 动物在水中有许多创造性的活动方式,而机器人正在“模仿”它们
动物在水中有许多创造性的活动方式,而机器人正在“模仿”它们
动物在水中有许多创造性的活动方式,而机器人正在“模仿”它们。
大多数水下机器人运动方式是以下这两种之一:第一种是螺旋桨,第二种是鳍。但是动物告诉我们,水下运动方式还有很多种,可能给机器人带来独特的好处。我们看看今年ICRA发表的两篇论文,展示了仿生水下机器人以创新的方式移动:一个喷射动力的机器人鱿鱼可以跳出水面,另一个机器人扇贝可以像真的一样移动。
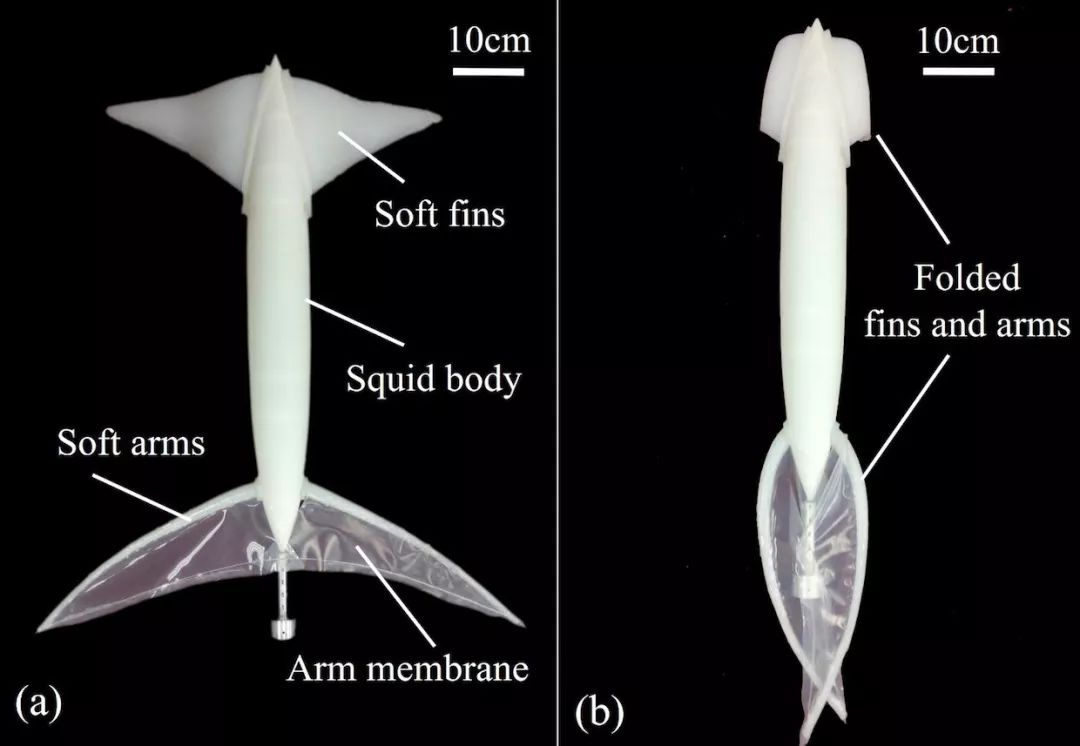
Image:Beihang University
这架来自中国北航大学的“鱿鱼式水上飞行器”是仿照飞行的鱿鱼而设计的。真正的鱿鱼,除了好吃外,可以利用喷水器推进自己前进。而且喷射器足够强大的话,一些鱿鱼不仅可以跳出水面,而且实际上可以通过在空中继续喷射来短时间内实现受控飞行。飞行阶段是通过使用鳍作为手臂和翅膀来产生一点升力来延长的。真正的乌贼使用这种多模态推进来躲避掠食者,而且速度也快得多——乌贼在空中飞行时可以使正常的游泳速度翻倍,每秒飞行50个身体长度。
鱿鱼机器人主要由压缩空气驱动,压缩空气储存在鼻子里的圆柱体中(鱿鱼有鼻子吗?)鳍和臂由气动执行器控制。当机器人想要在水中移动时,它会打开一个值,释放少量的压缩空气;同时释放空气会产生足够的推力,将机器人鱿鱼完全从水中射出。
我们被告知机器人乌贼可以通过跳跃在10到20米之间移动,而在水下使用它的喷射器只需要10米。目前,乌贼只能发射一次喷射器,但研究人员计划用密度更大的气体代替压缩空气,如液态二氧化碳,这将允许长时间的操作和多次跳跃。研究人员说,使用鳍进行动态控制还有很多工作要做,这将“揭示自然飞行乌贼运动的优越性”。
来自中国北航大学的Taogang Hou, Xingbang Yang, Haohong Su, Buhui Jiang, Lingkun Chen, Tianmiao Wang,和Jianhong Liang在2019蒙特利尔国际航展上介绍了“带软变形鳍和臂的鱿鱼式水上飞行器的设计和实验”。
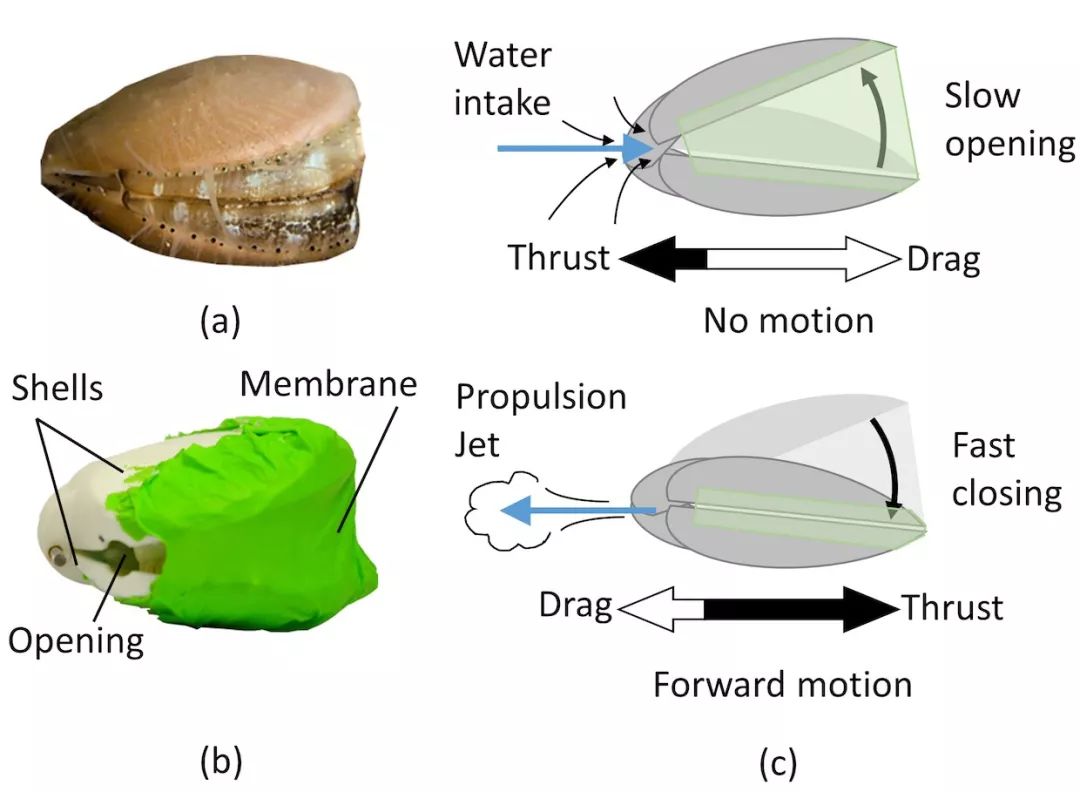
Image: EPFL
机器人扇贝,是一个“Bivalve inspired(双瓣激发)游泳机器人”,来自Jamie Paik领导的EPFL的可重构机器人实验室。真正的扇贝,除了好吃之外,可通过打开和关闭贝壳来推动自己,从背后产生水射流。扇贝通过反复缓慢地打开外壳,然后快速地关闭,可以产生完全在身体内部的向前推力。相对于像鳍或旋转螺旋桨这样的东西,扇贝是简单而结实的,特别是当你缩小比例或开始观察大量的机器人时。EPFL的研究人员将他们的扇贝机器人描述为“一种对危险或持续使用具有鲁棒性的独特组合,在精密环境中安全,设计简单。”
机器人扇贝即使在工作时也是安全的。由于机器人将水吸入,然后立即喷射出来,因此其设计能够抵抗污染,这在海洋环境中可能是一个重大问题。机器人扇贝原型重65克,可以每秒16厘米的速度轻快地前进,而拍手(这是实际的技术)的频率略高于2.5赫兹。虽然机器人扇贝现在还不配备转向功能,但真正的扇贝是可以通过向一侧喷射更多的水来改变方向的,而机器人扇贝也应该能够做到这一点。研究人员还指出,机器人扇贝本身甚至可以兼作钳子,据我所知,这却不是真正的扇贝能做的哦。
-
机器人
+关注
关注
211文章
28390浏览量
206947 -
水下机器人
+关注
关注
2文章
94浏览量
13643
原文标题:机器人鱿鱼和机器人扇贝展示仿生水下推进
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》第1-6章阅读心得之具身智能机器人系统背景知识与基础模块
开源项目!OpenCat—— 一个全能的平价四足机器人
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
工业机器人常用的编程方式

柔性机器人与刚性机器人区别与联系

Al大模型机器人
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
FMEA与机器人:如何确保机器人技术的可靠性与安全性
巡检机器人有哪些功能和作用?






 工商网监
工商网监
评论