 循环车速表DIY图解
循环车速表DIY图解
第1步:结构



这个项目非常重要的是拥有强大而稳定的支持。我们的想法是,当它面对一个坑洞时,或者当你决定玩得开心并在艰难的环境中骑行时,周期可能会受到沉重的冲击。此外,当车轮上的磁铁穿过支架上的霍尔效应传感器时,我们会输入输入。如果所有事情同时出错,arduino将显示高速铁路的速度。另外你不希望你最好的朋友arduino因为你决定懒惰并使用一些便宜的材料而落在路上
所以,为了安全起见,我决定选择铝条因为它们可以很容易地切割和钻孔,耐腐蚀且便宜,这对于DIY来说总是有益的。
我还使用了一些螺母(带垫圈)和螺栓将它们固定在框架上,因为它们必须牢固地放在底盘上。如果你把错误放在一边并且必须重新安置它们,这也会有所帮助。
另一个重要的部分是,如果它们是由我制造的任何金属制成,电子元件必须与支架正确隔离。我使用的热胶很好用,因为它也吸收了一些震动并缓冲了显示屏。
第2步:传感器和磁铁



测量和输入项目的一部分依赖于这个部分。想法是在循环轮上放置一个磁铁并在框架上添加一个霍尔效应传感器,这样每次磁铁穿过传感器时,arduino都知道旋转完成并且可以计算速度和距离。
这里使用的传感器是经典的 A3144 霍尔效应传感器。当特定磁极面向正确方向时,该传感器将其输出拉低。方向非常重要,因为外极不会影响输出。
以下是一些显示正确方向的图片。霍尔效应传感器还需要一个10k的上拉电阻。在我的项目中,用arduino中的20k上拉电阻代替。
小心放置磁铁重要。将其放置一点到远可能导致读数不一致或旋转丢失并且将其放置得非常接近可能导致磁体接触传感器,这是不太理想的。
如果仔细观察,车轮将与轴有一些倾斜,这将导致结壳和波谷。尝试将磁铁放入槽中。我个人没有那么多努力。
第3步:显示
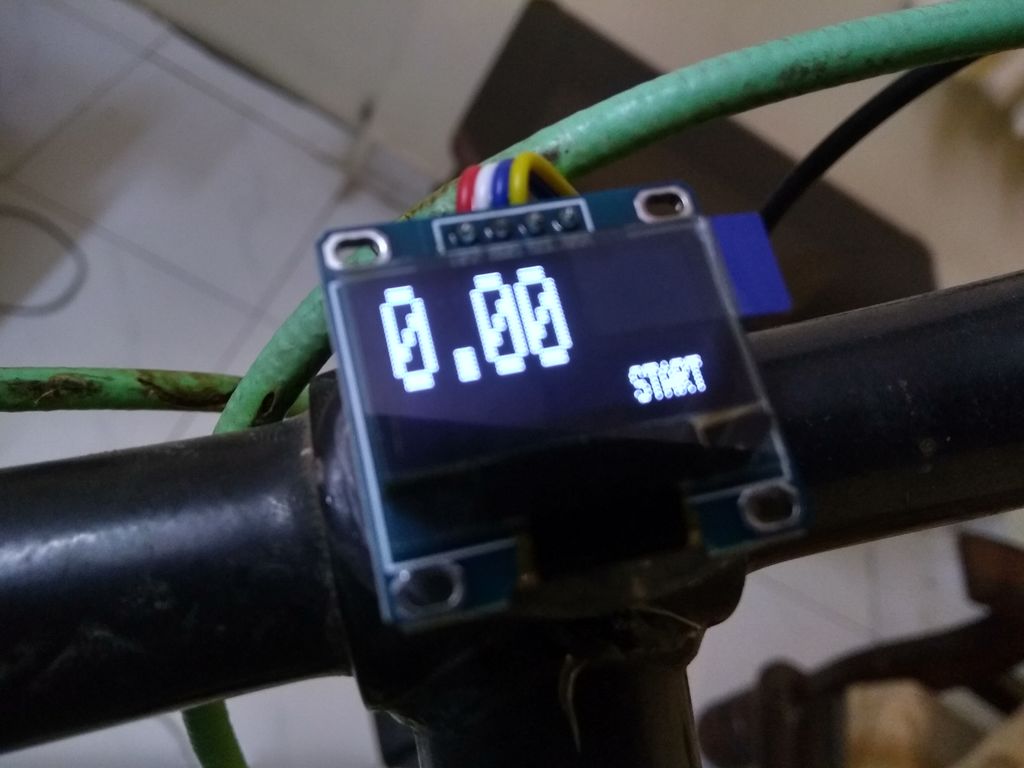



这个显示在理论上是可选的,但你需要一些东西来显示速度和距离并实时加速。考虑使用笔记本电脑是完全荒谬的。我使用的显示器是0.96英寸的OLED显示器,I2C作为从设备和主设备之间的通信协议。
张贴的图片显示了arduino自动切换的三种模式。
1)左下角开头小的那个是arduino刚刚启动并成功的时候启动。
2)以km/hr为单位的是速度。此模式仅在循环运行时显示,并在循环停止后自动关闭。
3)最后一个以米为单位(公制系统万岁)作为单位显然是循环的距离旅行。一旦循环停止,arudino开关将在3秒内显示距离
这个系统并不完美。即使在循环运动时,它也会暂时显示行进的距离。虽然这显示出一个不完美的地方,但我觉得这个很不错。
第4步:电源

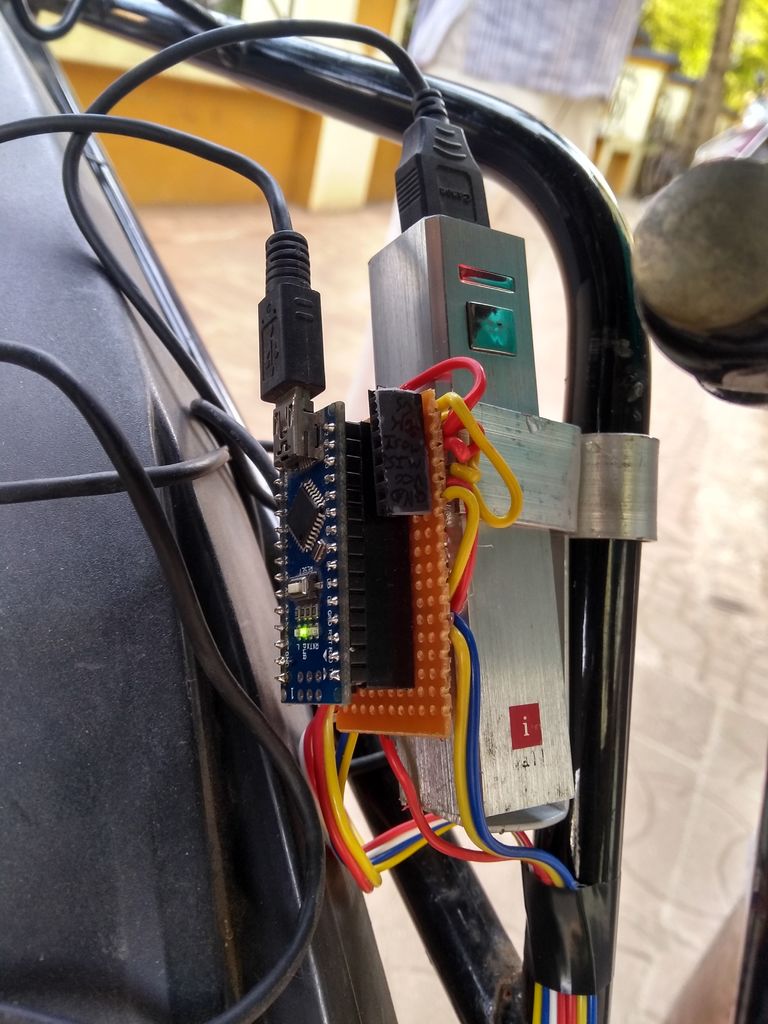
该项目有点笨重,不能总是有附近的墙上插座可供充电。所以我决定懒惰,只需使用移动电源作为电源,并使用迷你USB电缆将移动电源的USB电源连接到arduino nano。
但是你需要选择电源小心。重要的是要有一个合适的几何形状,以便它可以很容易地安装。我只是爱上了我用于这种常规和方形几何形状的移动电源。
此外,移动电源必须有点哑。事情是为了节省功率,如果电流消耗不高于某个阈值,则电源组被设计为关闭输出。我怀疑这个阈值至少为200-300 mA。我们的电路最大电流消耗不超过20mA。因此,正常的移动电源将关闭输出。这可能会让您相信您的电路存在故障。这个特定的移动电源工作时有这么小的电流消耗,这给了我另一个喜欢这个移动电源的理由。
步骤5:Brakelight(完全可选)


作为附加功能,我决定添加制动灯。问题是,如果我打破了,我怎么能找到。事实证明,如果我制动循环减速。这意味着,如果我计算加速度,如果结果为负,我可以打开刹车灯。然而,这意味着即使我只是停止踩踏板,灯也会亮起。
我也没有在我的灯光中添加晶体管,这是完全推荐的。如果有人做了这个项目并正确地整合了这个部分,我会非常高兴地看到并为此添加图片。
我直接从arduino nano的数字引脚2中获取电流
第6步:程序
我一直在Arduino IDE上编写程序。我最初的目标是将参数记录到SD卡上。但不幸的是,在这种情况下,我将不得不使用三个库,SD.h,Wire.h和SPI.h.这些与核心相结合占据了84%的可用内存,IDE警告我稳定性问题。然而,不久的是,贫穷的纳米每次都会崩溃,一切都冻结了。重新启动导致重复历史记录。
-
车速表
+关注
关注
0文章
14浏览量
8297
发布评论请先 登录
相关推荐

rnn是递归神经网络还是循环神经网络
循环神经网络算法原理及特点
循环神经网络的基本概念
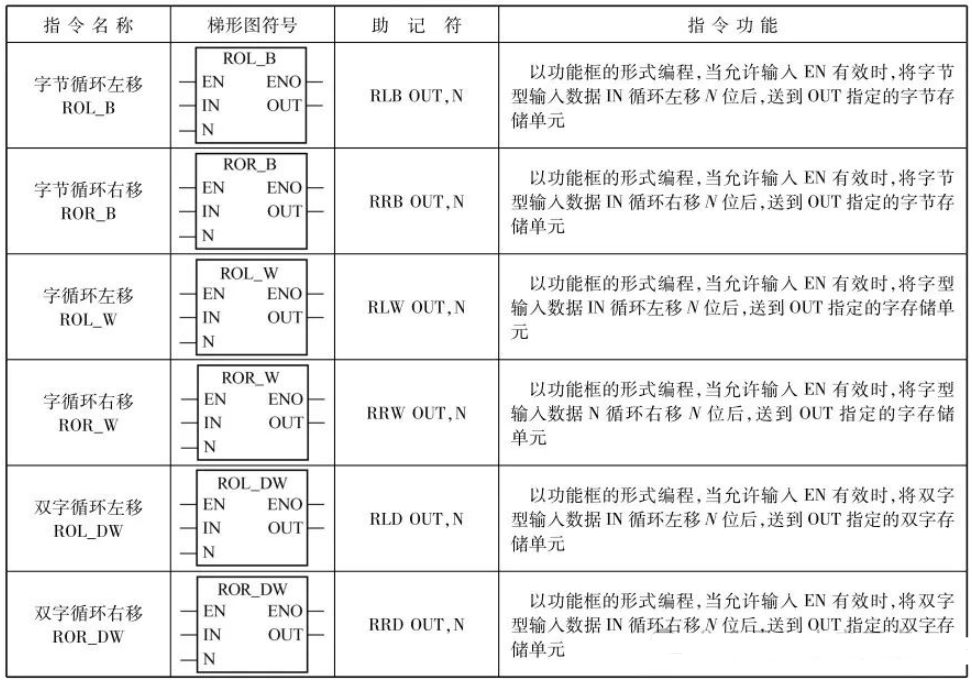
什么是PLC循环移位指令 PLC循环移位的特点
什么是RNN (循环神经网络)?

arduino如何停止loop循环
arduino中while循环怎么跳出
循环指令loop规定循环次数
g81循环指令参数
labview精确控制循环时间
为什么HashMap会产生死循环呢?






 工商网监
工商网监
评论