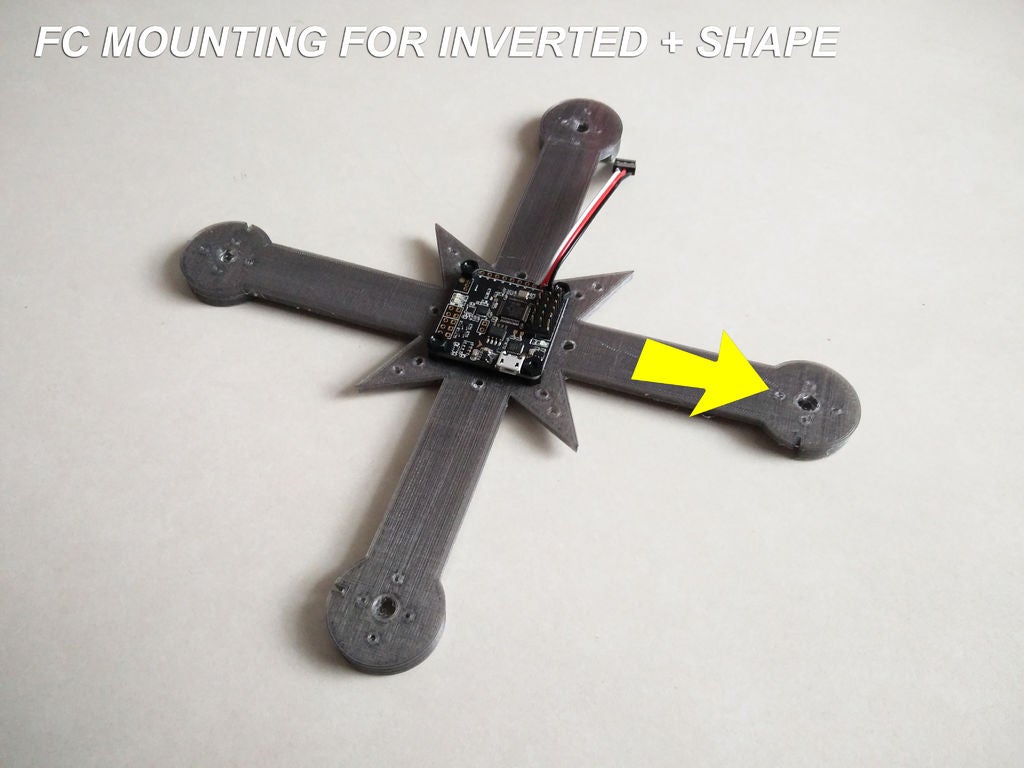
+形状意味着你有1个前臂和马达,2个侧面臂和马达以及1个后马达
如果您选择X形状,则必须将飞行控制器安装在对角线上,如果您选择+形状,只需将其安装在手臂的线上即可。
关于+与X形状有很多理论,但总的来说,性能大致相同,现在大多数赛车无人机都是X形,以避免在FPV摄像机前面有一个前螺旋桨,但是如果你把相机安装在上面,你会没事的。
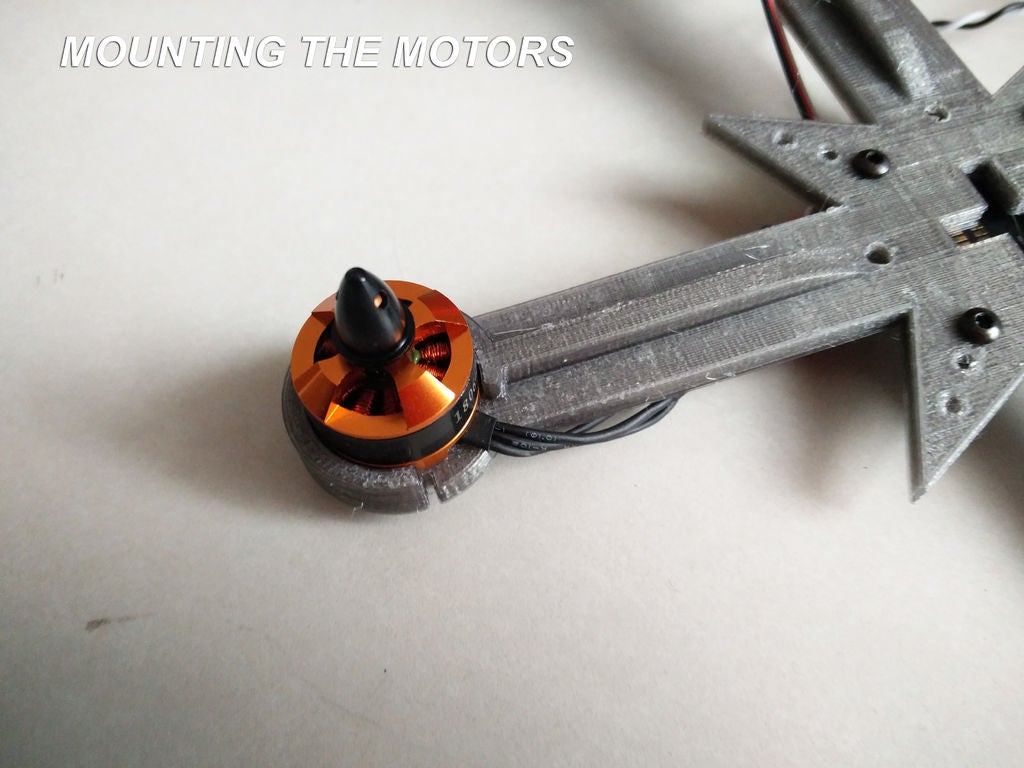
选择电机的方向:朝上(正常)或向下(倒置)!
现在,你可以选择你想要的电机了吗?面朝上,像99%的FPV赛车无人机,或者面朝下(是1%不同!! )
就纯理论性能而言,面向下的电机效率会更高一些!
为什么呢?因为螺旋桨产生的涡流(气流)将直接向下,而不是在小区域上击中手臂。这可能是微不足道的,但理论上,由于螺旋桨排气上的空气比进气口上的空气快,因此将气臂放在进气口上(电机朝下)使电机和螺旋桨更加高效!
选择安装主框架的位置&武器:在顶部或底部!
现在是时候选择是否要将主框架(带有支臂)放在底部(电子设备和机身下方)或顶部(电子设备和机身上方,这是一个“钟摆”配置)
钟摆配置往往更稳定,也更原始:)。
所以它有它的优点和缺点取决于你想做什么:对于自由式和accro飞行它可能不是最灵活的配置,但对于快速赛车它可以有它的好处。
选择其他配件:
我设计并包含了各种可选板,例如底板,您可以在其中插入电池或仅使用如果您计划安装gopro或不安装gopro,也可以使用2个不同的顶板。
您可以选择将电池安装在底部或顶部。同样适用于电子产品。
第3步:添加电子产品!
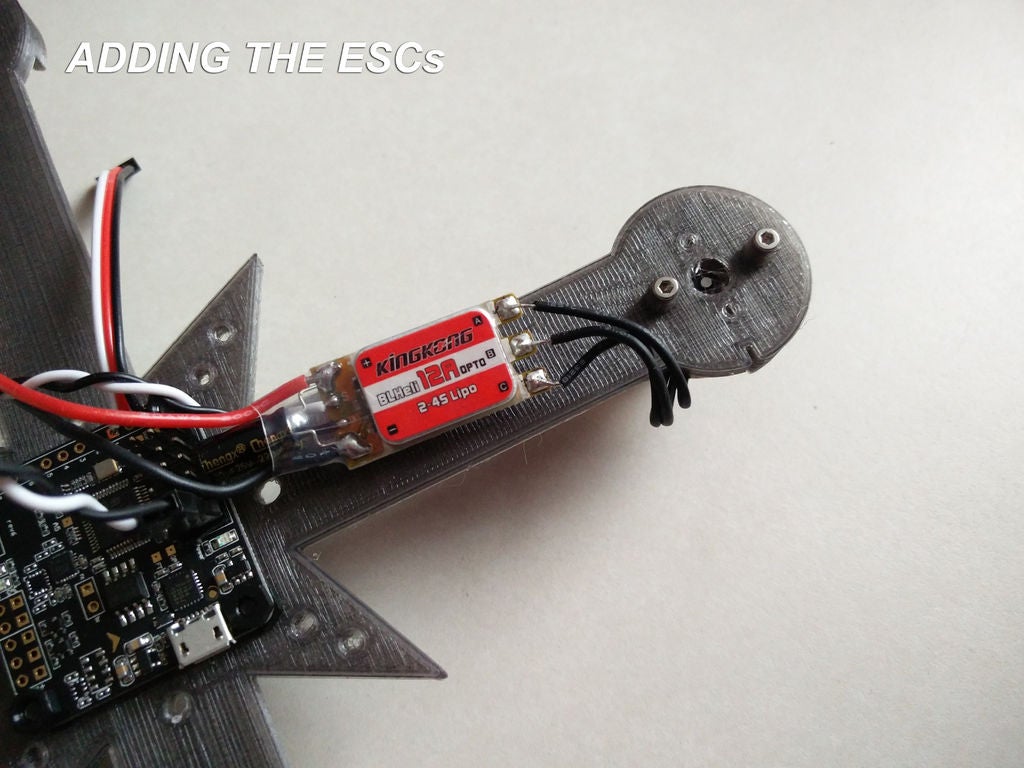
你现在必须添加飞行所需的电子设备,但不要担心!它并不像看起来那么困难,如果你知道如何焊接它实际上很容易(这是你必须要知道的,但它可以很容易地学习:))。
您可以从Banggood,eBay,Hobbyking,Aliexpress,Gearbest和其他无人机商店等网上商店购买所有零件。
所需零件清单及建议:
- 4 x 1806电机 - 价格从每台电机7美元起 - 较小1306尺寸或更大的2204电机也可能适合,但你必须钻新的安装孔。我推荐使用DYS 1806电机以获得最佳性能,但任何1806电机都可以工作。我实际上从Aliexpress购买了4台便宜的1806电机,它们工作得很好!
- 4 x ESC - 每个ESC起价5美元 - 电子速度控制器将控制电机的速度,你要选择至少12A ESC,20A ESC将是最好的。它们是多旋转ESC的两个主要固件:SimonK和BL Heli。我强烈推荐使用BL Heli ESC和BL Heli bootloader,因为它们更容易编程。在这架无人机上,我使用了KingKong 12A BL heli ESC,因为我有一些可以放置但是我认为如果你愿意为每个ESC支付11美元,最好的ESC是最受欢迎的Littlebee 20A ESC。
- 飞行控制器 - 起价13美元 - 无人机的大脑。对于这款无人机,你需要Naze32或CC3D飞行控制器。我个人更喜欢和推荐Naze32 ,因为他们有更多的配置选项,但两者都可以。使用Naze将配置从X形改变为+形状也会更快。 Naze32还允许您直接通过飞行控制器对ESC进行编程,这非常有用。与Naze32飞行控制器一起使用的软件是CleanFlight,BaseFlight或BetaFlight(全部免费),CC3D将使用OpenPilot(免费)。我使用了Naze 32 Rev 6飞行控制器,我从Banggood获得了13美元。
- (可选)配电板或BEC - 起价为3美元 - 配电实际上不是强制性的,但推荐用于干净设置,它会将电池的电力分配给ESC,飞行控制器,摄像机,VTX等。.. PDB集成了BEC,这意味着它们将在某处为5v输出启动飞行控制器。请注意,您的ESC可能已集成BEC以启动飞行控制器,但大部分性能ESC都是OPTO,这意味着它们没有BEC。如果您有OPTO escs并决定不使用PDB。你需要一个5V BEC来为飞行控制器供电。链接到一些PDB。
- 广播电台&接收器 - 起价50美元 - 这可能是更昂贵的部分,尽管如果你是RC爱好者,你可能已经拥有了。确保您的收音机至少有6个通道和一个PPM/CPPM接收器,这比标准PWM接收器更方便。我使用带有ia6B接收器的FlySky Fs i6,套装价格约为50美元,这是一款非常便宜的收音机。我实际上更喜欢它,我也有一些非常昂贵的Taranis。 FlySky FS i6无线电+接收器
- 电池电缆&连接器 - $ 2 - 要连接到PDB,最常见的连接器是XT60公头。对于电缆,请选择不薄的电缆,并且可以轻松处理电池最大电压的两倍或更多。
- 相机& 5.8 Ghz视频发射器(可选) - 相机和放大器的起价为15美元VTX 12美元) - 如果你想在FPV中飞行,那么你需要一个摄像头和5.8Ghz VTX。有很多不同的相机,CMOS,CCD,600到1000 TVL等。..选择将取决于你。还有很多不同的尺寸。我最喜欢的相机是FatShark 700 TVL虽然售价30美元并且远不是最便宜的(很多售价10美元),但它提供了非常清晰的图像并且非常可靠。对于VTX,我认为在Skyzone 200mw 5.8 VTX中最好的一款,售价12美元并且效果非常好,它也非常小。请注意,camera/vtx组合也存在大约30美元和超小尺寸。如果您使用FPV无人机,请不要忘记天线,当然,您还需要一些FPV谷歌或监视器和接收器。现在只需70美元即可拥有非常优质的谷歌+接收器!链接到一些相机示例。
- 螺旋桨 - 4个道具起价2美元 - 我推荐的螺旋桨和我使用的螺旋桨是DAL道具,DAL牛鼻或DAL V2道具,两个刀片和3刀片版本。它们几乎牢不可破,并且会有很大的推力。链接到DAL道具。
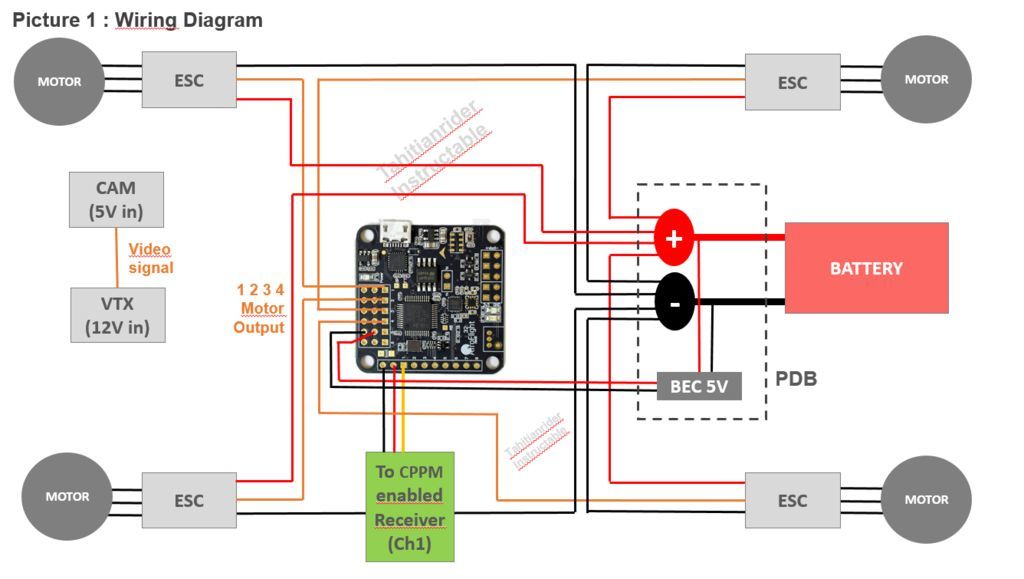
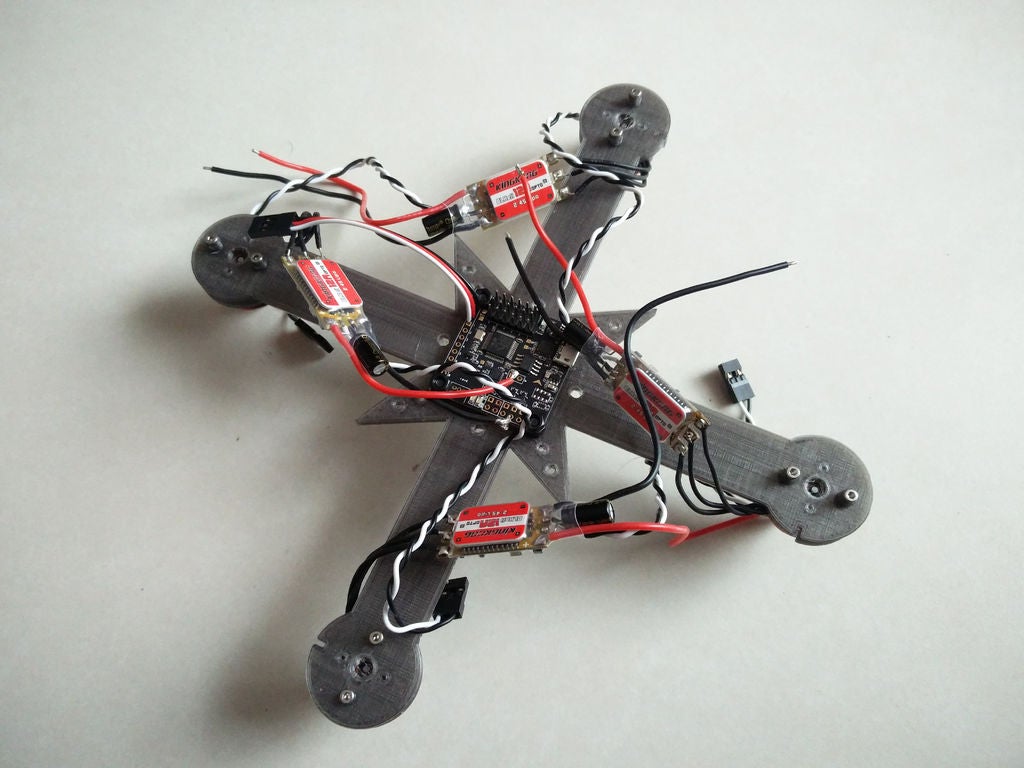
- 硬件 - $ 1 - 为了将飞行控制器和配电板(如果有的话)安装到您的机架上,塑料M3螺丝和&坚果可以很少。它们比金属更好,因为它们不会在电子设备上产生任何短路。在eBay上可以以5美元的价格购买一箱180多个塑料M3螺丝和螺母。安装&接线(图1)
一旦你得到了所需的所有组件,你就必须将所有组件放在一起!它几乎和插头一样简单玩!该接线图将帮助您了解如何将所有内容连接在一起,但我还将在要点中描述连接:
- 电池线到PDB电池输入
- 电机线到ESC:ESC上连接有3根电机线,如何连接电线无关紧要,只会影响电机的旋转感,但是如果你有一个BL Heli启动,这可以在编程ESC时改变负载Esc
- 4个ESC对PDB呈阳性(或电池,虽然不推荐)阳性,4个ESC阴性到PDB阴性。
- 4个ESC信号到飞行控制器电机输出1 2 3 4信号。电机的顺序将取决于您的飞行控制器,电机编号图将在您的FC软件上提供(Openpilot,Cleanflight等。..)
- PDB 5V输出到飞行控制器, FC上的5V输入实际上是电机输出(其中6个)引脚。所以只需选择一个引脚连接5V输入。
- 飞行控制器,正(5v),负和PPM(Ch 1)信号到接收器。
- PDB 5V输出到相机
- PDB 12V或更多(取决于您的VTX)输出到您的VTX。 - 相机信号到VTX就可以了!这就是你需要飞翔的一切!
建议:尽可能多地进行直接焊接,也就是说避免使用不必要的连接器,它们将成为潜在的故障点并占用大量空间,尤其是在较小的框架上。
步骤4:使用PC配置无人机


由于有许多不同的配置,您需要将无人机连接到PC进行配置,但不要担心,这非常简单!
连接后要做的第一件事就是根据您的选择在飞行控制器上选择“X”或“+”形状,并根据图纸设置每个电机的电机旋转。
软件
在根据相框的类型说明如何配置飞行控制器之前,我会给你关于您必须下载的软件的简短提醒:
根据您的飞行控制器,您需要下载其中一个软件,但我再次推荐使用Naze32:
对于Naze32 :Cleanflight(Chrome扩展程序)或BaseFlight(Chrome扩展程序)或BetaFlight。要将Naze32连接到PC,您需要使用micro USB线
对于CC3D: OpenPilot(确保下载支持CC3D的版本)大多数CC3D板使用迷你usb电缆,但最新的可能有micro usb插槽。
驱动程序:对于两个飞行控制器,您需要能够在连接到PC时识别FC的驱动程序,这里是:USB转UART驱动程序
配置
现在,我将制作关于Cleanflight的教程,我将假设你的飞行控制器已经刷新了最新版本Cleanflight,如果你不怎么做,你可以在这里阅读我之前的解释。
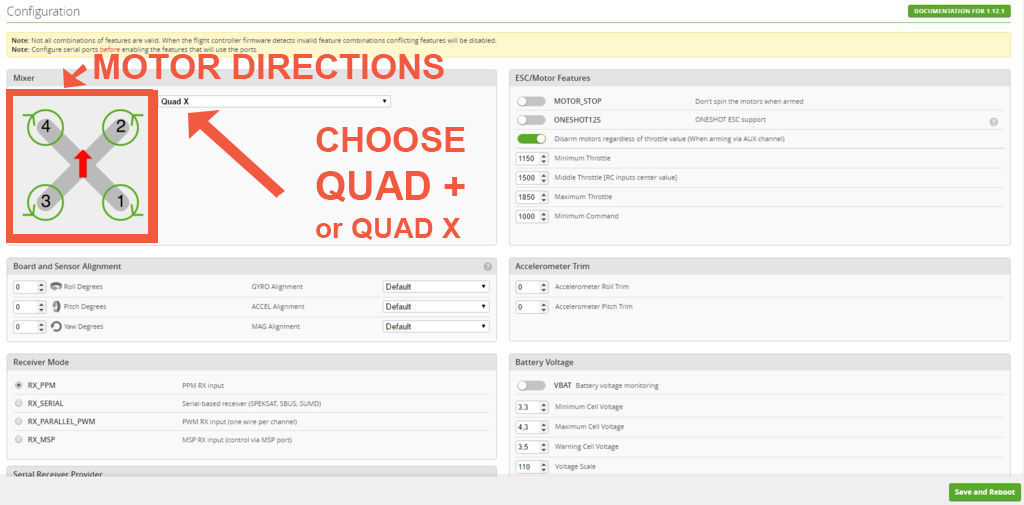
通过USB线将无人机连接到PC后,打开CleanFlight并单击“连接”,然后转到“配置”选项卡。
现在,在“混音器”区域,您必须选择无人机的帧类型,根据您安装无人机的方式选择“Quad +”或“Quad X”。
这实际上是您唯一需要做的事情! :)你也可以通过调整你的PID进一步进入你的配置,但这已经是一个非常先进的配置步骤,根本不是飞行所必需的。
一旦你选择了框架形状,将显示每个电机的旋转方向的图表,确保所有电机都朝正确的方向转动,我现在将解释如何检查这一点。
电机旋转感
在测试电机之前,确认已拆除螺旋桨。
旋转螺旋桨可能非常危险,因此请确保在此步骤之前已将其移除。
要测试电机的旋转方向,请转到“电机”选项卡,将电池插入无人机,然后通过移动小旋钮测试每个电机,并检查每个电机的旋转是否为与图中的那个相同,并且它没有反转。
如果某些电机旋转方向错误,只需记下它们的编号,这样我们就可以在编程ESC时更改它。
确保在测试每个电机时,你的四极管正确方向(它的鼻子朝前),并注意如果你有倒置电机,它不会改变。重要的是从无人机顶部看每个电机在哪个方向旋转,无论电机安装在哪个方向。
对ESC进行编程。
对于此步骤,您需要下载BL Heli Suite。
对ESC进行编程将允许您轻松更改旋转方向发动机。
如果你有像我这样的Naze32,你不需要特殊的编程电缆!只需使用USB线插入FC,打开BL Heli Suite,然后在“选择ATMEL/SILABS界面”选项卡中选择“SILABS BLHeLi bootloader(CleanFlight)。然后点击连接即可开始使用!
正如我所说的,编程ESC对于反转电机方向非常有用,无需在ESC和电机之间交换已焊接的电缆。
为此,只需选择您想要的电机即可通过取消选择屏幕底部小方块上的所有其他方来编程。然后,在“电机方向”区域,选择“反转”而不是“正常”。
如果您想了解更多信息关于ESC编程,这里有很多教程。
最终配置
现在,让我们回到CleanFlight对于配置的最后步骤。这些步骤将取决于您的个人偏好,但这里有一些建议。
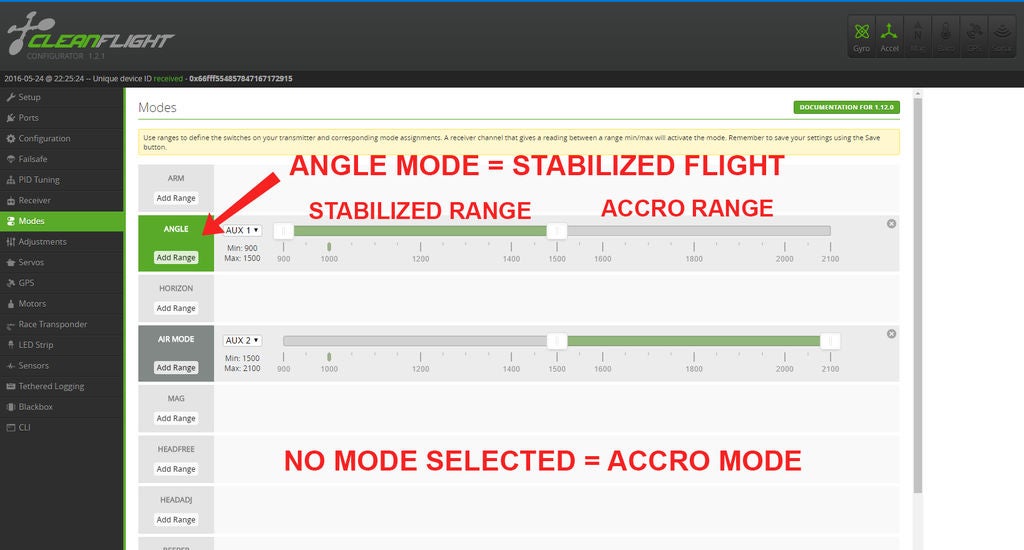
编程少数飞行模式可能很有用,默认情况下,清洁飞行中的Naze32是在accro模式,所以为起飞或着陆添加稳定模式(角度或地平线)可能很有用。
我还选择了添加空气模式,但你也可以选择用开关来装备你的无人机。
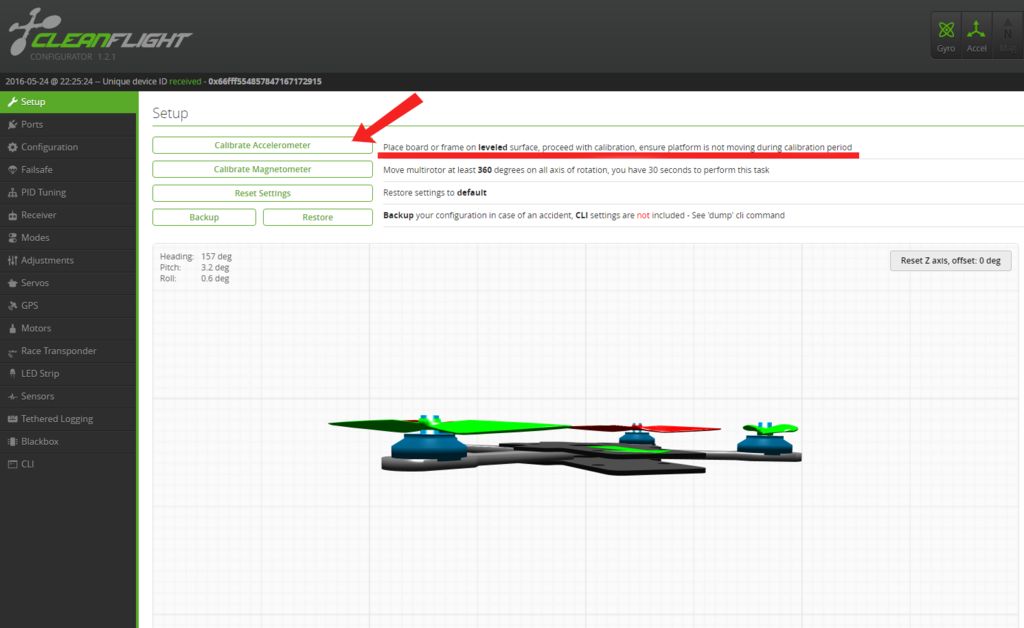
最后,完成配置后,返回主选项卡并通过将四轴飞行器放在水平表面上并按下“校准加速度计”来校准加速度计。
第五步:玩一个不寻常的无人机!


你去了,你现在准备飞! :)
您可以尝试一个帧配置,然后在几个航班后更改它,看看您喜欢哪种配置!
重要提示:
请始终合法地飞行并始终检查您的特定国家/地区法规(例如FAA)。这种无人机可能非常危险(切割螺旋桨并且能够达到高速),如果使用不当,很容易伤害人或造成财产损失。 始终安全飞行,远离人,居住或动物。
-
无人机
+关注
关注
230文章
10611浏览量
183988
发布评论请先 登录
相关推荐

激光毁伤系统:低空飞行器的 “隐形猎手”
重磅新品|CMW系列模块化连接器

MATLAB在低空飞行器中的应用

全球第四 科华数据蝉联全球模块化UPS榜单
模块化示波器的技术原理和应用
模块化仪器的技术原理和应用场景
模块化插座接线方法有哪些
电压放大器在可变形机翼缩比模型主动变形实验中的应用
安波福模块化连接器的优势
利用图像处理板避障 让小型飞行器像昆虫一样灵巧

高清画质、低时延,图传技术如何展现FPV穿越机的“速度与激情”

上海峰飞航空领先全球低空飞行器领域,展望2040年
基于非线性自适应学习控制器的四轴飞行器避障方案





 工商网监
工商网监
评论