 怎样制作一个由树莓派控制的剪叉式升降机
怎样制作一个由树莓派控制的剪叉式升降机
第1步:需要哪些东西

这个项目你需要一堆东西。如果你像我一样享受3D打印和构建东西,你可能已经拥有了大部分内容。确保你看看麦克马斯特卡尔的螺丝,当你购买它们的价格要便宜得多。您也可以从亚马逊订购套装。
需要的工具:
5.5毫米套筒扳手
2.5,2.0 mm hex驱动器值得拥有一套好的。
钻1/8“钻头我有这个钻头套装。
石墨润滑油
烙铁
焊料我认为焊接时我的焊接质量很差。
Sander(最好的砂光机) (世界上)
3D打印机我有XYZ Da Vinci Pro 1.0并且对它感到很兴奋。
机械部件:
合金钢插座或按钮头螺钉:请务必订购超过您需要的订单,因为我的计数可能已关闭!
(1)M3 x 10mm按钮头
(2)M3 x 12mm按钮头
(4)M3 x 10mm
(6)M3 x 12mm
(4)M3 x 16mm
(34)M3 x 20mm
(2)M3 x 25mm按钮头
(8)M3 x 30mm
(4)M3 x 45mm
(30)M3尼龙锁紧螺母
(54)M3垫圈
(48)3x6x2mm轴承在没有这些轴承的情况下工作,但确保更好。
(1)8x22x7mm轴承你也可以偷一个来自烦躁的微调器
3D印刷零件您可以从正面零件下载这些零件
(2)梁20mm x 20mm x 190mm
(1)限制器
(1)电机螺旋安装
(1)平台导轨
(1)平台
(1)后螺旋安装
(1)滑块
(1)剪式内底
( 4)剪刀内部
(1套)剪式外部
(1)伺服安装前部
(1)伺服安装后部
(1套)垫片
(2)5/16“螺母(Home Depot)
(1)5/16”x 5 - 1/2“螺栓(Home Depot)如果您愿意,也可以使用5/16”螺纹杆。
电气:
Raspberry Pi,我使用3型号B +任何Pi版本都可以使用这是一个不错的套件。
(1)Lewansoul LX-16a串行总线伺服,我的价格低于20.00美元(我需要搜索亚马逊或Banggood,链接不断变化)
(1)Lewansoul串行总线调试板。
(1)金属伺服喇叭
(2)限位开关https://amzn.to/2SsZBGj
硅胶线这些很棒,你可以用指甲剥掉它们(如果你不咬指甲)
电池供电伺服,我正在使用宜家的4节AA镍氢电池。
消耗品:
Q-Tips
超细纤维布
创可贴(希望不是)
第2步:基础
分阶段构建它更容易,让我们将从基地开始。然后我们将转向电子设备,最后组装剪刀。它印有不同的颜色,因为我使用的是PLA和PETG。
如果您还没有这样做,请打印出您的零件。我的打印机花了几天时间完成所有部件的打印。
你可以在这里找到这些部件:https://www.thingiverse.com/thing:3325636
花点时间,不要过度拧紧M3螺丝,塑料条很容易。如果剥开孔,您可能需要重新打印部件或使用一些大猩猩胶(棕色的东西)并用牙签轻轻涂在孔内,并在使用前将其完全干燥过夜。
将洗衣机“漂亮的一面”放好,看起来更好。
慢慢来,或者你可能需要重新打印。
打印剪刀部分最后,因为它是构建的最后一部分。
我们走了。
A。开始打印所有部件(参见零件清单。
B。将零件磨平,修剪出令人讨厌的东西。
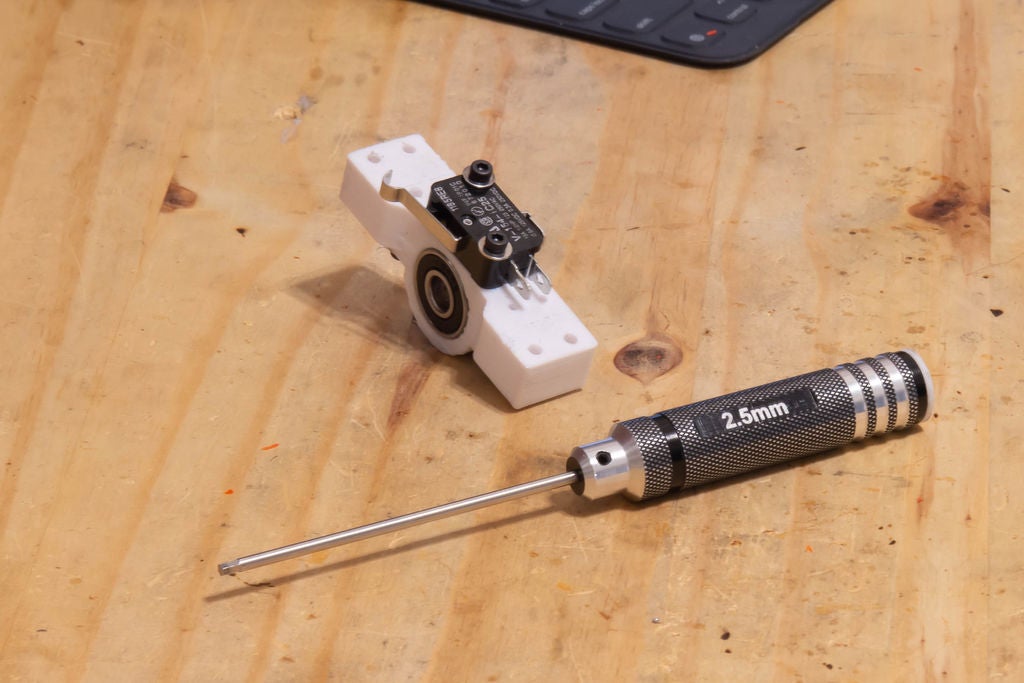
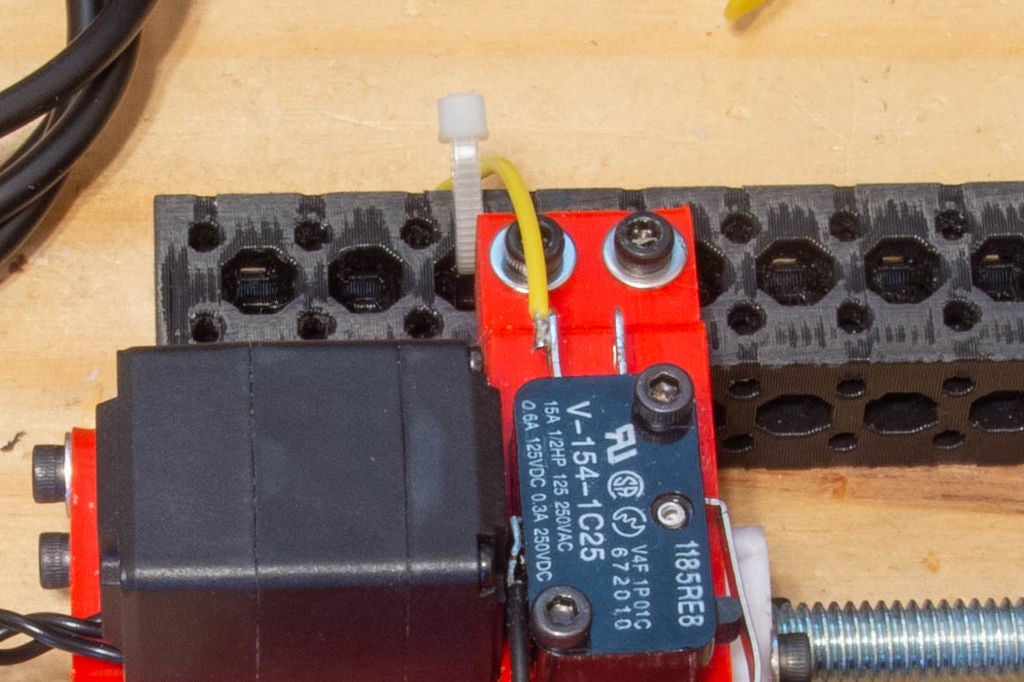
步骤3:安装限位开关。
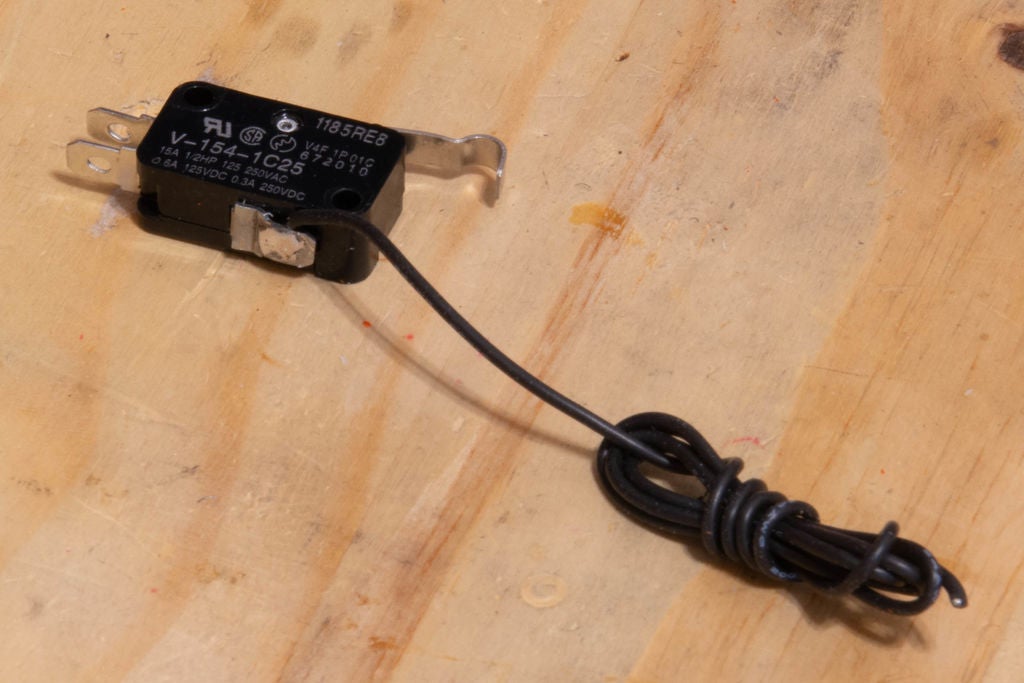
A。弯曲公共引线(侧面已弯曲的引线)开关),所以它齐平并焊接限位开关上的电线。如果忘记此步骤,则没有足够的间隙来安装伺服。
注意:这是在构建的这一部分需要进行的唯一焊接。
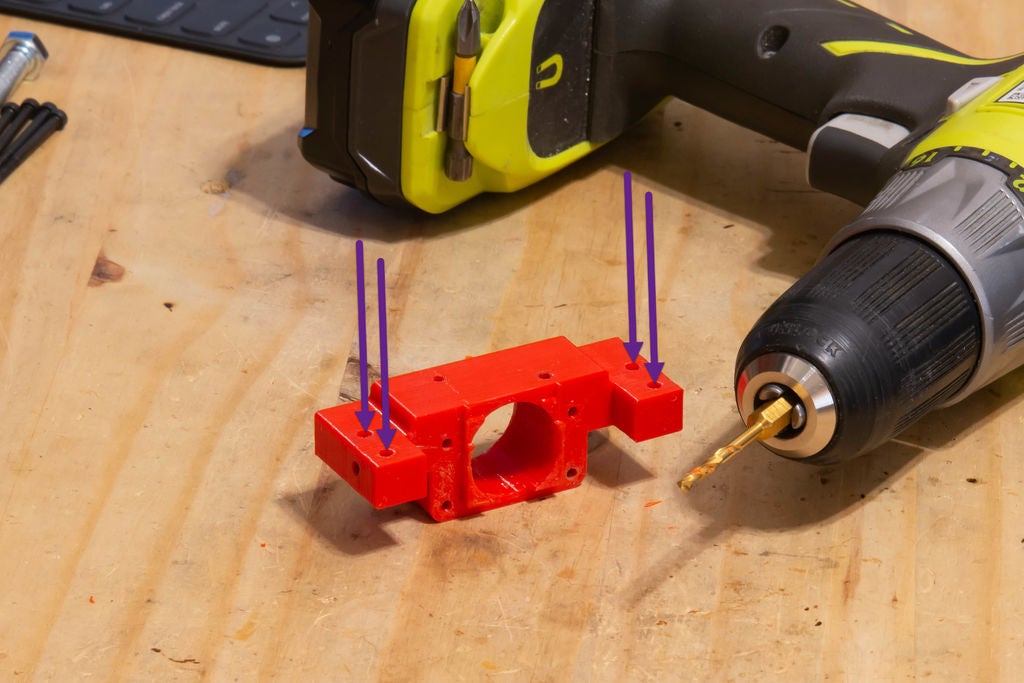
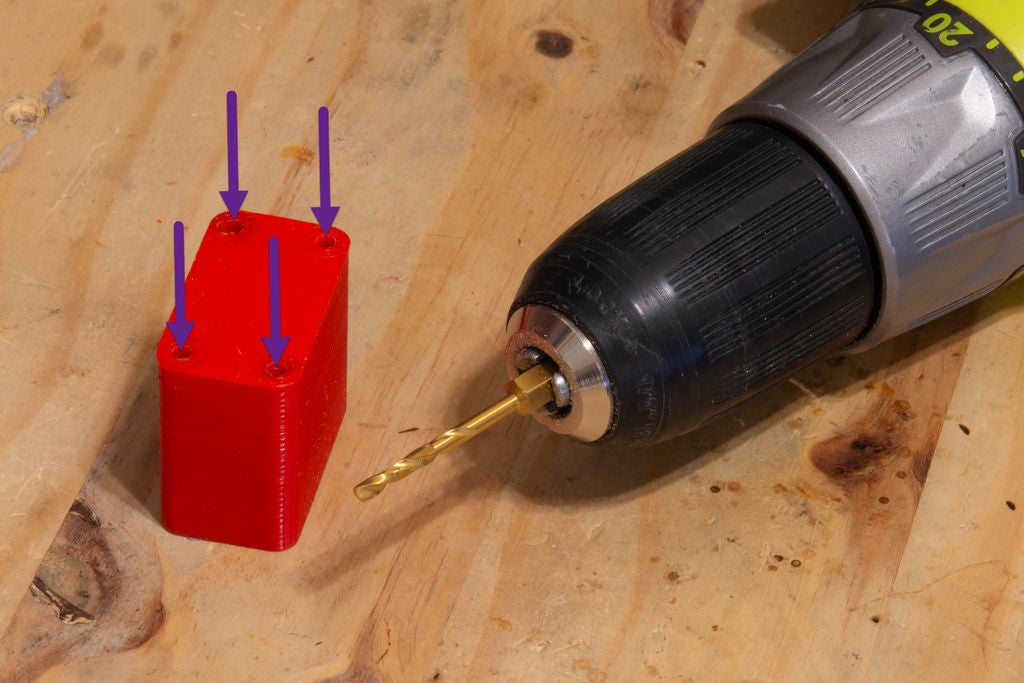
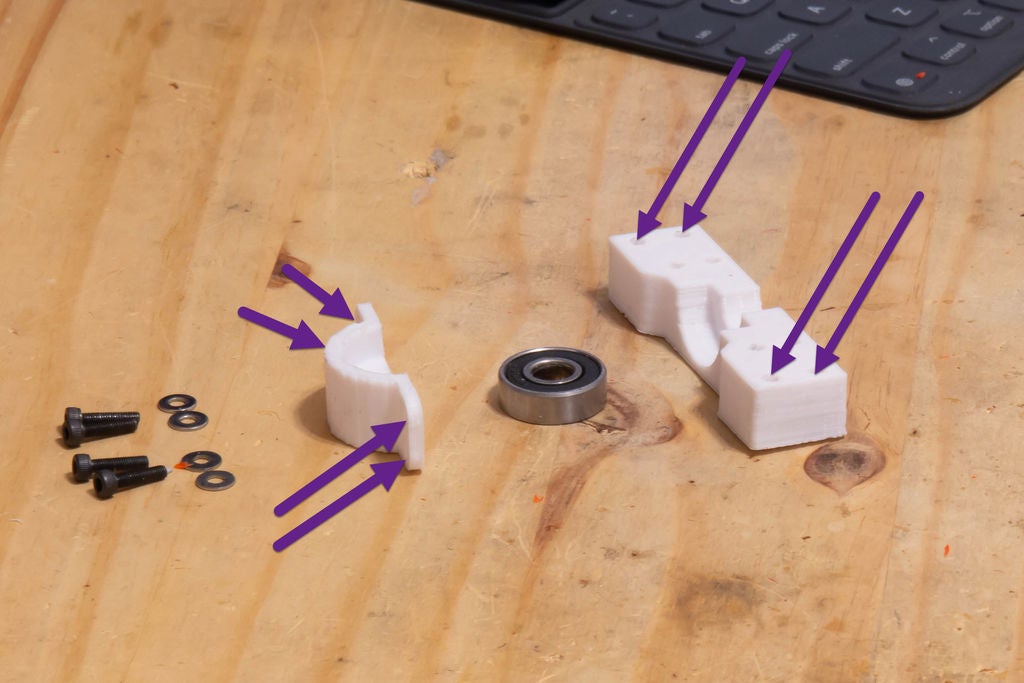
B。钻通(4)1/8“孔伺服安装座,请参见上图中的紫色箭头。钻孔允许螺栓自由通过并稍后将伺服安装座拧紧到导轨上。
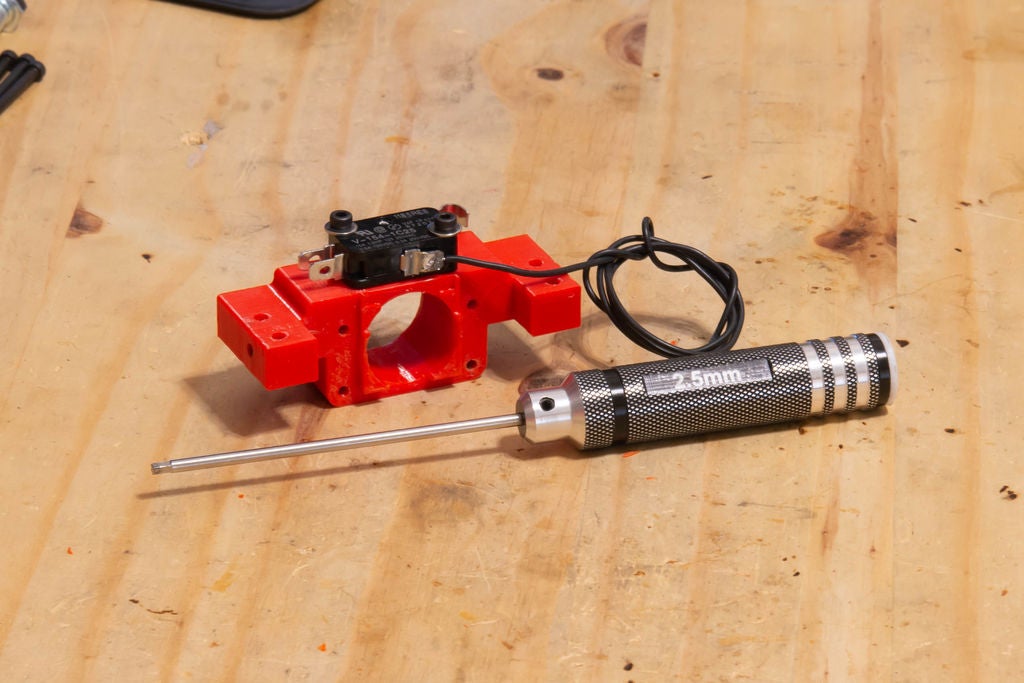
C。最后,如图所示将限位开关安装到伺服安装座上(2) M3 x 16mm螺钉。
步骤4:下部电机螺钉安装




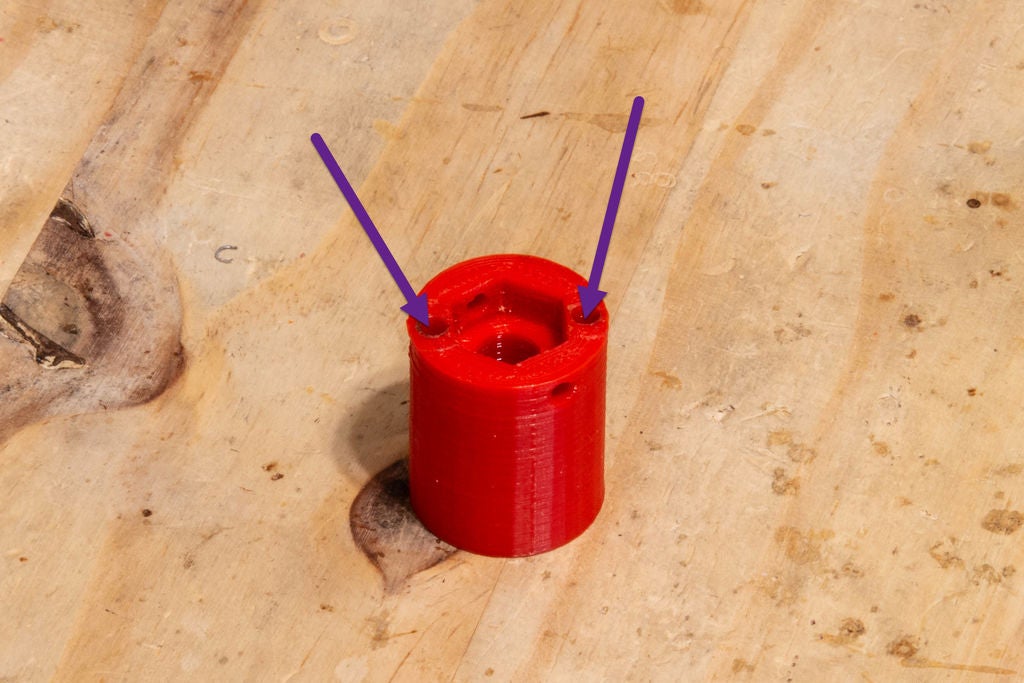
A。在下部电机螺丝安装座中钻出(5)1/8“孔,请参见上图中的紫色箭头。
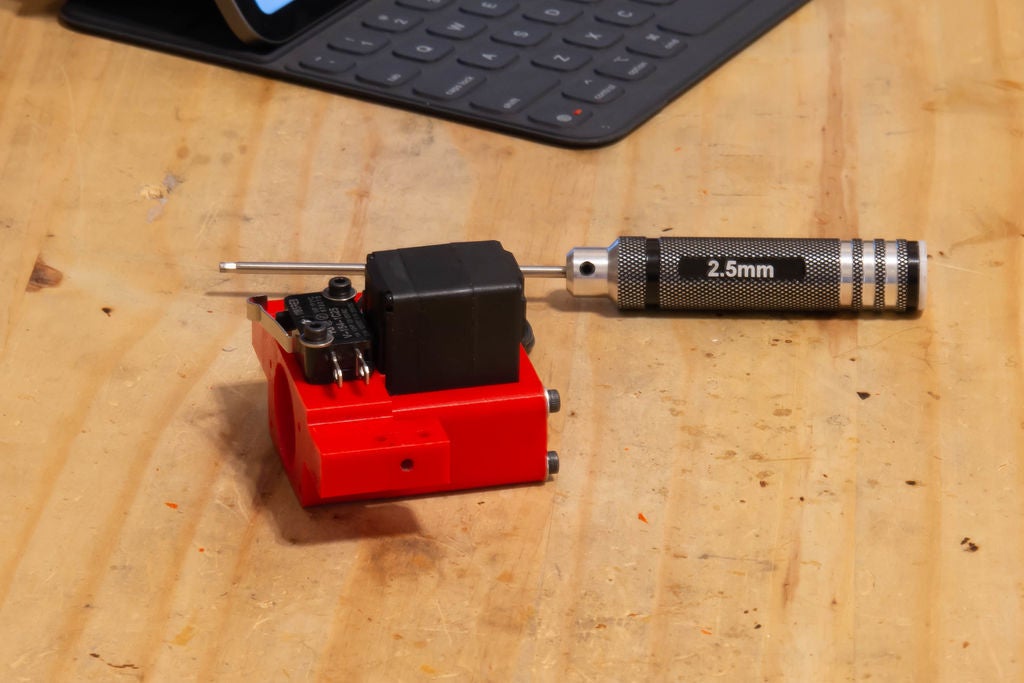
B。然后使用(4)M3 x 12mm按钮头螺钉将下部Moto螺丝安装座连接到金属伺服喇叭。
C。最后,安装下部电机螺钉使用(1)M3 x 10 mm螺钉安装到伺服系统。
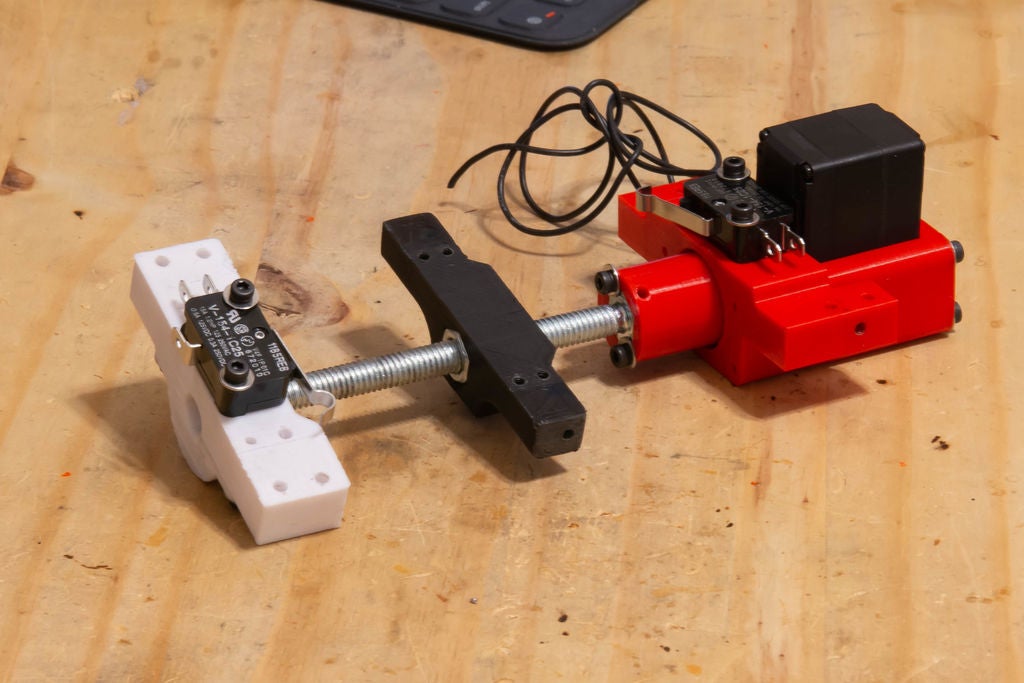
步骤5:安装伺服和螺栓

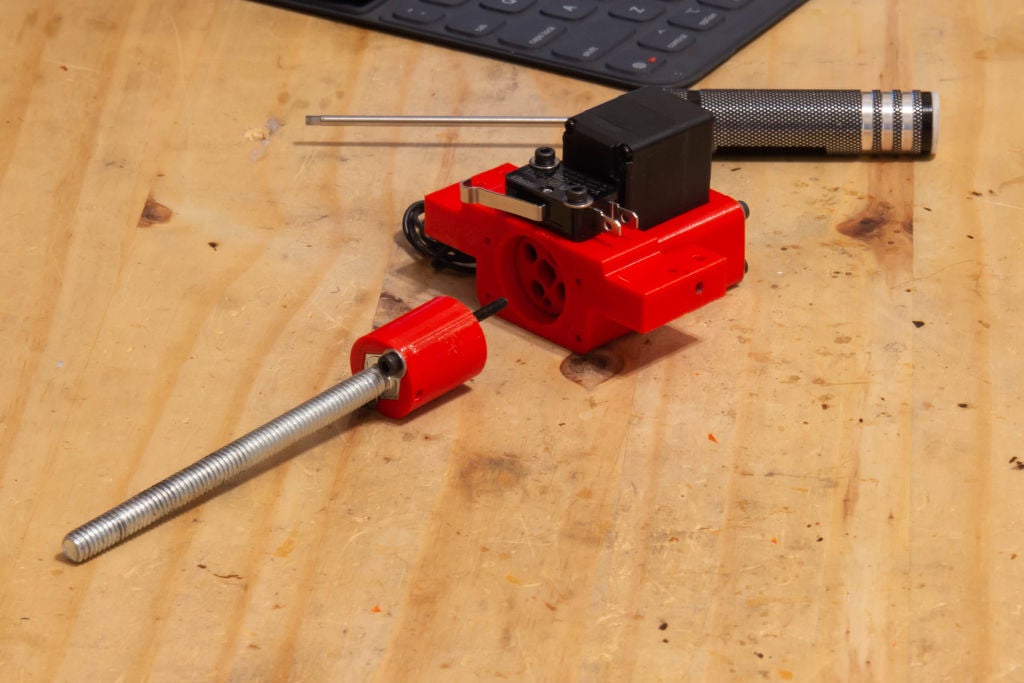
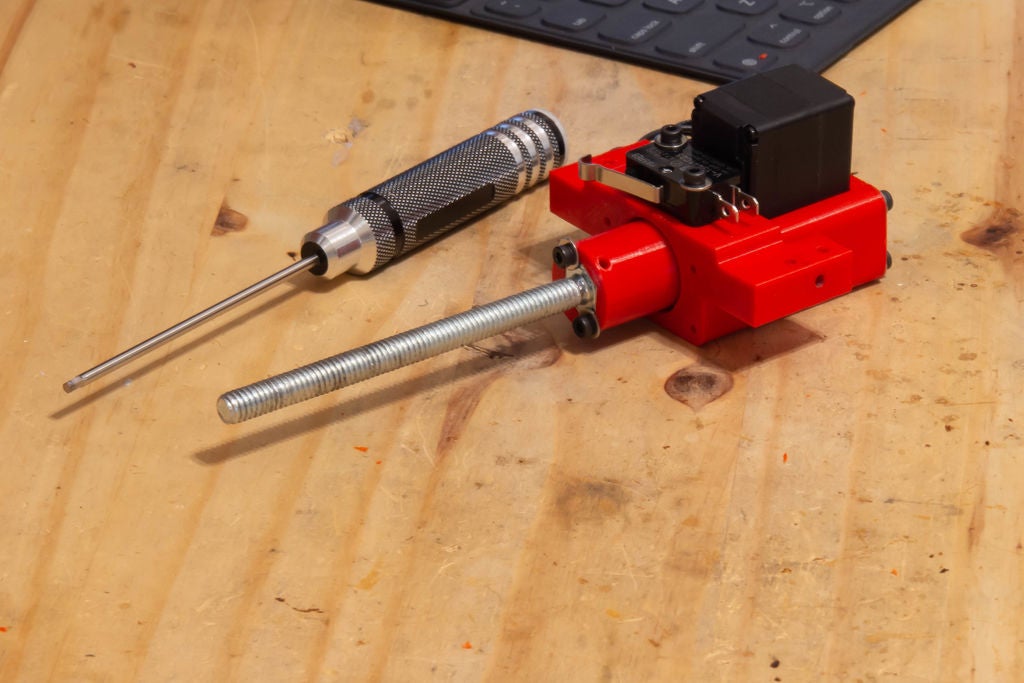
A。钻取(4)1/8“后伺服安装座上的孔如上图所示,紫色箭头表示。
B。钻穿(2)1/8“孔螺丝安装在上面照片中的紫色箭头所示。注意:根据您打印的版本,您的颜色可能会更短。
C。将伺服器安装到伺服安装座上。你可能需要修剪一下以获得合适的效果。它会有点松散。然后使用(4)M3 x 45mm螺钉和垫圈将后伺服安装到前伺服安装座。伺服器会左右摇摆而不是来回摇摆。
D。将5/16“x 5 - 1/2”螺栓插入上部螺钉安装座;它应该是一个舒适的合身。您可能需要稍微修剪开口以使其适合。
E。使用(2)M3 x 16mm螺栓和垫圈连接到螺丝安装座的两半。
F。您的组件应该看起来像是最后一张照片。
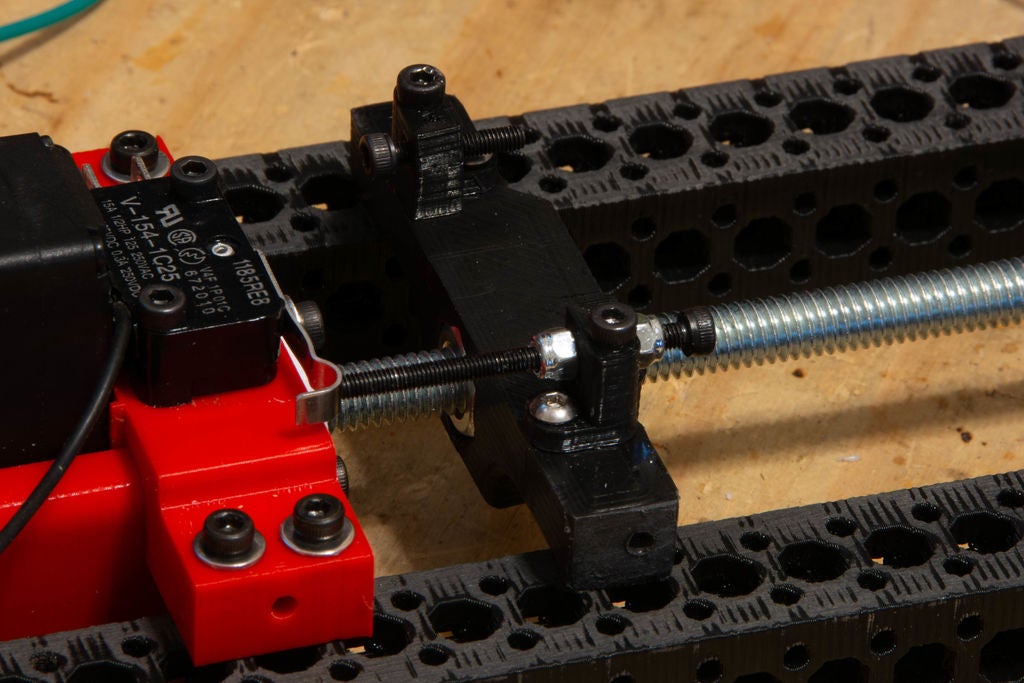
第6步:滑块和后部装配

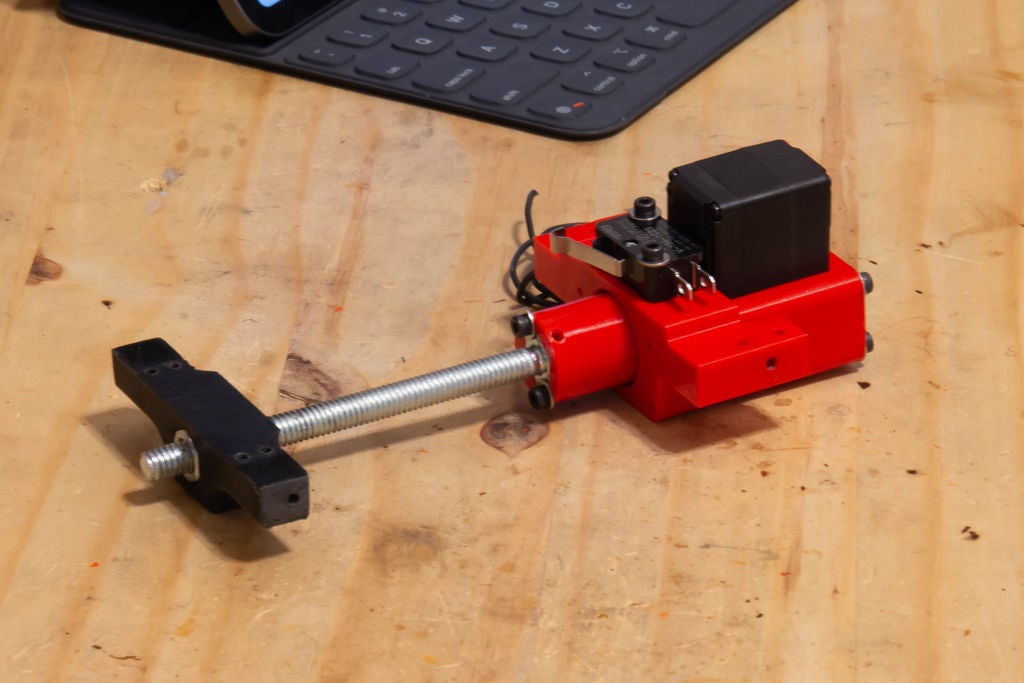
现在是时候安装滑块和后螺钉安装座。
A。插入(2)5/16螺栓进入滑块。螺栓前后应有一点间隙。没有游隙,螺钉将在运动时结合。
B。将5/16螺栓上的滑块拧紧几英寸。
C。如图中紫色箭头所示,在后部螺钉安装轴承盖上钻出(4)1/8“孔。
D。将8mm x 22mm x 7mm轴承插入后螺钉安装座,并将轴承盖安装在(4)M3 x 12mm螺栓和垫圈上。
E。安装(1)带(2)M3 x 16mm螺栓的限位开关
F。将5/16“螺栓滑入轴承。注意:这里会有一堆游戏。您需要使用一块电工胶带或热缩管来减少游隙量。测量下一步所需的量。
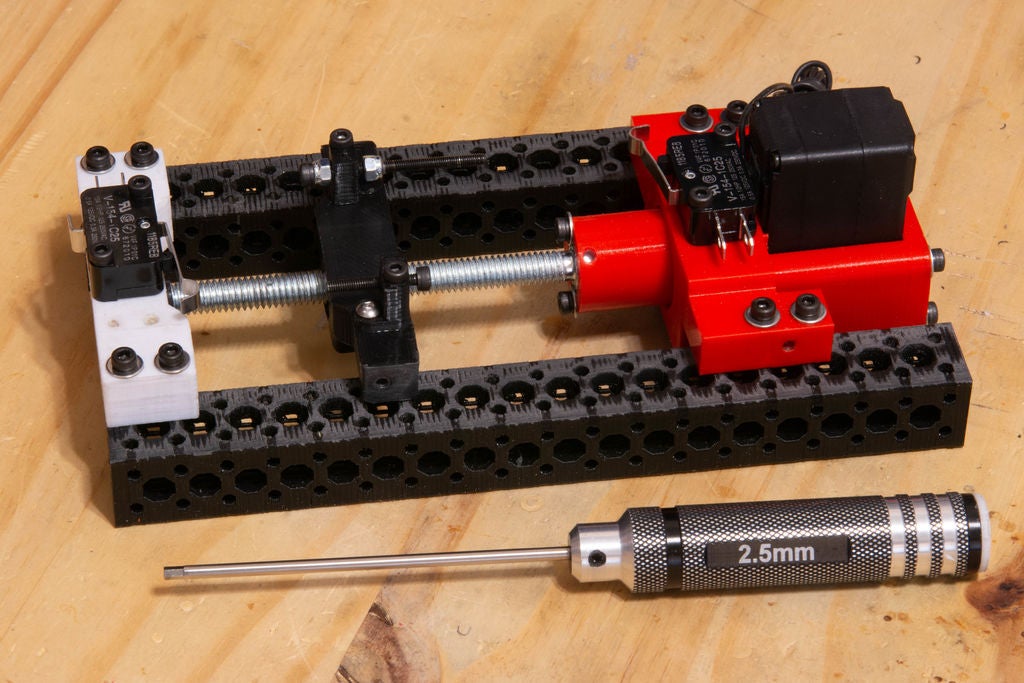
步骤7:完成下部装配。
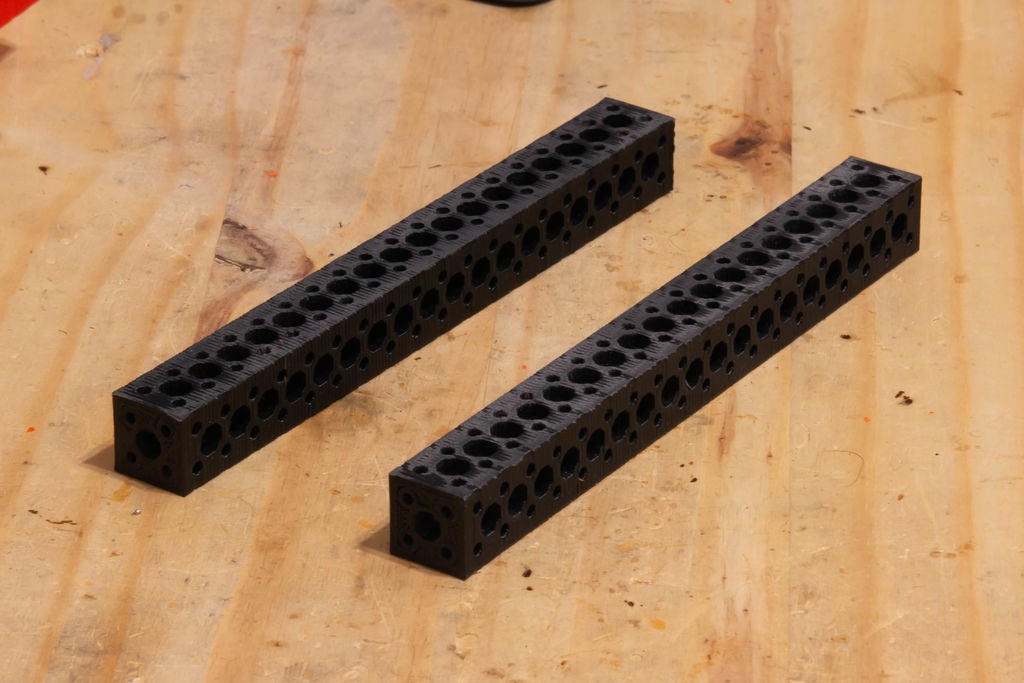
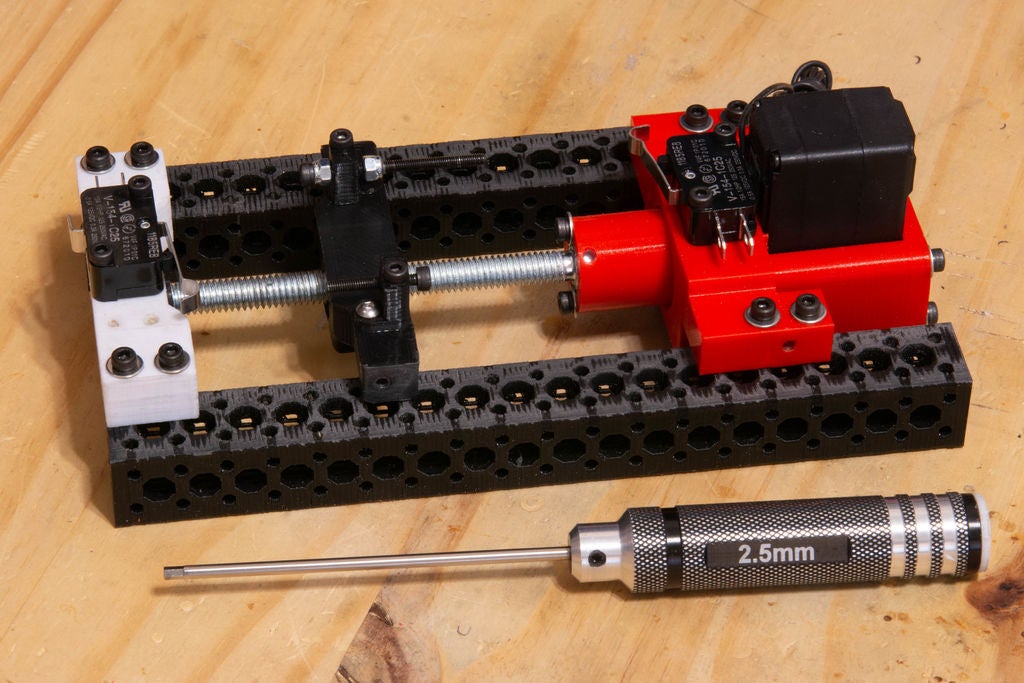
现在您已完成电动组件,是时候将其安装到导轨上了。铁轨是The Great Mojave Rover Project的一部分,可能看起来有点矫枉过正。我计划将剪叉式升降机整合到火星车中,导轨设计允许我稍后这样做。
A。每个导轨的一侧平滑。您不需要打磨一堆,只需要将凸起弄平。
B。首先使用(4)M3 x 30mm螺栓拧紧后螺钉安装座和垫圈。这应该位于导轨末端齐平。
C。将5/16“螺栓插入轴承,将伺服安装座插入第4个孔中(留空3个)测量胶带或热收缩的位置。连接胶带或热缩并重新安装组件。
D。将伺服组件拧到导轨上使用(4)M3 x 30mm螺栓和垫圈的第4个孔(离开3个空)注意您的伺服安装座可能有点不同,我重新设计了更长的5/16“螺栓。请仍然留空3洞。
现在您应准备好电动组件,以便连接限位开关螺丝,并使Raspberry Pi来回移动滑块。
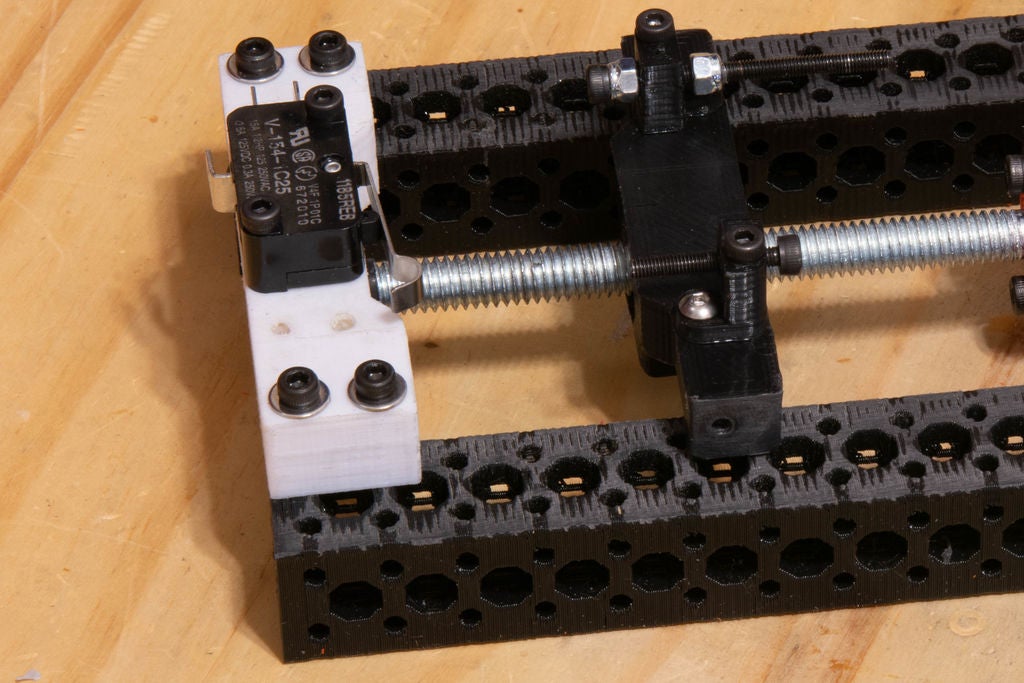
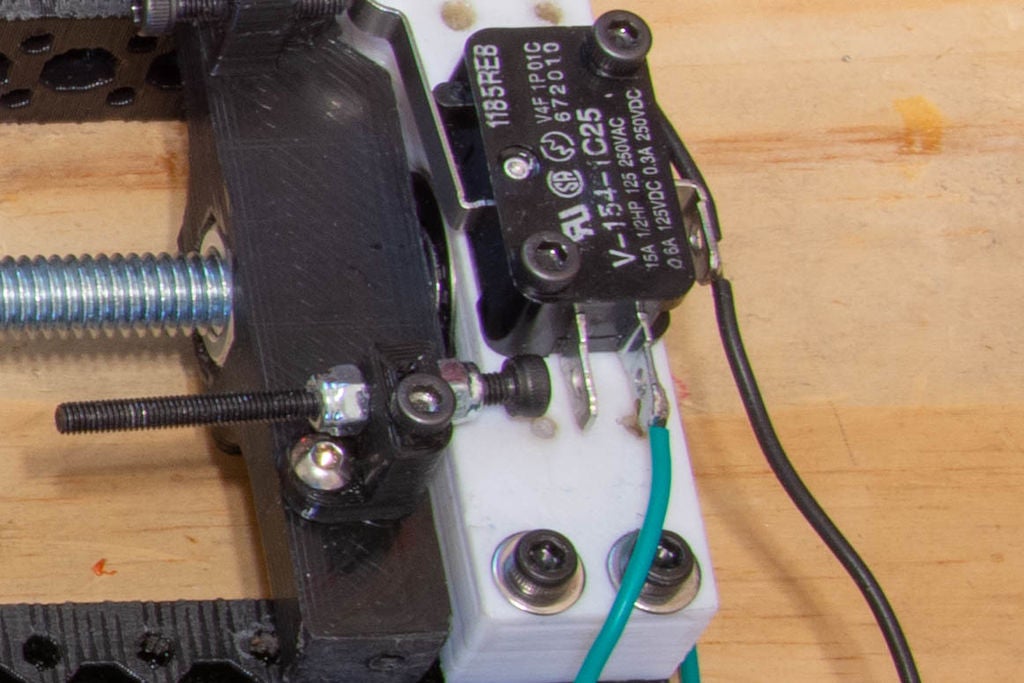
步骤8:限位开关调节器。


两个限位开关调节器将启动您希望滑块停止的开关。您需要在接合螺栓从上方通过的两个位置使用按钮头螺钉进行间隙。此外,两个限位开关调节器3D打印部件都是相同的。
A。钻(2)1/8“在每个限位开关上插入孔。
B。将按钮头螺钉插入接合器中。
C。在每个接合器中插入限位螺钉,(1) M3 x 20mm,另一个是(1)M3 x 40mm。
D。将限位开关接合器安装到滑块上。使用伺服侧的较长螺钉(40mm)
注意:我将锁定螺母连接到我的长接合器上,因为我剥去了孔。
步骤9:连接Pi。
软件因为这很简单,它只是简单地升高和降低升力。您可以编辑代码以执行任何您想要的操作,玩得开心。
我假设您已经知道如何在Raspberry Pi上加载操作系统以及如何编写简单的Python 3程序, Hello World示例就可以了。
这是一个很好的起点,但是有很多资源可以开始使用。
设置你的Pi。
运行你的第一个Pyhon程序。
步骤10:连接你的下部装配。
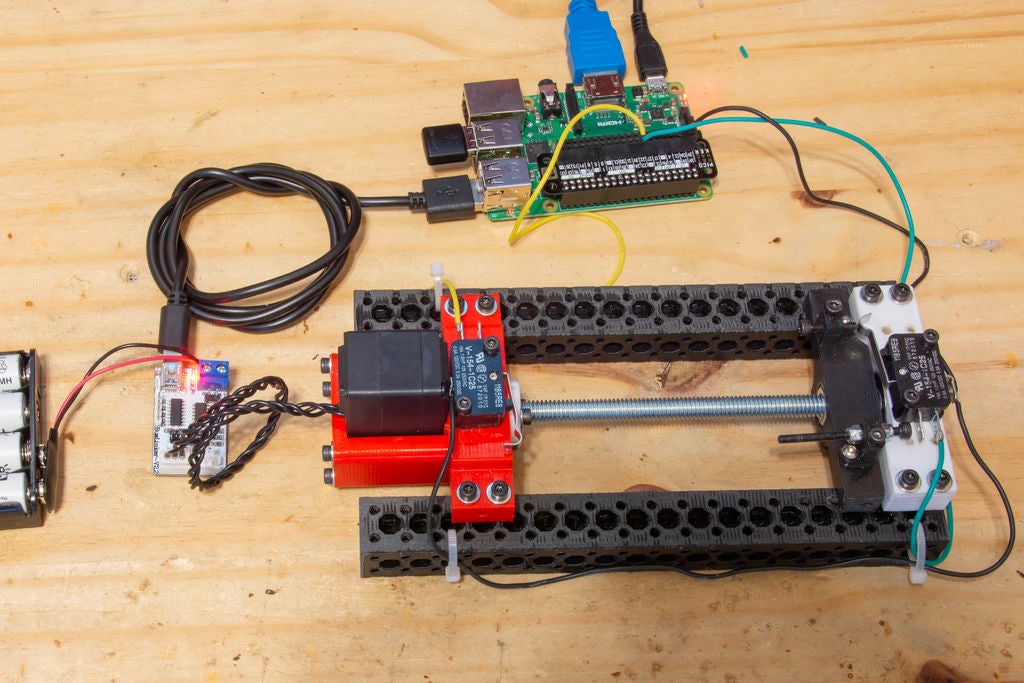

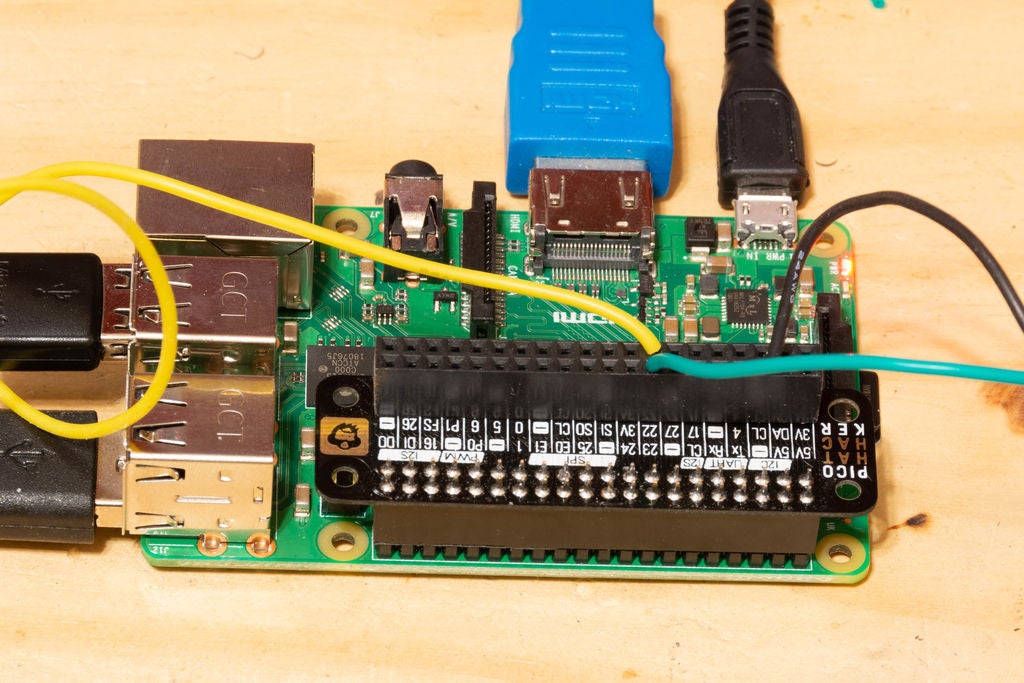
对于像这样的小项目,我更喜欢在面包板上使用Pimoroni Pico HAT黑客板。你可以使用任何东西,但我喜欢这个小设备。我在HAT两侧的40针母头上焊接,这允许我在任何一侧使用(见第二张照片)。
警告:我已经炸毁了一对Raspberry Pis这样做Pi已启动。确保红色为+且黑色为接地或 - ,伺服调试板内置无保护。
A. 将黑线连接到每台交换机上的公共连接Pi的地面。 (第6针)
B 。将绿线连接到下限开关(参见第1张照片),然后连接到GPIO 23(引脚16)
C。将黄线连接到上限开关(参见第1张照片)然后转到GPIO 22(针脚15)
E. 使用随LX-16A伺服提供的电缆将伺服连接到伺服调试板
F. 连接电源到伺服调试板。请勿使用Pi为伺服板供电,请使用外接电池。我使用了4节AA电池。
步骤11:加载并运行Python程序
我再次假设您知道如何启动终端并知道如何启动Python3程序。
A。启动终端
B. 我们需要克隆几个库GitHub上。第一个是Ethan Lipson的PyLX16A,另一个是来自BIMThoughts‘GitHub的Scissor Lift代码
cd
git clone https://github.com/swimingduck/PyLX-16A.git
git clone https://github.com/BIMThoughts/ScissorLift.git
cd ScissorLift
cp 。./PyLX-16A/lx16a.py 。
上面的命令执行以下操作:
cd 将目录更改为主目录
git clone 将代码文件从GitHub下载到存储库名称的文件夹中。
cd ScissorLift 将文件夹更改为ScissorLift代码所在的位置
cp 。./PyLX-16A/ lx16a.py 。复制伺服命令所需的库。
C 即可。您应将Pi连接到电机组件,并将调试板连接到USB和伺服。
D。键入以下内容以运行开关测试。
cd
cd ScissorLift
python3 SwitchTest.py
程序将开始说“停机”。
将开关从伺服器进一步接合,程序将以“上升”响应。现在使用最接近伺服的开关,程序将停止。
故障排除:
如果失败请仔细检查接线,我犯了错误第一次将黄线焊接到错误的开关连接,并在接合第一个开关后停止。
步骤12:电机测试
现在开关工作,是时候测试电机组件。
您已经下载了代码。让我们开始。
A。确保您的伺服系统连接到调试板,任何插头都能正常工作。
乙即可。从终端输入以下内容:
cd
cd ScissorLift
python3 MotorTest.py
您的滑块将开始移动,当首先朝向伺服时,然后当限位开关接合时,它将向另一个方向移动并在到达另一个限位开关时停止。
如果你听到它开始绑定,拔掉来自调试板的伺服,然后按ctrl-c停止程序并确定它绑定的原因。
故障排除:
在幻灯片中间绑定:
a。螺母不会在滑块内自由移动。
b。螺钉安装座不居中。
c。轴承不是自由的。
滑动结束时的绑定是由于开关未接线或需要调整啮合螺钉引起的。
d。按ctrl-c后伺服继续移动,拔掉伺服电线到调试板。这将重置伺服。
步骤13:剪刀装配





现在我们终于可以组装剪刀了。剪刀有三个主要部件。
Scissor Outer(第一张照片,看起来像蓝色冰棍棒)
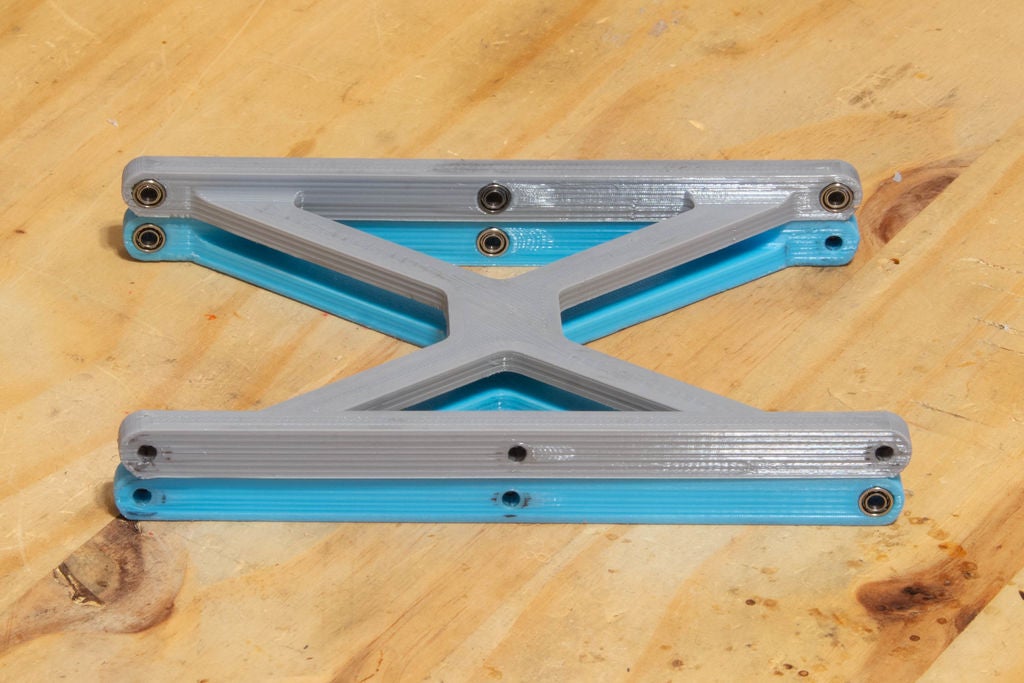
Scissor Inner(第二张照片灰色)
剪刀内底(第二张照片蓝色)
Scissor Inner和Scissor Inner Bottom之间的区别在于轴承的位置,如照片右侧所示。 观看视频更容易在那里解释。
A。将轴承插入每个Scissor件中。您可能需要使用螺栓,垫圈和螺母将垫圈压入槽中。如果您打破了插槽,可以使用胶水来修复它。
B 。使用石墨润滑剂和棉签,涂在剪刀的非承重面上。
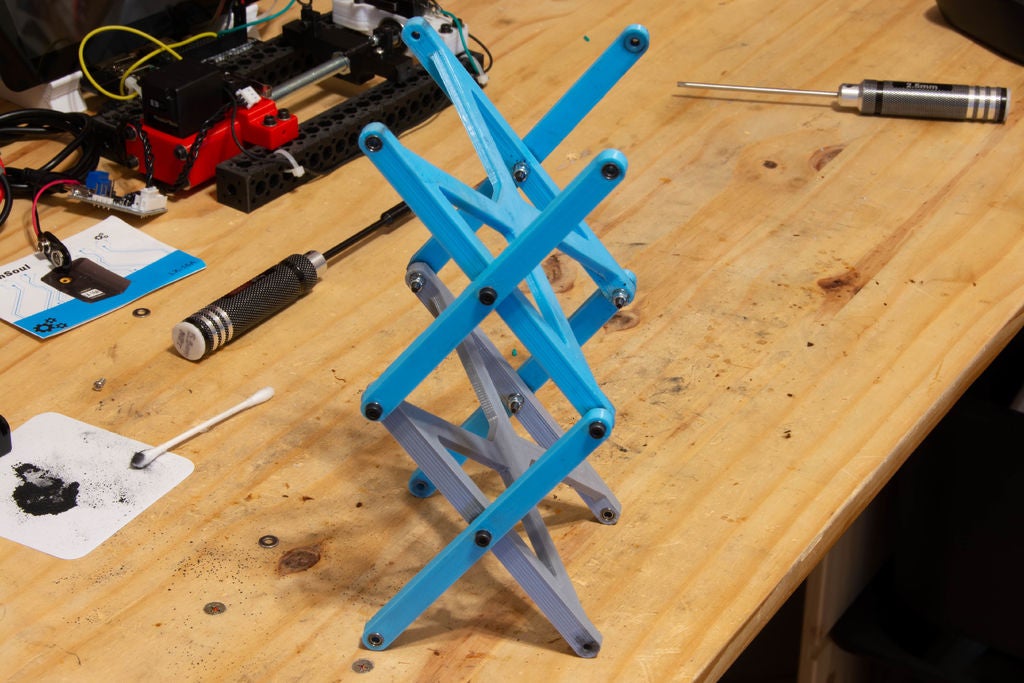
C 。使用M3 x 20mm螺钉,垫圈和锁紧螺母。从内底开始将剪刀外部连接到中间连接。 (见图)
D 。将另一个外剪刀连接到底部剪刀的末端,其中轴承位于内侧。然后将另一个内部剪刀连接到中间。
E。继续连接内外剪刀,直到用完剪刀。
步骤14 :将剪刀安装到底座上。

使用(2)M3 x 20mm,带(2)个垫圈和3d打印空间将剪刀组件连接到伺服支架上基座。
使用(2)M3 x 12mm将剪刀组件连接到滑块。
除了平台,你有一个工作剪叉式升降机。
步骤15:剪刀运行测试
连接你的剪叉式升降机如果你还没有这样做,请回到Raspberry Pi。
A。从Raspberry Pi上的终端再次运行MotorTest.py并看到你的剪叉式升降机。
继续关注:
任何绑定
限制啮合螺钉的间隙
如果绑定或发生某些事情,请先从调试板上拔下伺服电源。
步骤16:附加平台


希望通过现在你想出了如何放置平台。
A。确定你想要平台的最终目的。
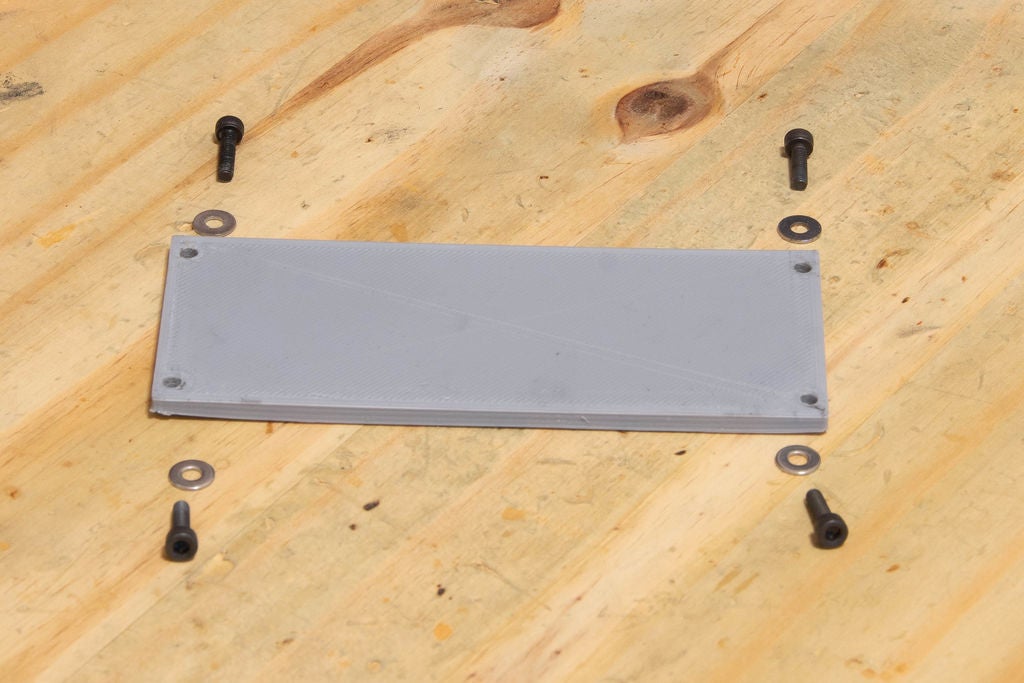
B. 将平台导轨安装到剪刀顶部的外侧。在需要垫片的一侧,您需要一个M3 x 25mm螺钉和2个垫圈。另一方面,使用带有1个垫圈和1个锁紧螺母的M3 x 20mm螺钉。
C。使用M3 x 12mm螺钉和垫圈将平台顶部连接到导轨上。
-
升降机
+关注
关注
0文章
28浏览量
10665 -
树莓派
+关注
关注
116文章
1707浏览量
105615
发布评论请先 登录
相关推荐
树莓派与Arduino的区别是什么
树莓派gpio有什么用,树莓派gpio接口及编程方法
什么是树莓派?树莓派是什么架构的

树莓派和单片机的优缺点是什么
树莓派的功能用途是什么
树莓派和arm开发板的区别
微型升降机丝杆选型的综合考量!

PLC升降机数据采集远程监控系统解决方案
施工升降机AI数人数识别摄像机






 工商网监
工商网监
评论