 一个液体电池可以同时充当液压油,帮助这个机器人游泳36小时
一个液体电池可以同时充当液压油,帮助这个机器人游泳36小时
一个液体电池可以同时充当液压油,帮助这个机器人游泳36小时。
生物是极其复杂的,当我们制造机器人(甚至是仿生机器人)时,我们大多只是尽最大努力去匹配动物的功能,而不是它们的结构细节。这方面的一个例外是液压机器人,它的工作原理和蜘蛛一样,通过泵送加压液体来移动四肢。不过,这比实际的生物灵感更具副作用,因为蜘蛛仍然击败机器人,因为它们将血液用作液压流体,并做血液所做的一切,比如在需要的地方输送营养和氧气。
在近日发表在Nature上的一篇论文中,康奈尔大学和宾夕法尼亚大学的研究人员提出了一种机器人鱼,它使用人工循环系统中泵入的合成血液,为肌肉提供液压动力,并提供分布式电源。这种液压液组成的人工合成血管(人造循环)系统,可以通过机械传动和电力驱动的方式为软体机器人提供动力。在对该系统的测试中,一个软体的机器狮子鱼能够逆流游动,拍动胸鳍。
这条鱼具有令人印象深刻的耐力,最大理论操作时间超过36小时,同时以每分钟1.5体长的速度游泳。关键在于鱼的血液,它(除了为软执行器提供液压动力)是氧化还原流动电池的一半。血液是一种液态三碘化物阴极,它在浸在电解液中的锌细胞中循环。当锌氧化时,它释放电子,为鱼的微控制器和泵提供动力。这个动力系统的理论能量密度是每升322瓦时,或者说是每升676瓦时的一半,你可以在为特斯拉提供动力的锂离子电池中找到。
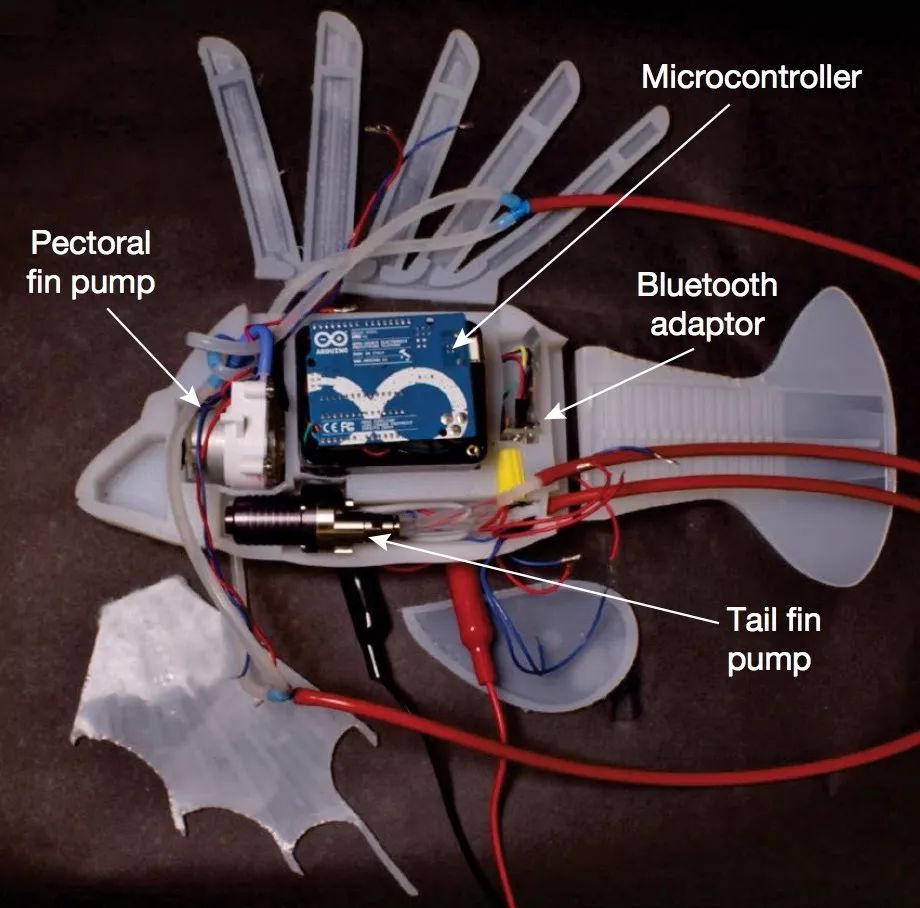
美国康奈尔大学研究人员Robert Shepherd和他的同事认为,机器鱼身体内部用于传递动力的液压液,应该还具有储存能量的潜力。研究团队使用含有碘化锌的液压液,制成了一种人工合成血管系统,并将其嵌入仿生狮子鱼体内。这种液体会在机器鱼的周身循环,通过电化学反应驱动机器鱼内部搭载的泵和其它电子器件。与此同时,液体的泵送还能向鱼鳍传递机械能,从而帮助机器鱼在游泳的时候保持平衡。
研究人员表示,这一技术成果将帮助提升未来机器人设计的能量储存、效率和自主性。
-
机器人
+关注
关注
211文章
28493浏览量
207448 -
液压机器人
+关注
关注
0文章
3浏览量
7513
原文标题:人工血液可以驱动机器鱼“游泳”
文章出处:【微信号:IEEE_China,微信公众号:IEEE电气电子工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
开源项目!能够精确地行走、跳舞和执行复杂动作的机器人—Tillu
【「具身智能机器人系统」阅读体验】+两本互为支持的书
【「具身智能机器人系统」阅读体验】+初品的体验
【书籍评测活动NO.51】具身智能机器人系统 | 了解AI的下一个浪潮!
喷涂机器人的关键术语和核心参数介绍
开源项目!用ESP32做一个可爱的无用机器人
开源项目!用ESP32做一个可爱的无用机器人
供应 英集芯IP2348,适用于扫地机器人解决方案的锂电池同步降压充电芯片
Al大模型机器人
液压系统中的辅助元件包括哪些?
其利天下技术·搭载无刷电机的扫地机器人的前景如何?
DIY推荐!自制一个基于ESP32的沙画机器人
机器人是如何工作的 机器人工作原理解析





 工商网监
工商网监
评论