 自动机器人的制作
自动机器人的制作
步骤1:准备


使用打孔器在安装胶带的中间放一个孔。切割约1英寸的收缩管。将胶带,面包板,光电池,电池座,晶体管,电机和电子管放入袋中。用纸盘分发袋子。抓住大头钉和电池供以后使用。
步骤2:连接电机
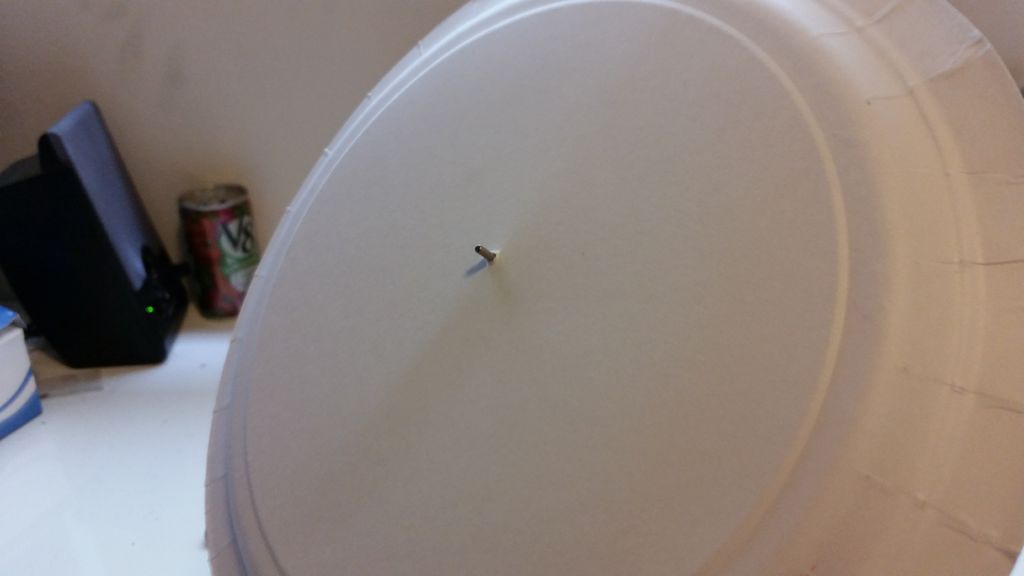




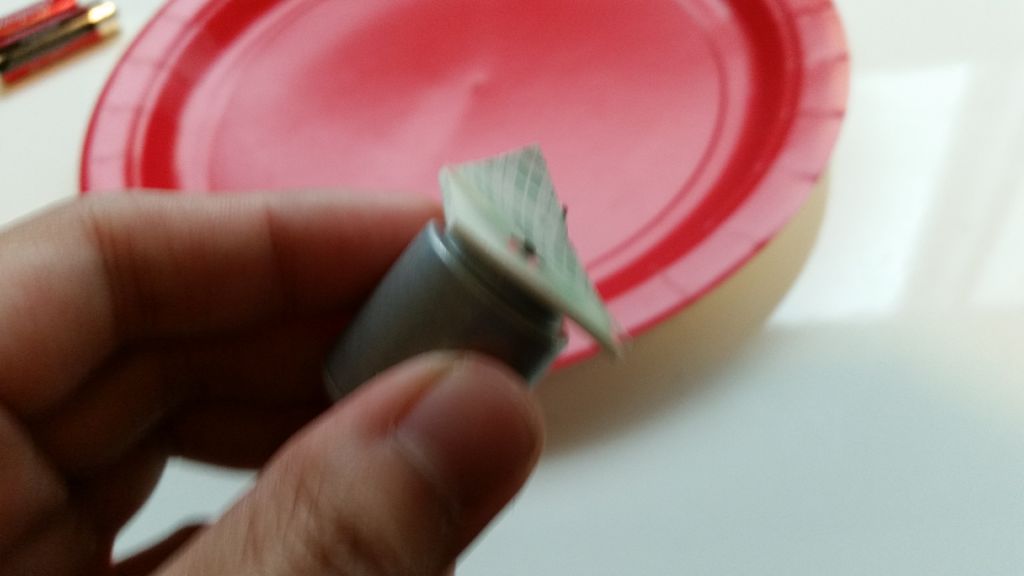
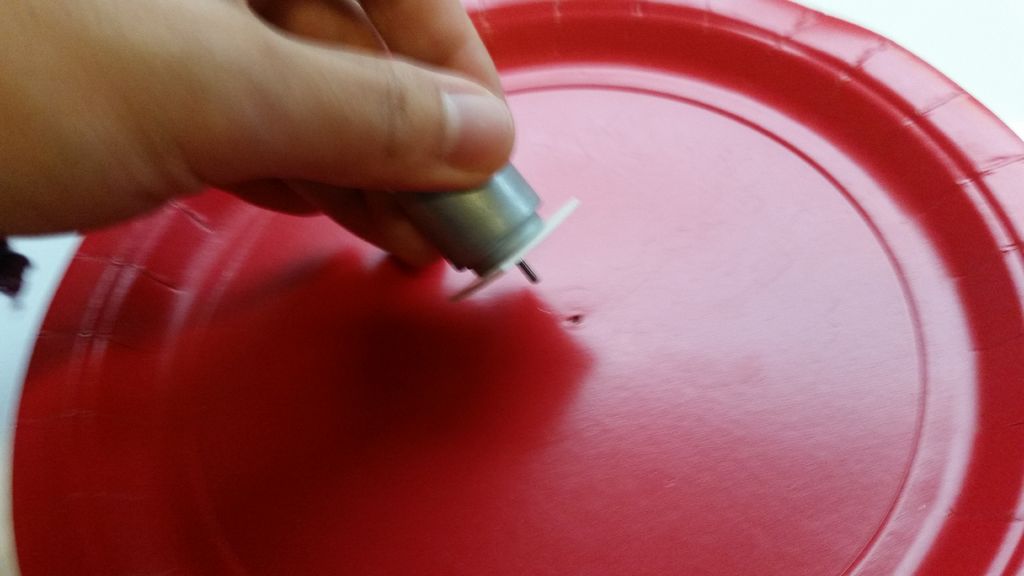
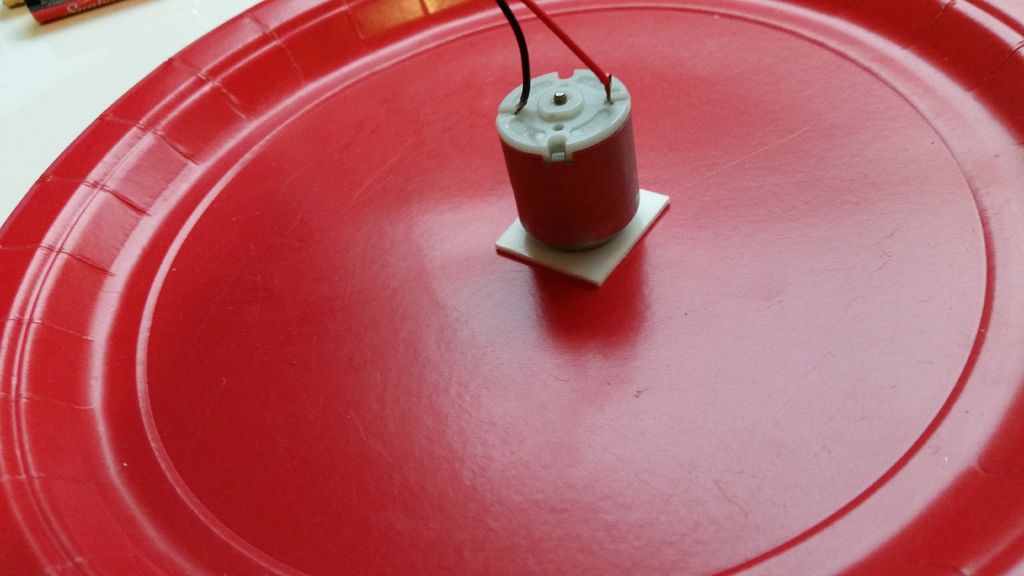
将电机轴推入靠近的纸盘盘子的中心。从纸带的一侧剥离纸张,然后将胶带粘在电机上。确保电机轴完全穿过孔。剥掉另一张纸,然后将马达粘在盘子上。
步骤3:开始面包板
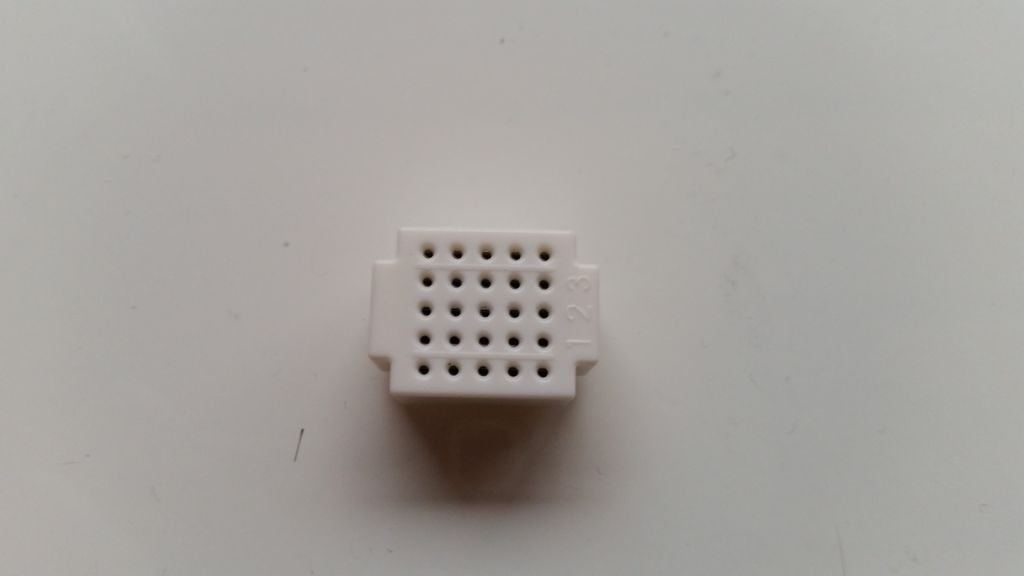
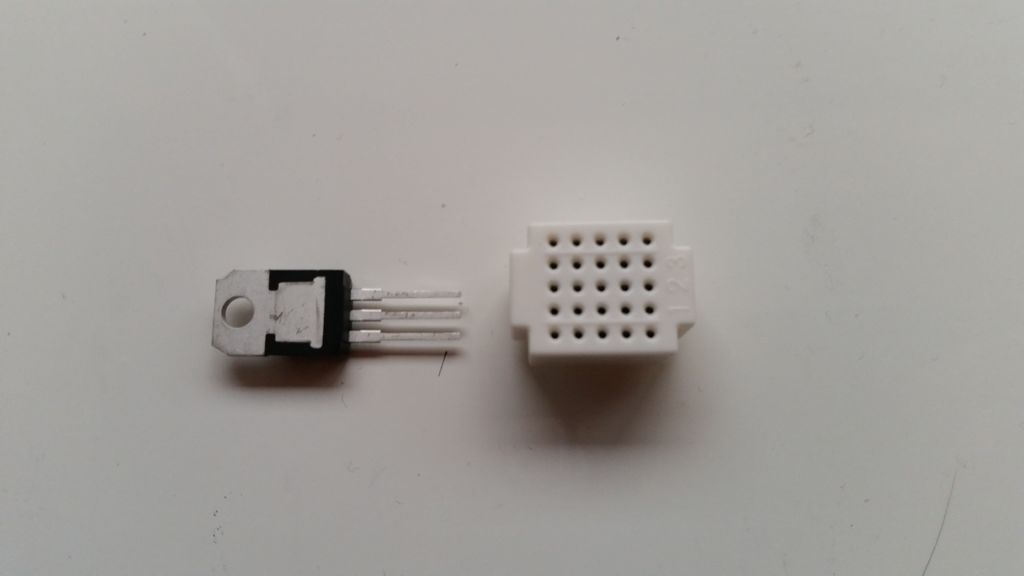
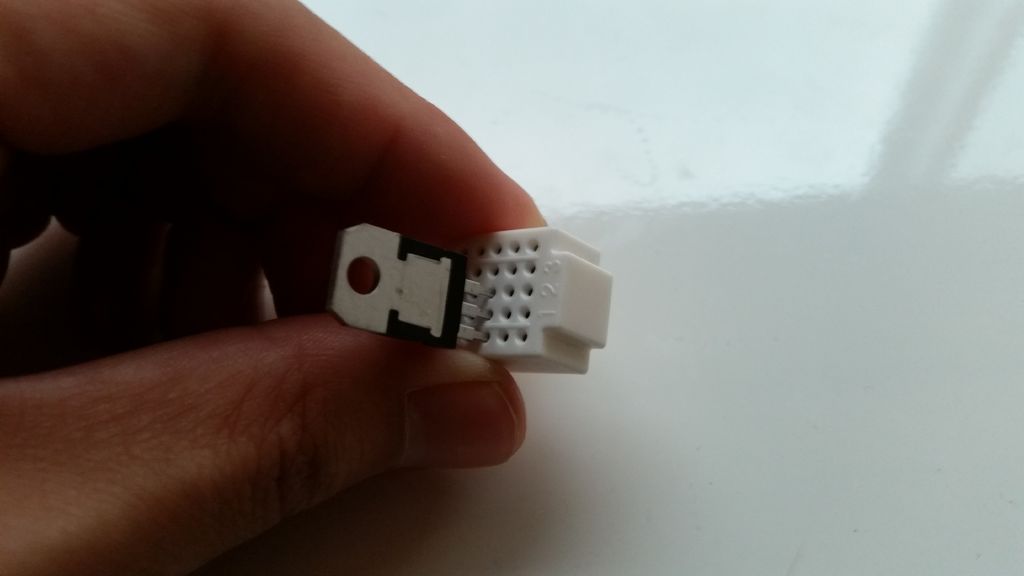
确保每个人都以相同的方式定向面包板。面包板有两面“凸起”。这些方面将是左右两边。晶体管具有黑色侧和金属侧。将金属面朝右的晶体管放入面包板的中间列。三条腿应位于面包板的三个底行。
步骤4:光电池
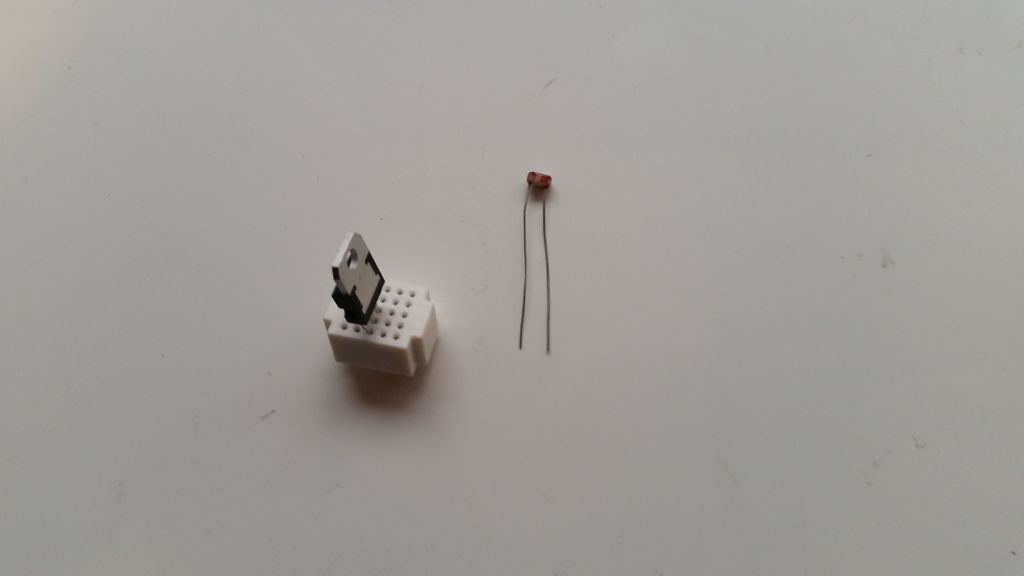
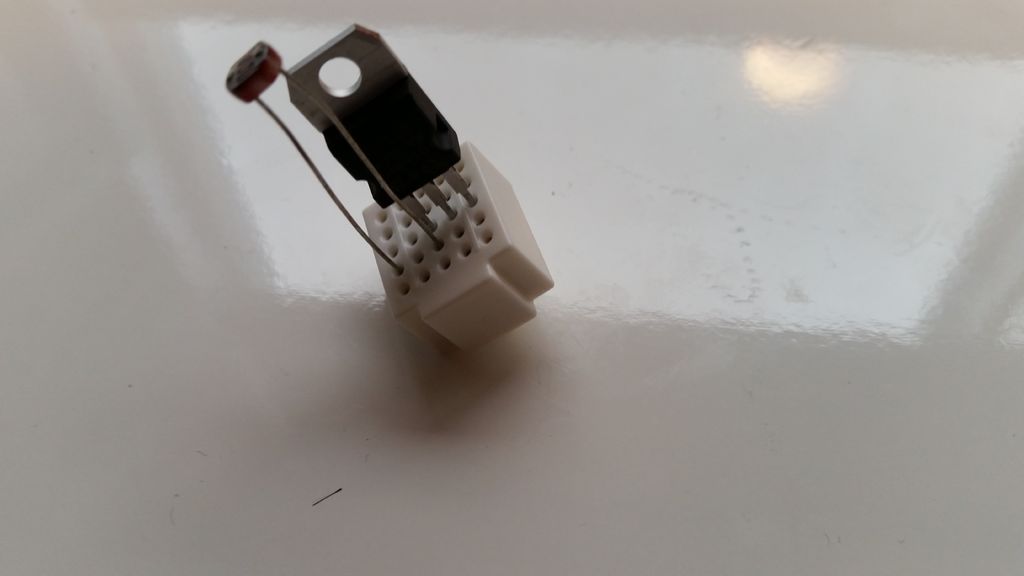
光电管进入晶体管左侧的列。它的腿应位于顶行和顶行的第三行。它没有极性。
步骤5:电机



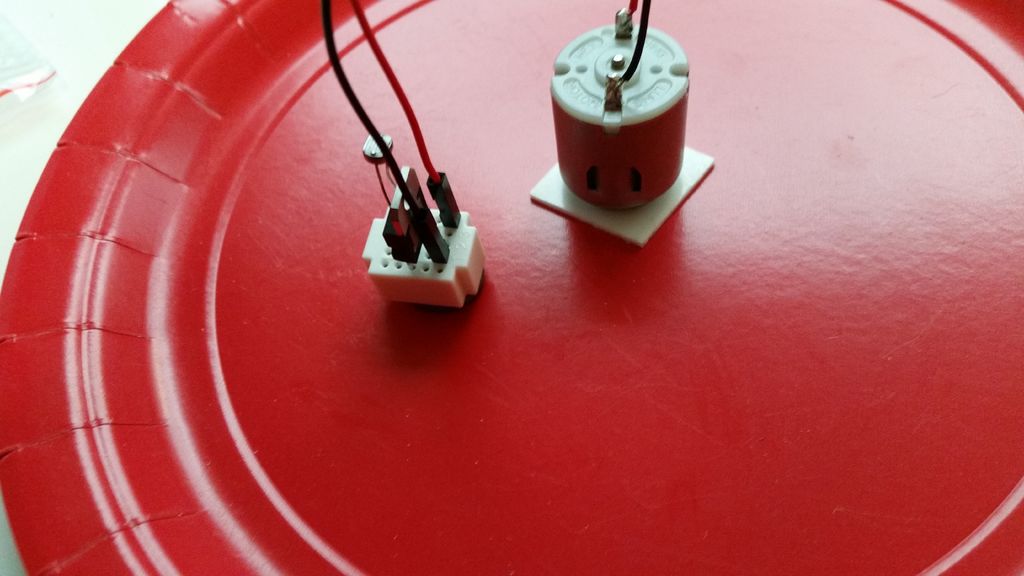
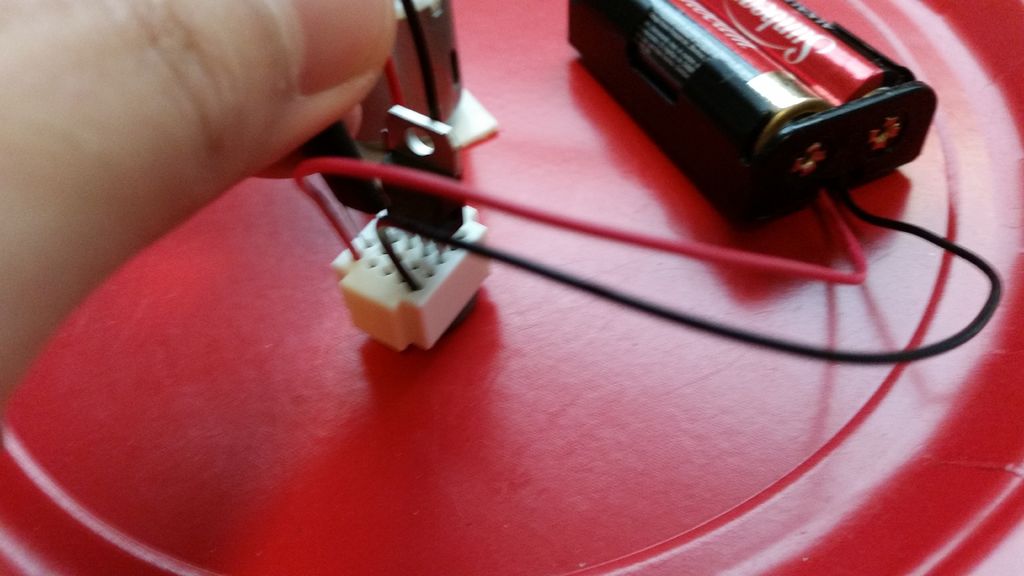
电机的红线进入面包板的右上角孔。电机的黑线进入最右边的列,从顶部开始第四排。使用一团粘性粘性将面包板连接到印版上。
步骤6:电池
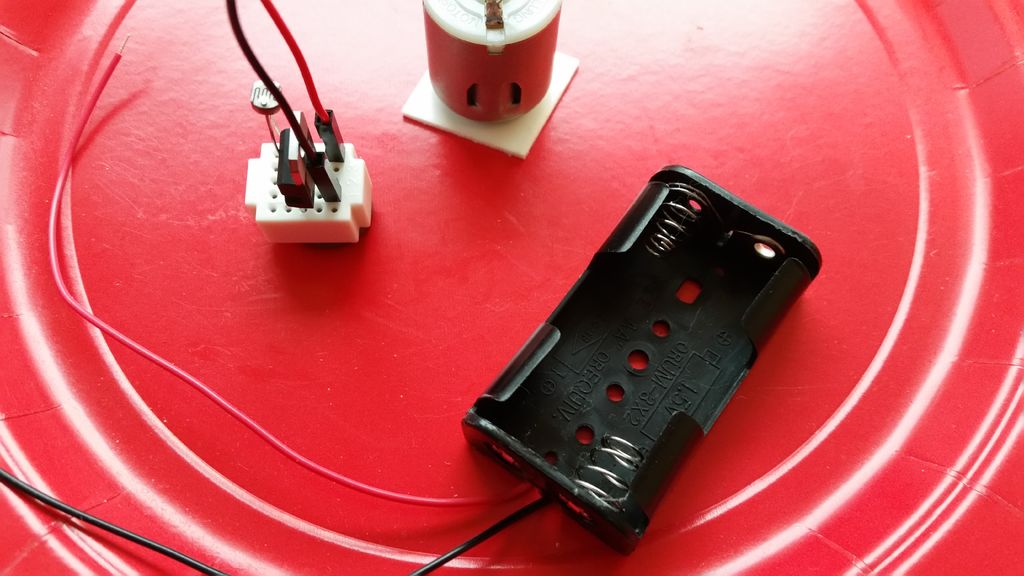



电池座的红线进入面包板的左上角孔,黑线进入面包板的左下角。用一小块粘性粘性将电池座固定在印版上。
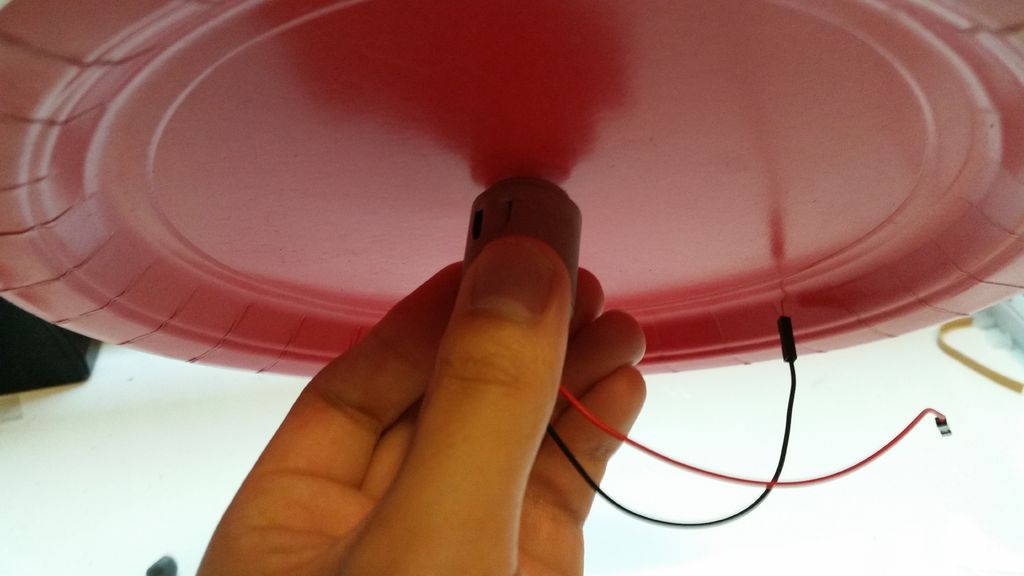
步骤7:确保其正常工作



将电池放入电池座,电路板应开始旋转。将管放在光电管上,板应停止。调整管的高度以调整光电管的灵敏度。拔下其中一根电池线以关闭机器人,将其重新插上以打开。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
210文章
28190浏览量
206459
发布评论请先 登录
相关推荐
智能移动机器人系统方案指南
自主移动机器人 (AMR) 和自动导引车 (AGV) 是具有移动、感知和连接能力的无人机器人,用于运输和移动各种重量和尺寸的负载,以及执行其他功能。此类机器人通常由电池供电,典型电池电

开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 09-03 09:34
开源项目!用ESP32做一个可爱的无用机器人
简介
作者在完成硕士论文答辩后,利用空闲时间制作了一个他一直想做的机器人——可爱无用机器人。
无用机器人原理是一个连接到开关的电机,通过逻辑门控制。当开关被推到“开”时,
发表于 08-30 14:50
智能移动机器人
富唯智能移动机器人分为复合机器人和转运机器人,搭载ICD核心控制器,实现一体化控制,最快可实现15分钟现场机器人的快速部署,无缝对接产线,配合自研2D/3D视觉系统,精准抓取搬运工件。

探索AC自动机:多关键词搜索的原理与应用案例
方法的效率会显著下降,尤其是在需要与词典进行详尽对比的场景中。本文将介绍的Aho-Corasick(AC)自动机作为多模式匹配中的经典算法,不仅能够处理大规模文本数据,还能确保搜索过程的实时性和准确性。 AC自动机:文本搜索的革命性工具 AC
如何借助恩智浦MCX系列MCU纠错功能,打造可靠安全的移动机器人?
移动机器人的应用场景日益增多,覆盖工业自动化到服务型机器人等领域。保障移动机器人的操作安全可靠至关重要,因为它们承载的任务更加复杂,且运行环境不可控。 恩智浦新一代MCX系列微控制器

Al大模型机器人
金航标kinghelm萨科微slkor总经理宋仕强介绍说,萨科微Al大模型机器人有哪些的优势?萨科微AI大模型机器人由清华大学毕业的天才少年N博士和王博士团队开发,与同行相比具有许多优势:语言
发表于 07-05 08:52
自动停车机器人,如何快速构建?
停车机器人是用于在停车场或车库等场所中进行车辆的自动停放和取车操作。随着智能交通和智能城市的发展,停车机器人在解决停车难、提高停车效率和减少停车空间浪费等方面具有广阔的应用前景。 ▲停车移动机

海康机器人第100000台移动机器人下线
海康机器人第100000台移动机器人已经成功下线 。这是一个重要的里程碑,标志着海康机器人在全品类移动机器人(AMR)领域取得了显著的进展。
全自动机器人激光焊接机主要用于哪些行业
编辑:镭拓激光全自动机器人激光焊接技术应用于多个行业中发挥着越来越重要的作用,为制造业的升级转型提供了有力支持。随着技术的不断进步,其应用领域还将进一步扩大,以下是一些主要应用领域:汽车制造业:在

自主移动机器人(AMR)功能和特点
复合机器人是一种集成了移动机器人、协作机器人和机器视觉等多项功能的新型机器人。它的开发目的是为了解决工厂物流中最后一米的问题,提供智能搬运解

富唯智能机器人集成了协作机器人、移动机器人和视觉引导技术
富唯智能移动机器人是一款拥有自主导航能力和物料转移抓取功能的智能机器人,采用先进的无线通信技术和高精度传感器,能够实现自主导航和避障,完成生产线上的物料转运任务,并与其他设备实现无缝对接。此外,富唯

科聪停车移动机器人整体解决方案!
停车机器人是用于在停车场或车库等场所中进行车辆的自动停放和取车操作。随着智能交通和智能城市的发展,停车机器人在解决停车难、提高停车效率和减少停车空间浪费等方面具有广阔的应用前景。科聪停车机器人






 工商网监
工商网监
评论