 3D打印机器人手臂的制作教程
3D打印机器人手臂的制作教程
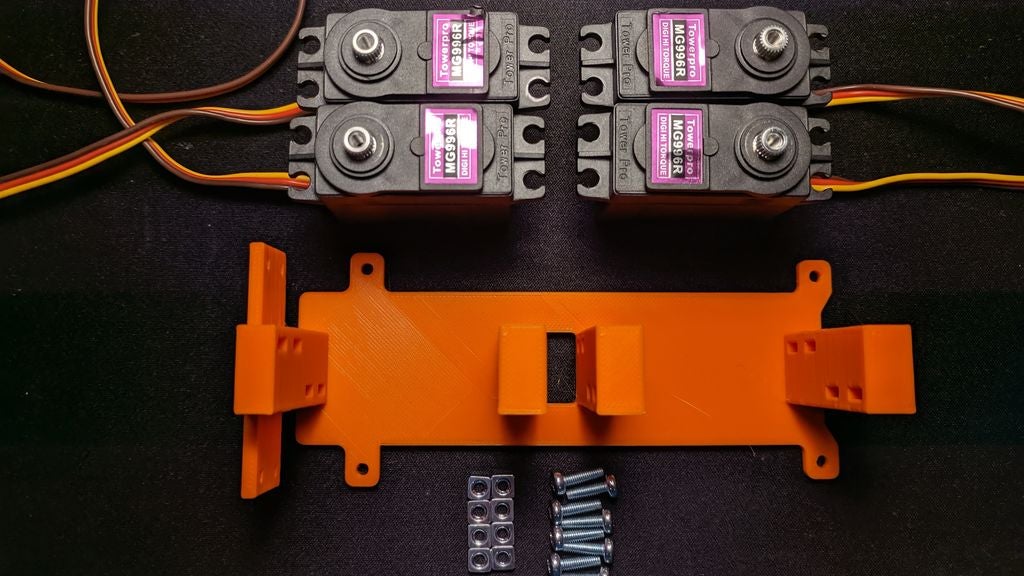
耗材:
以下产品是此Instructable中使用的项目。您可能会发现不同的变化,因为它们都是标准零件和电子元件。请注意,一些3D打印部件已针对这些项目量身定制,因此您的里程可能会有所不同。我已经在Thingiverse页面上包含了Fusion360文件,以防您需要进行微调。
4x Servo Horn 25T
4x TowerPro MG996R 10kg伺服电话
8x 8mm M3沉头螺钉 - 您可以使用较短的螺钉,但我使用8毫米长的螺钉,并且在前臂部件内部没有间隙问题。
12x 10mm M3头螺钉。在这个项目中可以使用20,但不是必需的。
12x M3方形螺母5.5x1.8mm
3毫米弹性尼龙/防震绳(5米)
MG90S微伺服带伺服喇叭
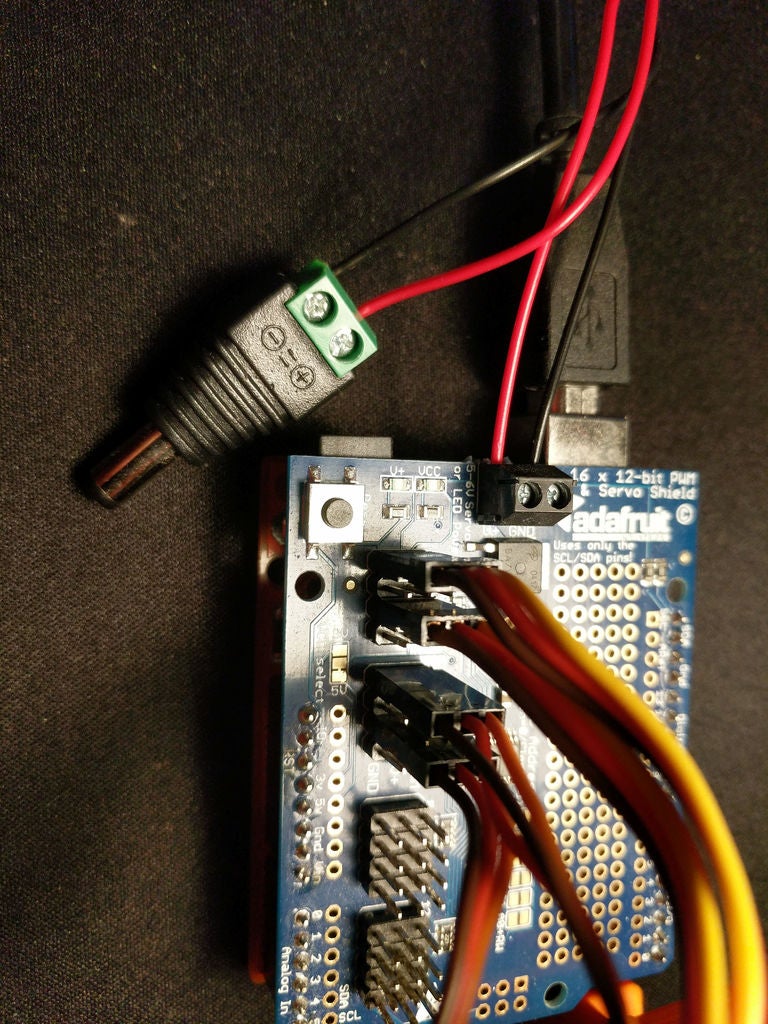
PWM/伺服控制器板
电池/电源~5 -6V
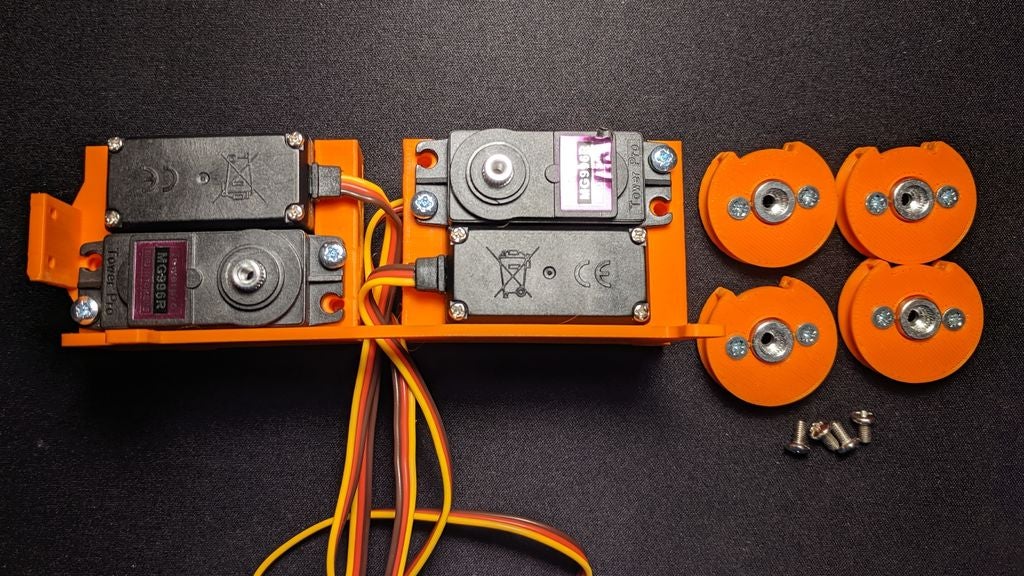
步骤1:准备伺服滑轮



《准备以下内容:
4x伺服滑轮(3D打印)
4x伺服喇叭
8x沉头M3螺丝
将伺服喇叭穿过伺服滑轮上的孔,使齿形槽略微突出滑轮底座。
将两个埋头螺钉拧入滑轮和喇叭的孔中。
重复所有4个滑轮。
步骤2:保护舵机

准备以下内容:
伺服支架(3D打印)
4x TowerPro MG996R 10kg伺服电机
8x(最小)10mm M3螺丝
8x(最小)M3方形螺母
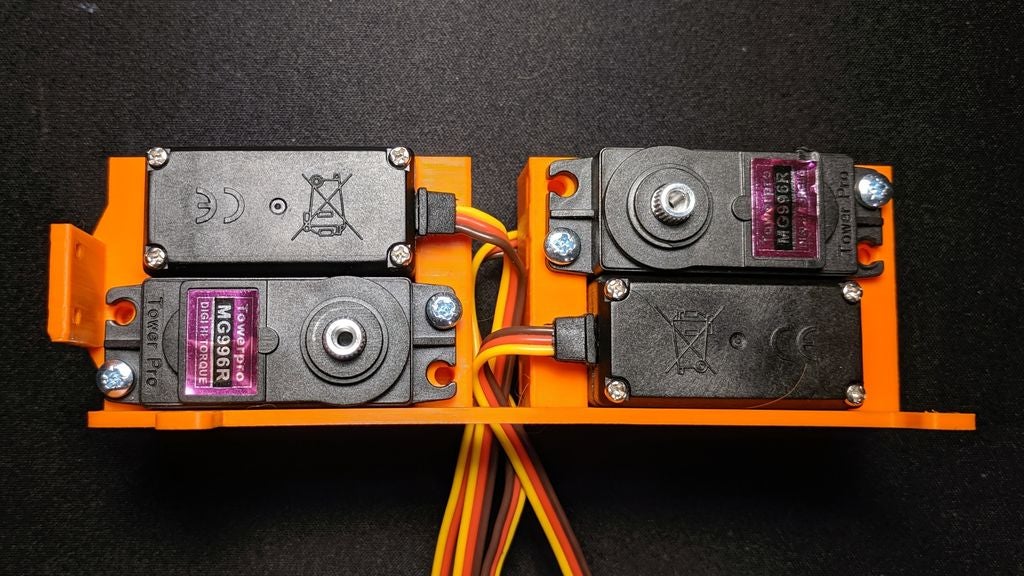
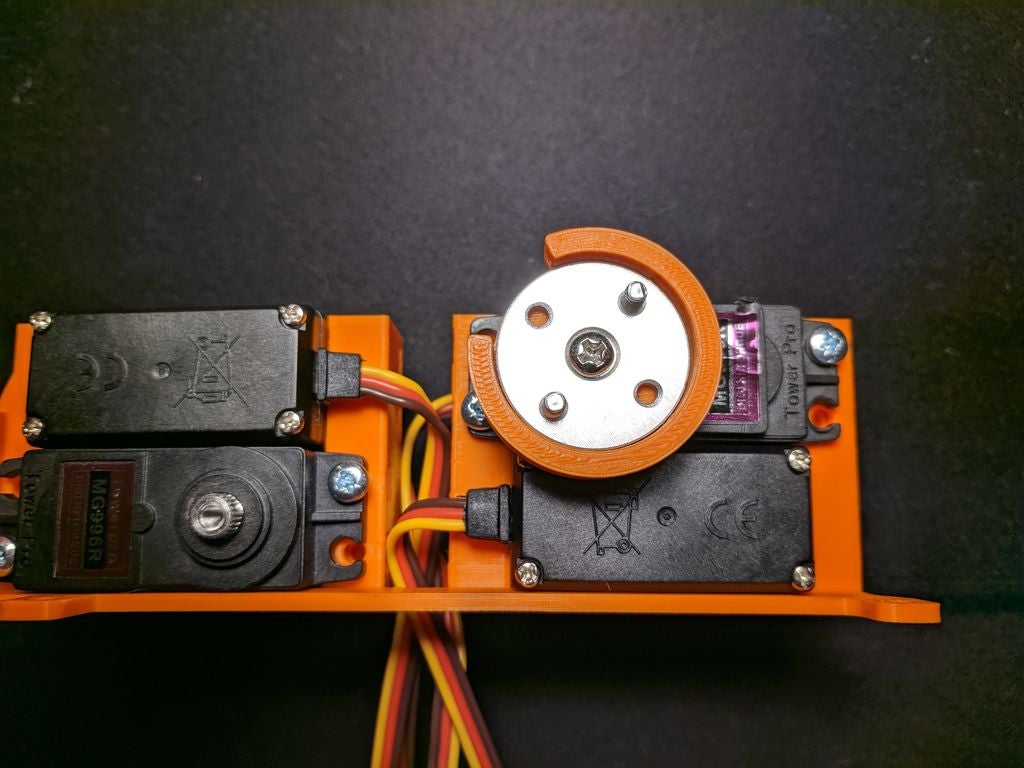
将方形螺母插入陷阱。您可能需要仔细定位它们以与伺服孔对齐。
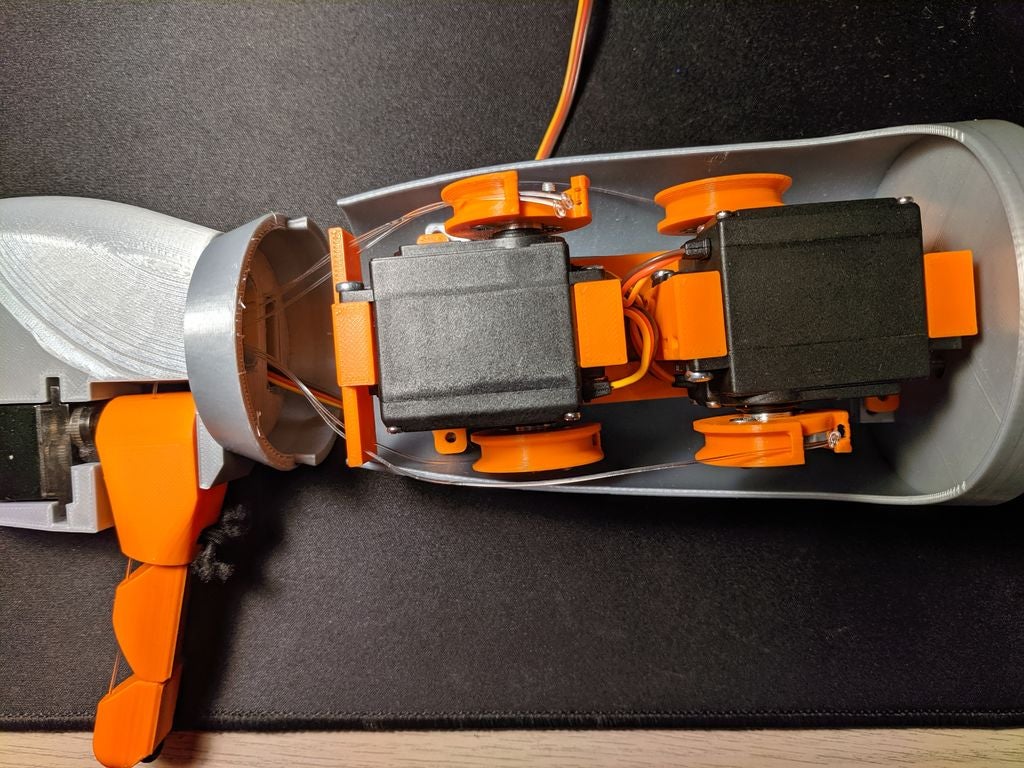
使用螺钉将伺服器固定到支架上。小心不要过度拧紧,只需将电机固定到位即可。您可以选择使用支架上的所有孔,但这不是必需的。在图片中,我每个伺服只使用了两个。
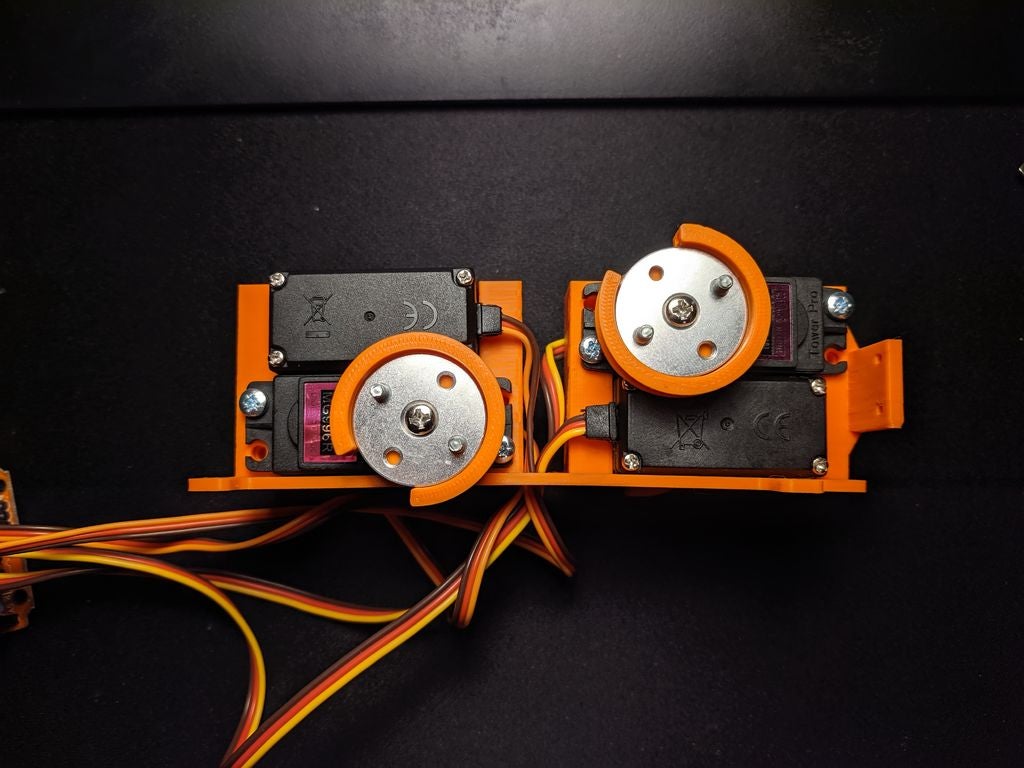
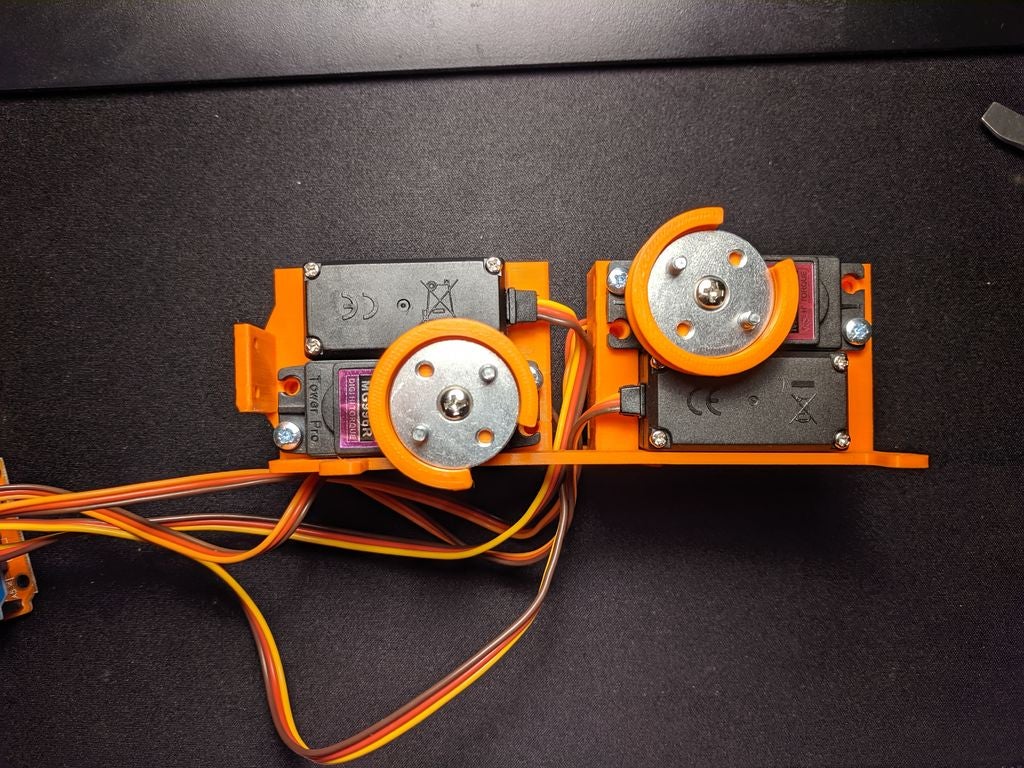
对所有4个伺服器重复。方向很重要:确保25T齿轮轴更靠近支架的中心支柱。
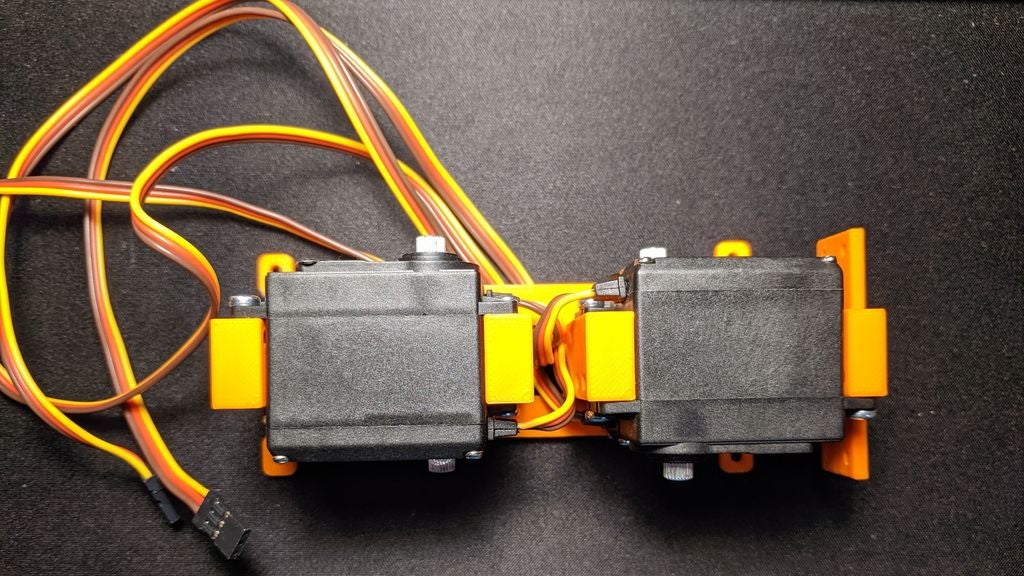
电缆管理很重要!将电缆穿过中心支柱之间的孔。它们将被引导穿过前臂外壳。
步骤3:将伺服滑轮添加到舵机

准备以下内容:
完成的伺服支架
4x完成的伺服滑轮
4x 4mm M3螺钉(通常随伺服器一起提供)
将每个滑轮按到每个电机轴上。现在确切的方向并不重要 - 稍后你会改变它。
用螺丝固定滑轮。我的舵机随附,但如果您需要单独购买,请检查您订购的内容。
伺服装配完成!
第4步:装配手













准备以下:
Palm(3D打印)
手指(3D打印
弹性尼龙绳
MG90S Micro Servo
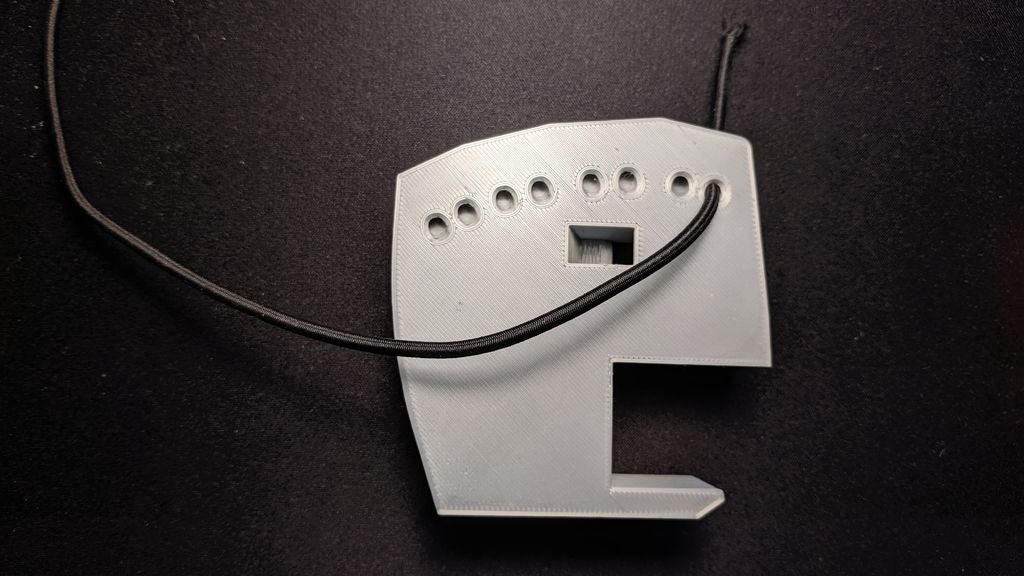
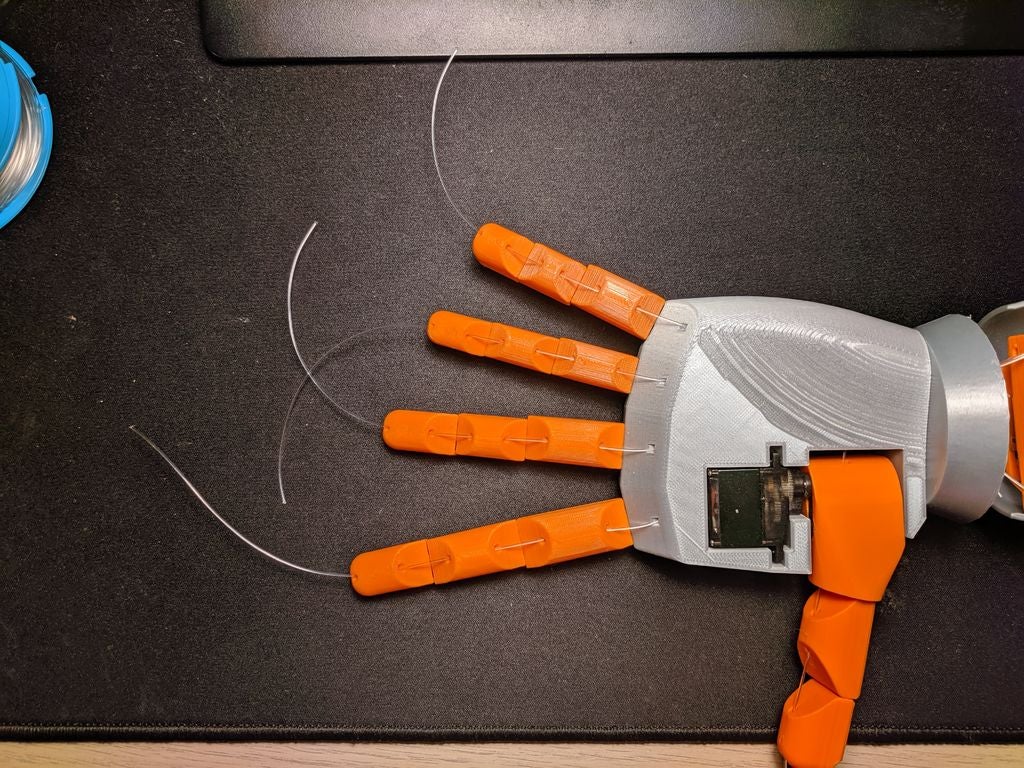
将尼龙绳的一端穿过手掌背面的一个孔,然后穿过相应手指上的孔。如果发现很难将绳子穿过由于磨损结束,请尝试将其包裹在一些胶带中,以使末端更顺畅。
将尼龙重新放回自身,然后穿过手指的第二组孔,最后穿过另一个掌心孔。
拧紧尼龙并将绳子的两端系在一起。试着弯曲手指并确保它快速向后拉直起来。如果不是,你需要将两端紧密结合在一起。
将绳索的末端切割成接近结。用烙铁烧烤尼龙的末端以阻止它们磨损可能是个好主意,但这并不总是必要的。
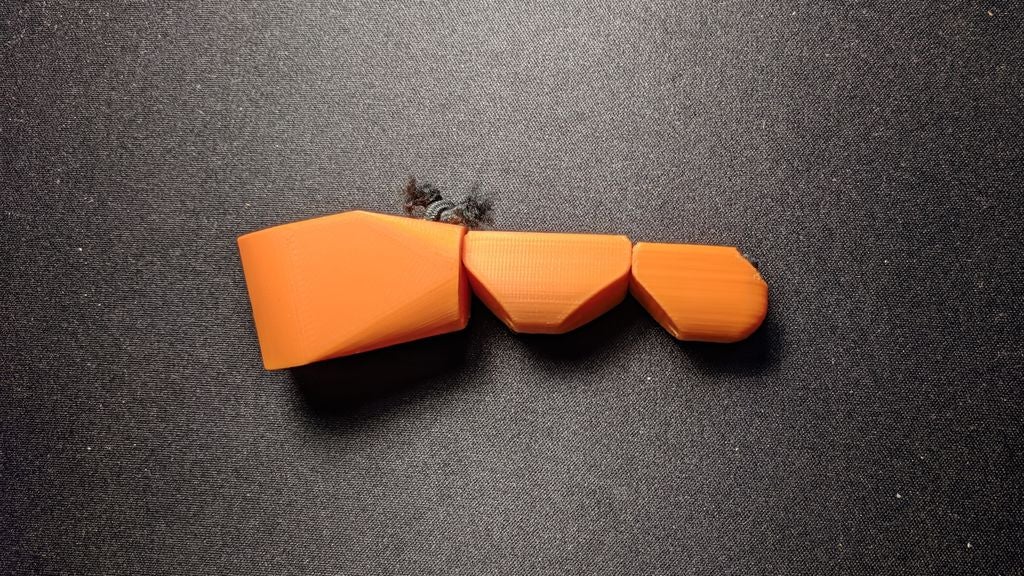
对剩余的3个手指重复步骤1-4。虽然我已经使用所有不同的印刷手指进行了演示,但您可能更喜欢根据自己的需要混合搭配不同的长度/宽度。
使用与上面相同的方法将Thumb绑定在一起。
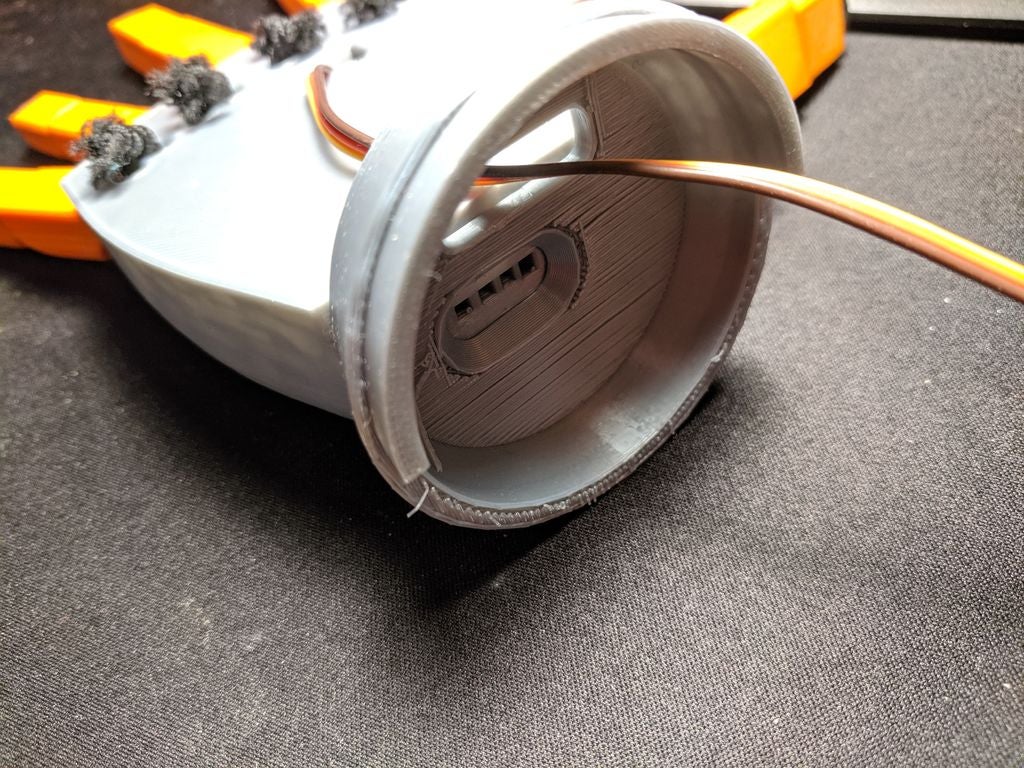
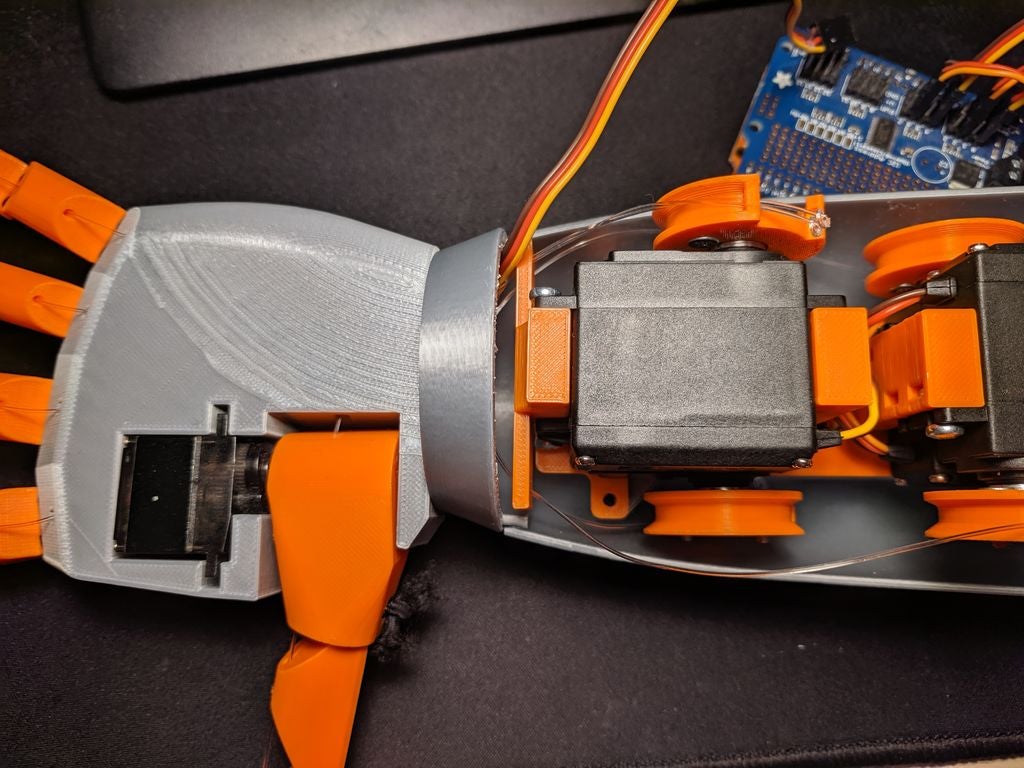
将Micro Servo(附带伺服喇叭)安装到拇指上。它应该是压配合(尽量不要破坏电机),但一点胶水可能有助于将其保持在适当的位置。不用担心,您可以使用拇指关节中的孔将电机从喇叭上拧下来取下电机。
将电缆穿过Palm中的孔,然后将电机推入插槽。 (您下载的设计可能与所示的设计略有不同,因为当您插入电机时,此设计会稍微捏住电缆。)
手完成!
步骤5:将手指连接到舵兵









准备以下内容:
持有人中的舵机
Constructed Palm
前臂(3D打印)
手腕(3D打印)
塑料胶
Arduino(或类似的微控制器) - 我使用了Arduino Uno。
伺服控制器板 - 我使用了Adafruit 16通道12位PWM/伺服防护罩
钓鱼线
4 x M3x10mm螺丝
4 x M3方螺母
将伺服系统连接到伺服控制器板。选择对您有意义的订单。我将前伺服连接到端口0和2,后伺服连接到4和6.
从Gihub下载伺服校准项目文件。您很可能必须根据连接伺服系统的方式修改值,或者它们的编码器范围略有不同。你对这个阶段负有责任,所以要小心不要让它们超过转弯的安全点。
运行程序,使所有伺服器都处于最前端位置。
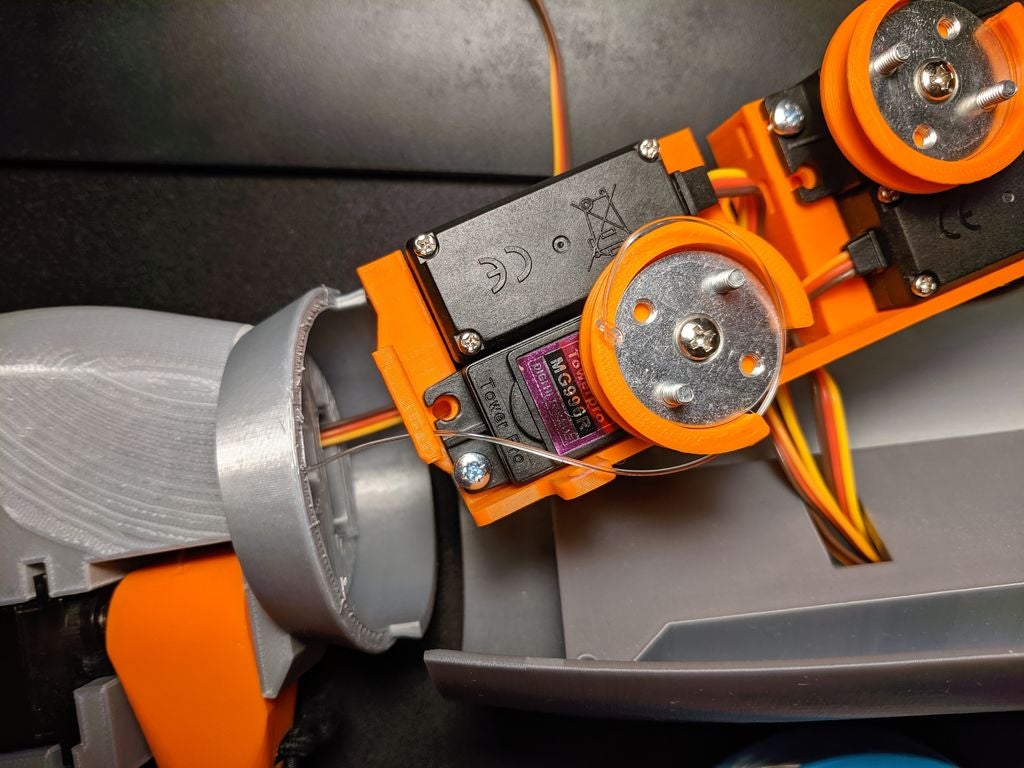
取下伺服喇叭并根据照片旋转它们。这使它们处于通过钓线连接后拉回手指的最佳位置。通过向后旋转伺服系统进行测试,它们应该如下图所示结束。
注意如何连接伺服电缆。现在拔掉它们,这样你就可以将电缆穿过前臂的布线,然后将它们连接到底部。如果可能,也将拇指伺服电缆穿过路径(从前臂顶部)。
将手腕部分粘在手上。只有一个方向可以让两个插在一起。确保拇指马达的电缆穿过手腕的较长插槽。
将钓鱼线穿过手指,手掌,导腕和伺服导轨。然后将每条线穿过其中一个伺服喇叭。第四个和小指应该在同一个号角上。确保将线穿过,使其不会与任何其他线摩擦。
在每个喇叭上系一个结,让手指末端的线松开。留下足够的松弛度以便打结。
使用螺母陷阱中的螺钉和螺母将伺服支架固定到前臂上。
将手腕粘在前臂顶部。
在每根手指的尖端打结。您可能会发现钓鱼线略微松弛,这是正常现象。要再次拧紧线,请取下伺服喇叭并将其旋转离开手,直到教导线。然后将喇叭重新安装到伺服系统上。
通过运行紧握拳头的程序来测试手。
如果一切正常,您就准备好了!做得好!
第6步:完成
主要结构已经完成,你已经准备好玩你的新机器人!
花些时间了解您的电机,微控制器及其局限性。尝试制作一些控制它的应用程序,也许是您所选语言的库。
-
机器人
+关注
关注
211文章
28398浏览量
207000 -
3D打印
+关注
关注
26文章
3548浏览量
109047
发布评论请先 登录
相关推荐

3D打印机优化:ARMxy嵌入式计算机的作用

应用在3D打印机的BD系列金属连接器
Klipper固件的打印机可以插卡打印吗?
2024年含直线电机3D打印机在内共出口182.9万台

3D打印汽车零部件建模设计3D打印服务

上海伯东工业级3D打印机为机器人的制造工艺带来新变革
UltiMaker正式推出了工业级3D打印机—UltiMaker Factor 4


YXC晶振 32.768KHz石英振荡器,封装3225,应用于3D打印机
能入3D打印机法眼,BD系列工业级连接器究竟有哪些独特之处?






 工商网监
工商网监
评论